一、运行方式
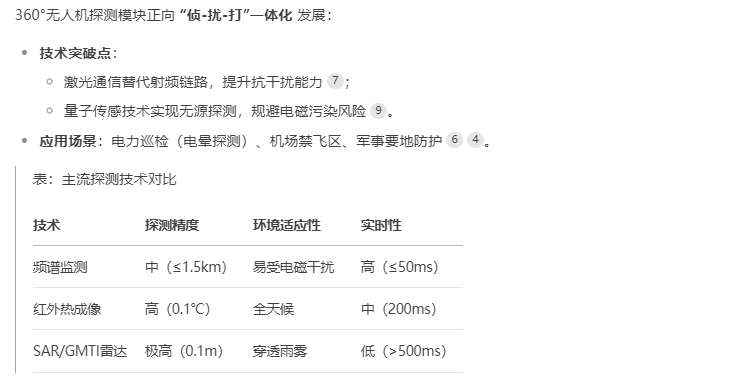
- 频谱监测与信号识别
全频段扫描:模块实时扫描900MHz、1.5GHz、2.4GHz、5.8GHz等无人机常用频段,覆盖遥控、图传及GPS导航信号。
多路分集技术:采用多传感器阵列,通过信号加权合并提升信噪比,精确定位无人机位置(误差≤1.5km)。
- 光电与雷达协同探测
红外热成像:搭载高灵敏度红外探测器,穿透烟雾/黑夜识别无人机热源,并联动可见光摄像头进行目标复核。
合成孔径雷达(SAR):在复杂气象条件下实现0.1米级高分辨率成像,结合GMTI模式追踪慢速移动目标(速度≥1英里/小时)。
- 智能决策与反制联动
侦测到目标后,系统自动触发干扰模块:
电磁压制:发射定向射频干扰,切断无人机导航及控制链路,迫使其悬停、返航或迫降。
物理拦截(可选):高能激光炮对军用级无人机实施硬摧毁。
二、技术要点
- 多频段协同探测
频段覆盖:需兼容消费级(2.4GHz/5.8GHz)与工业级(1.5GHz/5.1GHz)无人机信号,覆盖95%以上机型。
抗干扰设计:采用超窄带滤波抑制环境噪声,提升信噪比。
- 高精度定位与跟踪
传感器融合:结合光流测距、惯性导航及GPS数据,实现无GPS环境下的室内定位。
时空多维融合:通过时间/空间滤波算法消除误报,实时输出目标轨迹。
- 自适应干扰策略
分级反制:根据威胁等级选择干扰模式。
导航欺骗:模拟GPS信号诱导无人机偏离航线,避免坠落风险。
三、技术难点
- 复杂环境适应性
城市多径效应:建筑反射导致信号定位漂移,需优化MIMO雷达波束成形算法。
电磁兼容性(EMC):强电磁环境下易受干扰,需冗余交错驱动布局设计。
- 系统集成与实时性
多源数据融合延迟:SAR图像处理、红外热成像及频谱分析需低延迟(<100ms),对边缘算力要求极高。
功耗与散热:高功率干扰模块易导致设备过热,需轻量化散热设计(如凯茉锐红外模组的低功耗方案)。
- 智能识别与误报抑制
AI模型泛化:需训练大量数据集区分无人机与鸟类/风筝,且在夜间/雾天维持高准确率。
动态目标追踪:低速无人机(<3m/s)在GMTI模式下易漏检,需提升DMTI算法灵敏度。
四、总结与趋势