教程
成像原理
基础概念
焦距(物理焦距)
镜头的光学中心 到感光元件之间的距离,用f表示,单位:mm;。
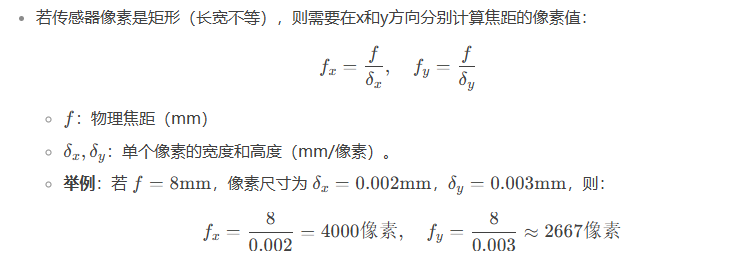
像素焦距
相机内参矩阵中的 fx 和 fy 是将物理焦距转换到像素坐标系的产物,可能不同。

主点(Principal Point)
-
cx,cy:
-
相机光轴在图像坐标系中的像素坐标。
-
理想情况下,主点位于图像的正中心(如 640×480 图像的主点为 (320,240)),但实际可能因镜头安装偏差存在微小偏移。
-
像元
即像素,像元尺寸即像素尺寸,单位:mm/μm。
,
其中dx,dy就是像元尺寸。
dx:单个像素水平方向的尺寸;
dy:单个像素垂直方向的尺寸;
像元尺寸获取从相机厂家的官网或者手册获取。