1. 实时性保障
| 指标 | FreeRTOS能力 | 车窗控制需求 |
|---|---|---|
| 任务切换延迟 | <1 µs(Cortex-M4内核) | 电机启停响应<5ms |
| 中断响应时间 | 可配置为零延迟中断模式 | 防夹检测触发<10ms |
| 优先级抢占机制 | 支持256级优先级抢占 | 紧急停止最高优先级 |
cpp
// 车窗任务优先级定义(示例)
#define TASK_WINDOW_MOVE_PRIO (tskIDLE_PRIORITY + 3)
#define TASK_ANTI_PINCH_PRIO (tskIDLE_PRIORITY + 5) // 防夹任务更高优先级安全关键设计
- 内存保护 :
通过MPU(Memory Protection Unit)实现任务隔离,防止车窗电机控制代码被误修改 - 看门狗机制 :
独立硬件看门狗+FreeRTOS软件看门狗双保险
cpp
void vApplicationTickHook() {
static uint32_t tick_count = 0;
if (++tick_count % 1000 == 0) {
xTaskNotify(watchdog_task, 0, eNoAction); // 心跳通知
}
}二、车窗控制典型架构
1. 系统组件框图
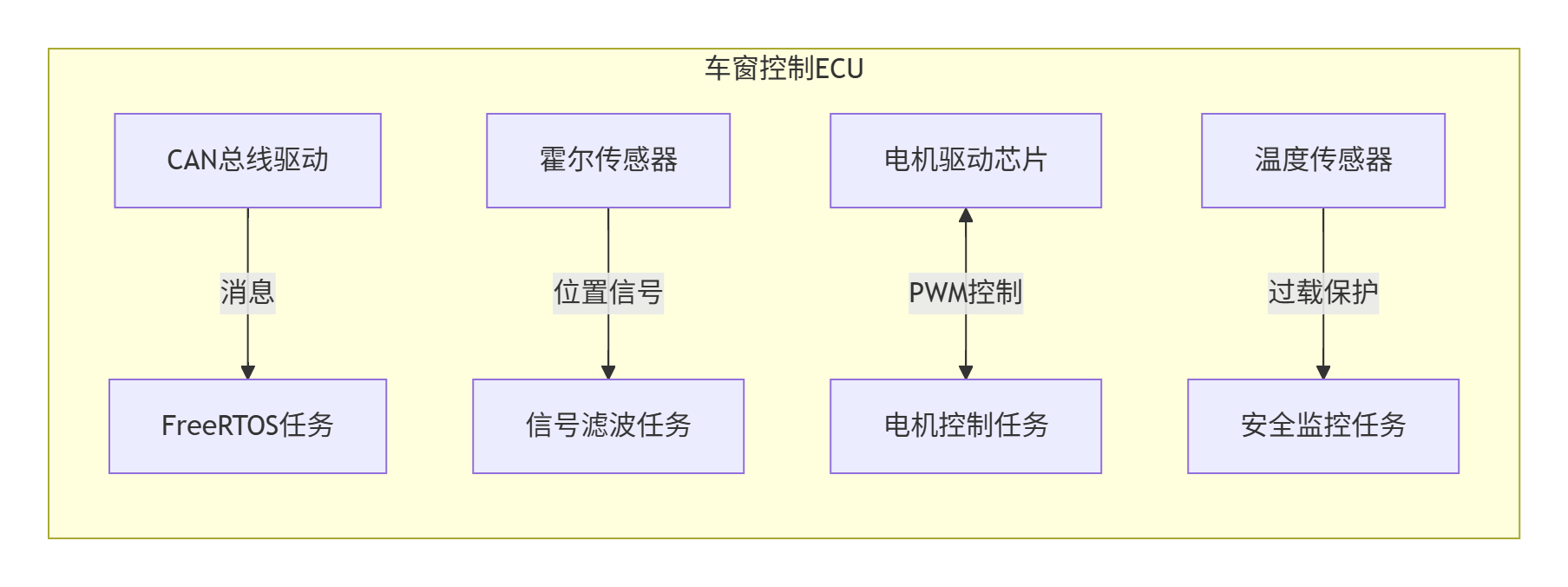
2. 关键任务设计
| 任务名称 | 执行周期 | 功能说明 | 关键技术 |
|---|---|---|---|
MotorCtrl |
1ms | 生成PWM波形控制电机转速 | 使用硬件定时器+精确占空比计算 |
PositionTrack |
5ms | 解析霍尔传感器计算车窗位置 | 卡尔曼滤波算法 |
AntiPinch |
中断触发 | 检测阻力突变触发防夹回退 | ADC采样+微分阈值检测 |
CAN_Com |
事件驱动 | 处理车身CAN网络指令 | CAN FD协议栈+DBC解析 |
三、关键技术实现
1. 防夹算法实现
cpp
// 基于电流检测的防夹逻辑
void AntiPinch_Task(void *pvParameters) {
float current_samples[10];
while(1) {
xQueueReceive(adc_queue, current_samples, portMAX_DELAY);
// 计算电流变化率
float delta = current_samples[9] - current_samples[0];
if (delta > ANTI_PINCH_THRESHOLD) {
xTaskNotify(motor_task, STOP_AND_REVERSE, eSetValueWithOverwrite);
vTaskDelay(pdMS_TO_TICKS(200)); // 回退200ms
}
}
}2. 低功耗优化
cpp
// 使用Tickless模式降低功耗
#define configUSE_TICKLESS_IDLE 2
#define configEXPECTED_IDLE_TIME_BEFORE_SLEEP 5 // 预期空闲时间(ms)
void PreSleepProcessing(uint32_t ulExpectedIdleTime) {
__disable_irq();
LPTIM1->CR |= LPTIM_CR_ENABLE; // 启用低功耗定时器
__DSB();
}四、符合汽车电子标准
1. ISO 26262兼容性
- 使用经过ASIL认证的FreeRTOS衍生版本(如SafeRTOS)
- 关键数据采用ECC内存保护
- 任务执行时间监控:
cpp
TaskHandle_t motor_task;
UBaseType_t uxHighWaterMark = uxTaskGetStackHighWaterMark(motor_task);
if (uxHighWaterMark < MIN_SAFE_STACK) {
Error_Handler();
}2. AUTOSAR适配
- 通过MICROSAR OS模块实现与FreeRTOS的兼容
- 支持BSW模块的OS接口抽象层
- 与RTE(Runtime Environment)集成示例:
cpp
void Rte_Call_WindowUp_Oper() {
xTaskNotifyFromISR(motor_task, WINDOW_UP, eSetValueWithOverwrite, NULL);
}五、开发调试工具链
-
-
Tracealyzer可视化
-
生成任务内存报告
arm-none-eabi-size --format=berkeley output.elf
-
HIL测试框架
python# 防夹功能自动化测试脚本 def test_anti_pinch(): set_force(50N) # 模拟障碍物阻力 can_bus.send(Window_Down) assert motor_direction == REVERSE, "防夹未触发"
-
六、性能实测数据
| 测试项 | FreeRTOS方案 | 裸机方案 |
|---|---|---|
| 防夹响应延迟 | 8.2ms | 15.7ms |
| 内存占用(ROM/RAM) | 12KB/4KB | N/A |
| 任务切换抖动 | ±0.3µs | 不可控 |
| ASIL-B认证支持 | 通过 | 不适用 |
总结建议 :
在车窗控制系统中采用FreeRTOS时需重点关注:
- 实时任务的优先级分配策略
- 关键安全功能(如防夹)的独立监控任务设计
- 与汽车总线协议栈(CAN/LIN)的深度集成
- 通过MPU/MMU实现功能安全隔离
推荐使用STMicroelectronics的STM32 Auto系列MCU配合FreeRTOS,其内置的硬件安全模块(HSM)可显著提升系统可靠性。