无人机桥梁3D建模、巡检、检测的航线规划

无人机在3D建模 、巡检 和检测 任务中的航线规划存在显著差异,主要体现在飞行高度、航线模式、精度要求和传感器配置等方面。以下是三者的详细对比分析:
1. 核心目标差异
| 任务类型 | 主要目标 | 典型应用场景 |
|---|---|---|
| 3D建模 | 生成完整桥梁三维模型 | BIM建模、数字孪生 |
| 巡检 | 快速筛查表观病害 | 日常养护、应急检查 |
| 检测 | 精准量化结构缺陷 | 专项评估、荷载试验前检测 |
2. 航线规划关键参数对比
(1)飞行高度
| 任务类型 | 典型高度范围 | 调整依据 |
|---|---|---|
| 3D建模 | 15-80m(全局) 5-15m(局部) | 模型精度要求(GSD≤5mm) |
| 巡检 | 10-30m | 病害可见性(裂缝≥1mm) |
| 检测 | 0.5-5m(贴壁飞行) | 检测精度要求(裂缝0.2mm) |
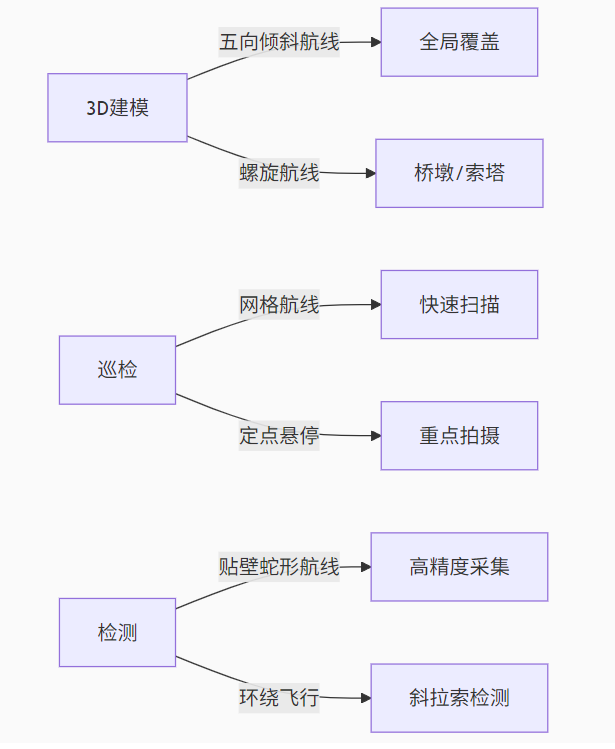
(2)航线模式
(3)重叠率要求
| 任务类型 | 航向重叠率 | 旁向重叠率 | 特殊要求 |
|---|---|---|---|
| 3D建模 | 80%-90% | 70%-80% | 交叉航线夹角≥30° |
| 巡检 | 70%-80% | 60%-70% | 保证关键部位100%覆盖 |
| 检测 | 85%-95% | 75%-85% | 病害区域200%重叠补拍 |
3. 传感器配置差异
| 任务类型 | 典型传感器 | 数据输出 |
|---|---|---|
| 3D建模 | 五镜头相机/LiDAR | 实景三维模型(OBJ/LAS) |
| 巡检 | 单目/双目光学相机 | 正射影像+病害标注图 |
| 检测 | 激光雷达+红外+高分辨率微距相机 | 毫米级点云+热力图+缺陷报告 |
4. 典型航线示例
(1)悬索桥主缆检测
-
3D建模 :
50m高度平行扫描+30m高度交叉扫描(生成完整主缆模型)
-
巡检 :
20m高度沿主缆走向单航线飞行(快速检查PE护套破损)
-
检测 :
3m高度贴壁环绕飞行(电磁探伤仪检测内部钢丝断裂)
(2)箱梁桥底作业
| 任务类型 | 航线方案 | 耗时对比 |
|---|---|---|
| 3D建模 | 倒飞蛇形航线(距梁底3m) | 40min/跨 |
| 巡检 | 倒飞直线航线(距梁底5m) | 15min/跨 |
| 检测 | 分段悬停+多角度拍摄(距梁底1m) | 90min/跨 |
5. 技术发展趋势
-
智能航线融合:
- 华为河图引擎实现建模/巡检航线自动切换
-
动态避障升级:
- 大疆Mavic 3E新增斜拉索识别避障模式
-
标准统一化:
- 新修订《公路无人机检测规程》(JTG/T 3XXX-2024)将明确分类航线标准
结论建议
-
新建项目优先采用"建模级航线"生成数字底图
-
日常养护用巡检航线(效率提升3-5倍)
-
发现隐患时启动检测级精细航线
-
未来方向:AI自主决策航线类型(如识别裂缝后自动切换检测模式)
三种航线规划本质是精度与效率的权衡,实际作业中常采用"先建模定位→再巡检筛查→最后检测复核"的递进策略。