【无人机】无人机UAV、穿越机FPV的概念介绍,机型与工具,证书与规定
文章目录
-
- 1、无人机的定义、概念、技术栈
-
- [1.1 无人机的概念](#1.1 无人机的概念)
- [1.2 无人机技术(飞控,动力,通信)](#1.2 无人机技术(飞控,动力,通信))
- 2、无人机机型
-
- [2.1 DJI无人机 (航拍)](#2.1 DJI无人机 (航拍))
- [2.2 穿越机FPV工具](#2.2 穿越机FPV工具)
- 3、无人机证书与管控
-
- [3.1 UOM合格证(官方-个人)](#3.1 UOM合格证(官方-个人))
- [3.2 CAAC执照(官方-商用)](#3.2 CAAC执照(官方-商用))
- [3.3 地方飞行规定](#3.3 地方飞行规定)
1、无人机的定义、概念、技术栈
1.1 无人机的概念
无人机(Unmanned Aerial Vehicle, UAV) 是一种无需人类驾驶、能通过远程控制或自主程序完成飞行任务的航空器。其应用场景广泛,涵盖侦察、物流配送、农业植保、航拍测绘等领域。
- 区分术语的关键在于区分
"技术分类"(如动力形式、控制方式)
"应用场景"(如竞速、Jun用、民用) - 无人机(UAV/Drone) 是核心概念,技术体系涵盖飞行控制、动力、通信等领域,应用场景多元。
- 穿越机 是无人机的高性能子类,侧重速度与操控性;
RPA 属于无人机中依赖远程操控的类型。
UAS(无人机系统) 是更宏观的概念,包含无人机及配套设备;
| 术语 | 英文 | 定义与特点 | 所属范畴 / 关系 |
|---|---|---|---|
| UAV | Unmanned Aerial Vehicle | 无人驾驶航空器,涵盖所有类型的无人飞行器,包括侦察机、民用植保机等 | 标准术语,技术范畴明确 |
| 穿越机、FPV | FPV Drone | 一种高机动性无人机,配备第一人称视角(FPV)摄像头,用于竞速或极限飞行,速度可达 100km/h 以上 | 属于无人机(UAV)的子类,侧重娱乐与竞技场景 |
| Drone | Drone | 英文通用术语,泛指各类无人机,口语中常指代消费级航拍无人机 | 与 UAV 同义,属通用称呼 |
| UAS | Unmanned Aerial System | 无人机系统,包含无人机本体、地面控制站、通信链路、任务载荷等全要素 | UAV 的扩展概念,强调系统性(如Jun用无人机系统) |
| RPA | Remotely Piloted Aircraft | 远程驾驶航空器,需人工通过地面站实时操控,无自主飞行能力 | UAV 的子类,依赖人工干预(如早期靶机) |
1.2 无人机技术(飞控,动力,通信)
| 技术类型 | 具体内容 | 应用场景 / 作用 |
|---|---|---|
| 飞行控制技术 | - 飞控系统(FCU):包含陀螺仪、加速度计等传感器,实现姿态稳定与导航控制 - 自主导航算法:如 SLAM(同步定位与地图构建)、路径规划算法 | 确保无人机在无人工干预下稳定飞行,完成航线规划、避障等任务,适用于物流配送、巡检等场景 |
| 动力系统技术 | - 电机类型:无刷电机(主流)、有刷电机 - 能源类型:锂电池、氢燃料电池、燃油 - 动力效率优化:螺旋桨设计、动力分配算法 | 决定续航时间与负载能力,例如农业植保无人机需大载重,长航时无人机依赖氢燃料技术 |
| 通信与导航技术 | - 通信链路:无线电遥控(2.4GHz/5.8GHz)、卫星通信(如北斗、GPS) - 导航技术:惯性导航(INS)、视觉导航、激光雷达(LiDAR) | 保障远程控制指令传输与定位精度,军事无人机依赖抗干扰卫星通信,消费级无人机多用视觉导航 |
| 任务载荷技术 | - 光学相机 / 红外相机:用于航拍、热成像侦查 - 机械臂 / 喷洒系统:物流抓取、农业喷药 - 雷达 / 传感器:气象监测、环境检测 | 根据任务需求定制,如消防无人机搭载热成像相机,救援无人机配备抛投装置 |
| 材料与结构技术 | - 轻量化材料:碳纤维、航空铝合金、复合材料 - 气动设计:多旋翼(稳定性高)、固定翼(速度快)、复合翼(兼顾两者) | 影响飞行性能与抗风能力,多旋翼适合低空低速任务,固定翼适合长距离侦察 |
| 自主控制技术 | - 自主起降:视觉识别跑道或 GPS 定位 - 避障算法:双目视觉避障、ToF(飞行时间)测距 - 集群控制:多机协同作业算法 | 减少人工操作成本,例如快递无人机自动避障、农业无人机集群播种 |
飞控系统(FCS)功能
- 飞行稳定控制
姿态 / 高度 / 速度:通过传感器(IMU、气压计、GPS 等)实时调整电机 / 舵面,稳定俯仰、滚转、偏航,实现定高悬停、定点飞行。
抗干扰:抵消风力、气流影响,保持飞行平衡。 - 导航与路径规划
自主飞行:按预设航点、航线(如 "Z" 字形、网格路径)执行任务。
避障与返航:通过视觉 / 雷达检测障碍物并绕行;低电量 / 信号丢失时自动返航或迫降。 - 传感器数据融合
整合 IMU、GPS、视觉、超声波等多源数据,通过算法(如卡尔曼滤波)提升飞行状态精度。 - 通信与交互
指令接收:解析遥控器或地面站的操控指令(如手动控制、模式切换)。
状态反馈:实时传输电量、速度、故障警告等数据至地面端。 - 任务载荷协同
联动相机、喷洒设备、机械臂等载荷,匹配飞行状态(如航拍时同步云台角度、植保时调节喷药量)。 - 故障保护
冗余设计:多传感器备份、电机故障补偿,降低失控风险。
应急机制:低电量保护、程序看门狗防止系统崩溃。
地面站的功能
- 通信链路:实现与穿越机之间的双向数据传输,一方面接收来自穿越机的状态信息(如电池电压、电流、 altitude、方向、GPS 数据等)、视频图像(FPV 信号)等;另一方面向穿越机发送控制指令等。
- 任务规划(部分地面站具备):可进行航线设计、设置航点等,不过穿越机通常以手动操控为主,任务规划功能相对不像专业航拍无人机或工业无人机地面站那么常用和复杂,但在一些特定场景或比赛中也可能会用到简单的任务规划,比如设定特定的飞行路径或区域。
- 综合监控:实时显示穿越机的飞行状态参数、FPV 视频画面等,让操作者能直观了解穿越机的飞行情况,如是否出现异常数据、飞行姿态是否稳定等。
- 数据存储和校验:存储飞行过程中的各种数据,如飞行日志、视频数据等,以便事后分析和查阅;同时可能对数据进行校验,确保数据的准确性和完整性。
- 功能扩展:具备硬件和软件接口,可扩展其他功能,如连接外部设备(如天线 tracker、额外的传感器等)、接入不同的通信模块等。
参考资料:
无人机基本知识大攻略2017 back
Drone、UAV、UAS、RPA的区别是什么?
飞控技术
无人机飞控
2、无人机机型
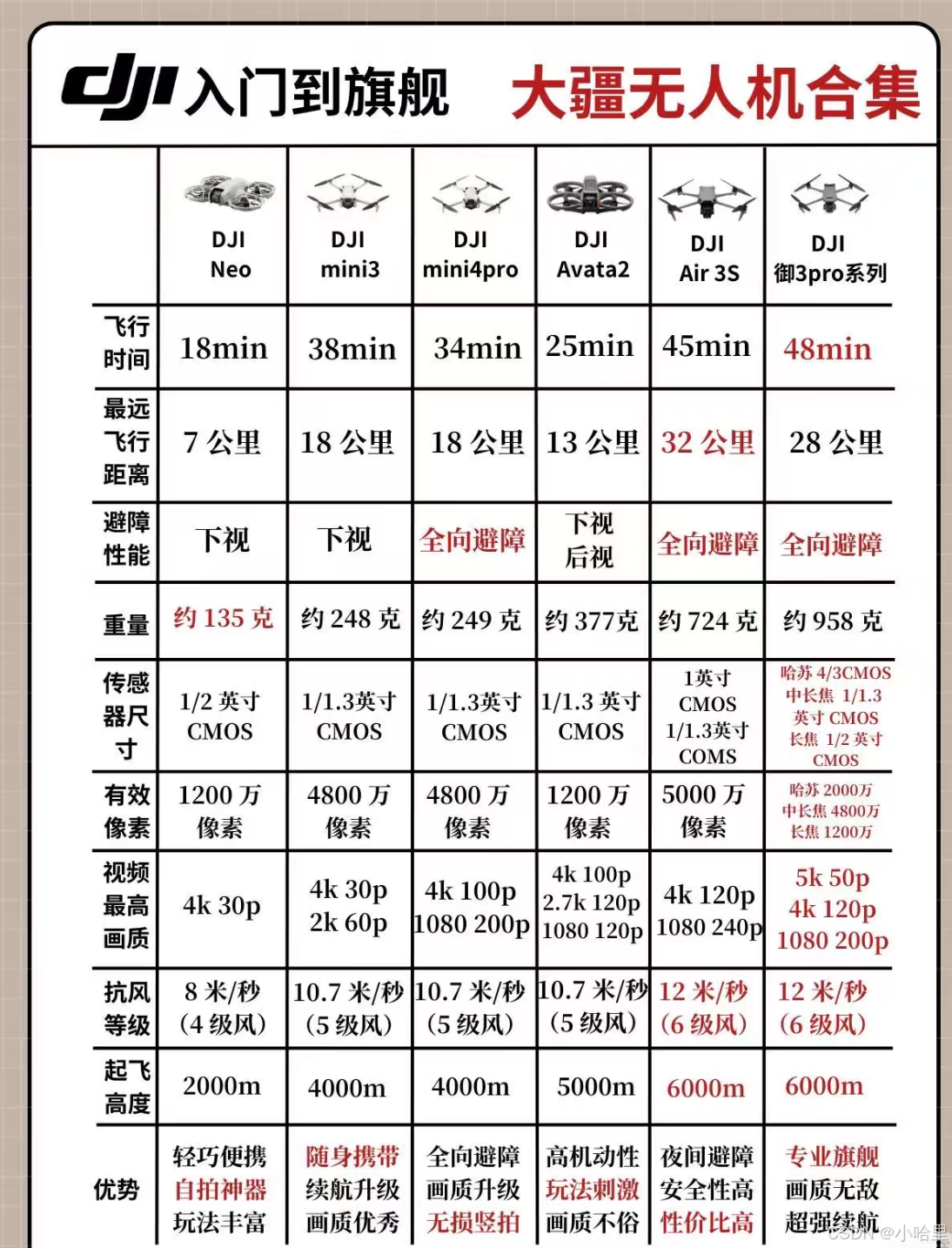
2.1 DJI无人机 (航拍)
参考:1
2.2 穿越机FPV工具
FPV介绍
- FPV 是 First-Person View(第一人称视角)的缩写,指的是一种飞行操控方式,即通过佩戴 FPV 眼镜或显示器,实时查看飞行器摄像头传回的视频信号来进行操控。采用这种操控方式的无人机被称为 FPV 无人机。
- 在实际中,FPV 无人机较多以多旋翼的形式出现 ,比如常见的四旋翼 FPV 无人机,因其具有较好的机动性和灵活性,适合进行高速穿越、特技飞行等操作;但也有固定翼形式的 FPV 无人机,不过相对较少,固定翼 FPV 无人机通常速度较快,适合长距离的高速飞行和特定的航拍等场景。
FPV工具 穿越机综合工具箱
-
地面站:
-
BF地面站
BetaFlight-WIN系统
BetaFlight-MAC系统
BetaFlight-安卓版
BetaFlight-网页版
SpeedybeeAPP:SpeedybeeAPP,手机调参方便快捷。
-
32位电调地面站
AM32地面站:SAM32 ESC 固件 速度控制器专用固件,专为多旋翼飞行器爱好者设计。
BLHeliSuite32 WIN版:BLHeliSuite是一款非常实用的电调调参软件,该软件适用于校准电调和电机,需要使用串行端口连接后,启动软件后根据提示进行校准,移动滑块来测试电机,给电调上电读取电调信息,读取电调信息后可就以设置电调的以数了,支持电调固件刷写。
BLHeliSuite32 MAC版
-
8位电调地面站
Bluejay蓝松鸦-电调配置程序:为简化固件升级、配置电调而生的工具。Web 应用程序支持运行 BLHeli for Atmel、BLHeli for SiLabs 和 BLHeli_S 固件的电调.
BLHeliSuite8 WIN版:BLHeliSuite是一款非常实用的电调调参软件,该软件适用于校准电调和电机,需要使用串行端口连接后,启动软件后根据提示进行校准,移动滑块来测试电机,给电调上电读取电调信息,读取电调信息后可就以设置电调的以数了,支持电调固件刷写。
BLHeliSuite8 MAC版
-
PID工具
PIDtoolbox-WIN版:PID调参工具,黑匣子日志分析工具,B站可以找到很多相关使用教程。用于分析飞机的PID参数噪音等用途。协助对PID进行调整。
PIDtoolbox-MAC版
Blackbox Log Viewer-Win系统:分析电机转速以及记录打杆状态的一个软件,更好的了解飞行状态。
Blackbox Log Viewer-MAC系统
-
综合工具
Steam-Windows
DJI眼镜拓频文件
PIDtoolbox-Windows系统
PIDtoolbox-MAC系统
ImpulseRC:飞控无法进入DFU模式的时候,可以尝试使用这个软件,可以帮你顺利进入DFU模式
Gyroflow-Windows系统:拍摄画面增稳软件,B站可以搜索到相关教程,通过陀螺仪数据对拍摄画面进行增稳。
Gyroflow-MAC系统
-
ELRS地面站
ExpressLRS地面站-Windows:ELRS地面站,用于更新ELRS高频头,接收机固件
ExpressLRS地面站-MAC
-
遥控器工具
OPENTX地面站-WIN系统:OpenTX是RC无线电遥控器的开源固件。固件是高度可配置的,并带来比传统遥控器更多的功能。来自成千上万用户的每日反馈确保了固件的持续稳定性和质量。
OPENTX地面站-MAC系统
EDGETX地面站-WIN系统:EDGE TX 是 OpenTX 的尖端。作为新一代的遥控器系统,支持遥控器触屏操作,可以支持中文界面的遥控器
EDGETX地面站-WIN系统:
黑羊地面站windows版本
EDGETX地面站-MAC系统
EDGETX地面站-MAC系统
-
INAV地面站
Windows:INAV配置器是INAV飞行控制系统的跨平台配置工具。它在googlechrome中作为一个应用程序运行,允许您配置在任何支持的INAV目标上运行的INAV软件。各种类型的飞机由该工具和INAV提供支持,例如四旋翼机、六旋翼机、八旋翼机和固定翼飞机。
-
DJI激活
DJI Assistant 2 windows版本,用于激活大疆FPV,vista天空端,大疆天空端,V1,V2眼镜,O3图传
DJI Assistant 2 MAC版本,用于激活大疆FPV产品升级固件使用,"软件暂不兼容macOS 11.x 系统,未来机型将得到解决。
-
KISS GUI
KISS地面站WIN版:KISS飞控地面站windows版本
-
遥控器出厂文件
HelloRdioSky:V16 V14 出厂SD卡文件,遥控器文件损坏后,可以覆盖文件进行修复
Jumper:T20 T15 T14 小蜜蜂 出厂SD卡文件,遥控器文件损坏后,可以覆盖文件进行修复
RdioMaster:TX16S GX12 出厂SD卡文件,遥控器文件损坏后,可以覆盖文件进行修复
-
接线图
speedybee:Speedybee品牌全系列接线接线图,F405 V4,F722 V3,F405 Mini,F405 Aio
Geprc:格普系列产品接线图
大通曼巴:大通曼巴系列产品接线图,F722MK4,F722MK5,H743V2
飞盈佳乐:飞盈佳乐系列接线图,猛禽
-
模拟器
Uncrashed:没有"赛车场"的地图
Freerider:玩家可以设计自己喜欢的飞机来模拟游戏中的飞行。
Liftoff:Liftoff是通往quadcopter赛车场的门户,适合有经验的飞行员或新手。
DCL:《DCL:FPV无人机竞赛》是一款无人机模拟飞行游戏,同时也是无人机冠军联盟(Drone Champions League)的官方电子游戏,在游戏中玩家可以驾驶来自 DCL 的原版无人机,感受最专业的无人机驾驶体验。
DRL:《DRL Simulator》是由The Drone Racing League制作并发行的第一人称无人机竞速和模拟游戏,于2017年6月16日首度发布,于2021年8月5日在Epic Games平台发行。
TRYP:《TRYP FPV:无人机竞速模拟器是由UNDEAD BATTERY制作并发行的一款模拟经营类游戏。
给他爱 单机版
3、无人机证书与管控
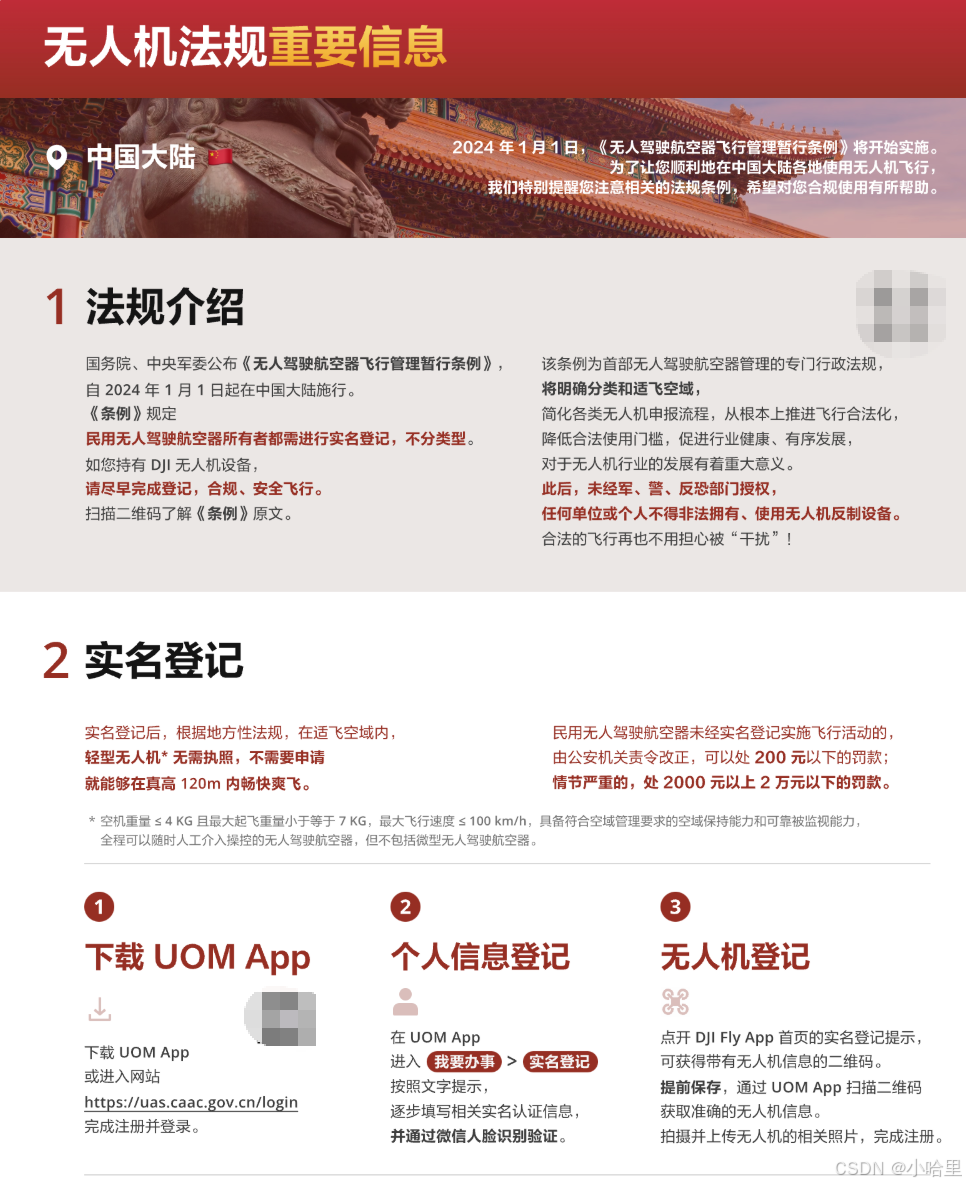
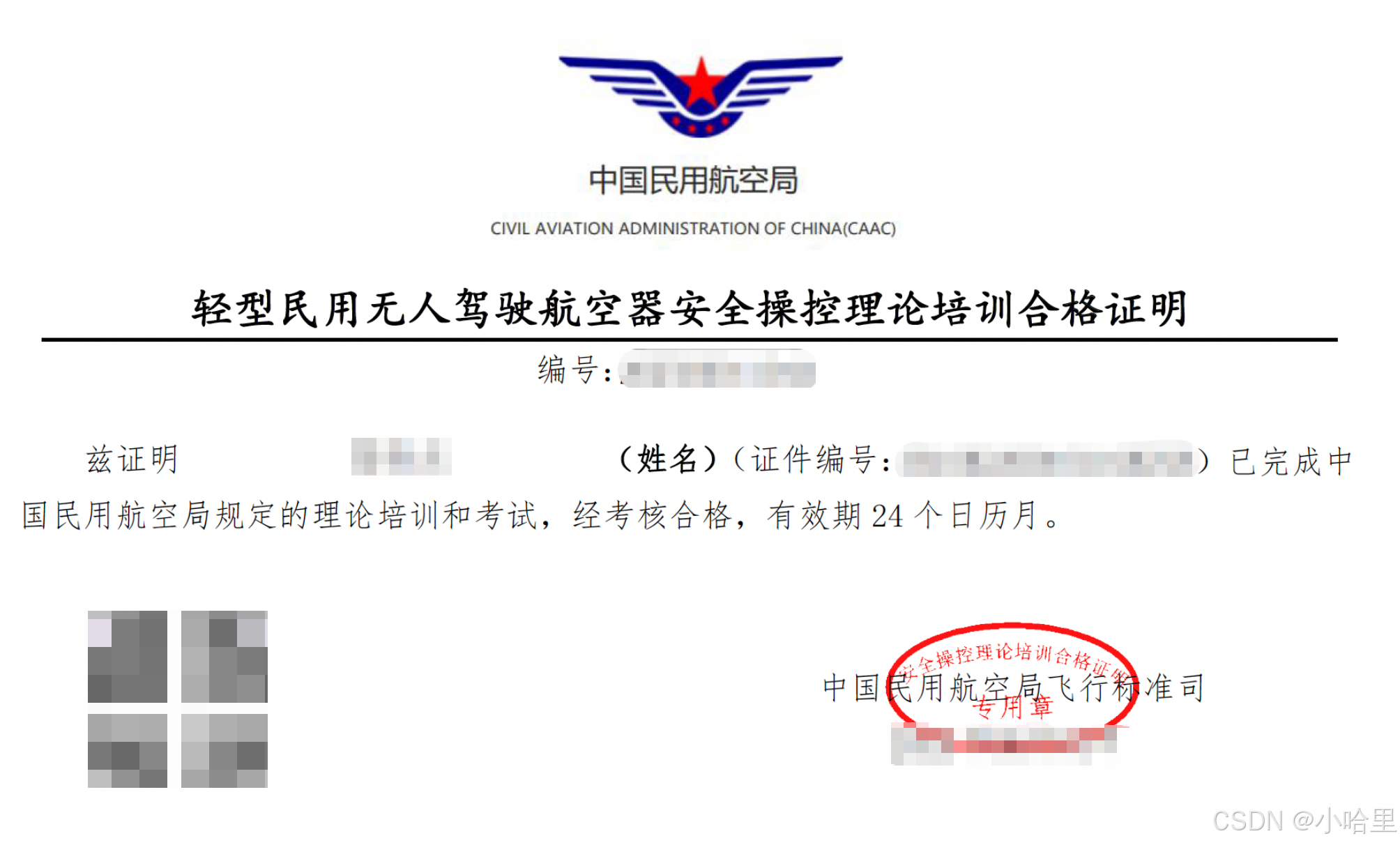
3.1 UOM合格证(官方-个人)
《轻型民用无人驾驶航空器安全操控理论培训合格证明》(简称UOM合格证)
- 是个人合法飞行的必备资质,2024年起,所有轻型无人机(≤4kg)操控者必须持证飞行。
- 民用无人驾驶航空器综合管理平台(UOM)
- UOM合格证教程
考试流程 :
视频45分钟,考试限时30分钟,建议预留2小时完成全流程。
1、点击【安全操控理论培训】→【在线视频培训】,学习两大模块
法规知识(16分钟)
多旋翼操作规范(33分钟);
必须累计学习≥45分钟
禁止倍速播放或中途离开,否则可能需重新学习
2、考试规则:
50道选择题,限时30分钟,80分及格(最多错10题);
禁止切换浏览器页签超过2次,否则成绩作废;
3、高频考点:
空域分类(适飞区/管制区)
飞行高度限制(真高120米)
紧急情况处置。
3.2 CAAC执照(官方-商用)
中国民航局 CAAC 无人机执照:
- 由中国民航局飞行标准司颁发,是法律认可的唯一无人机驾驶执照,具有极高法律效力。可申报空域、申请航线、从事无人机相关商业活动等,是从事无人机行业专业人士必备证书。(SHA约10000)
- CAAC执照类型
CAAC执照按照机型分为多旋翼、垂直起降固定翼、固定翼、直升机四种
按照重量分为III类(4KG<空机重量≤15kg)、IV类(15KG<空机重量≤116kg)两种
考取后可同时获得 CAAC 的《民用无人机操控员执照》,以及免试增发的 AOPA 的《民用无人驾驶航空器系统驾驶员合格证》和 ALPA 的《民用无人机操作员应用合格证》。 - 以多旋翼无人机超视距驾驶员为例 ,考试内容包括理论和实践两部分。
理论部分:理论考试、综合问答
实践部分:360度自旋(姿态模式)、水平八字(姿态模式),地面站考核
多旋翼无人机超视距驾驶员的培训周期为20天左右,最快15天可以拿到CAAC执照。


参考:1
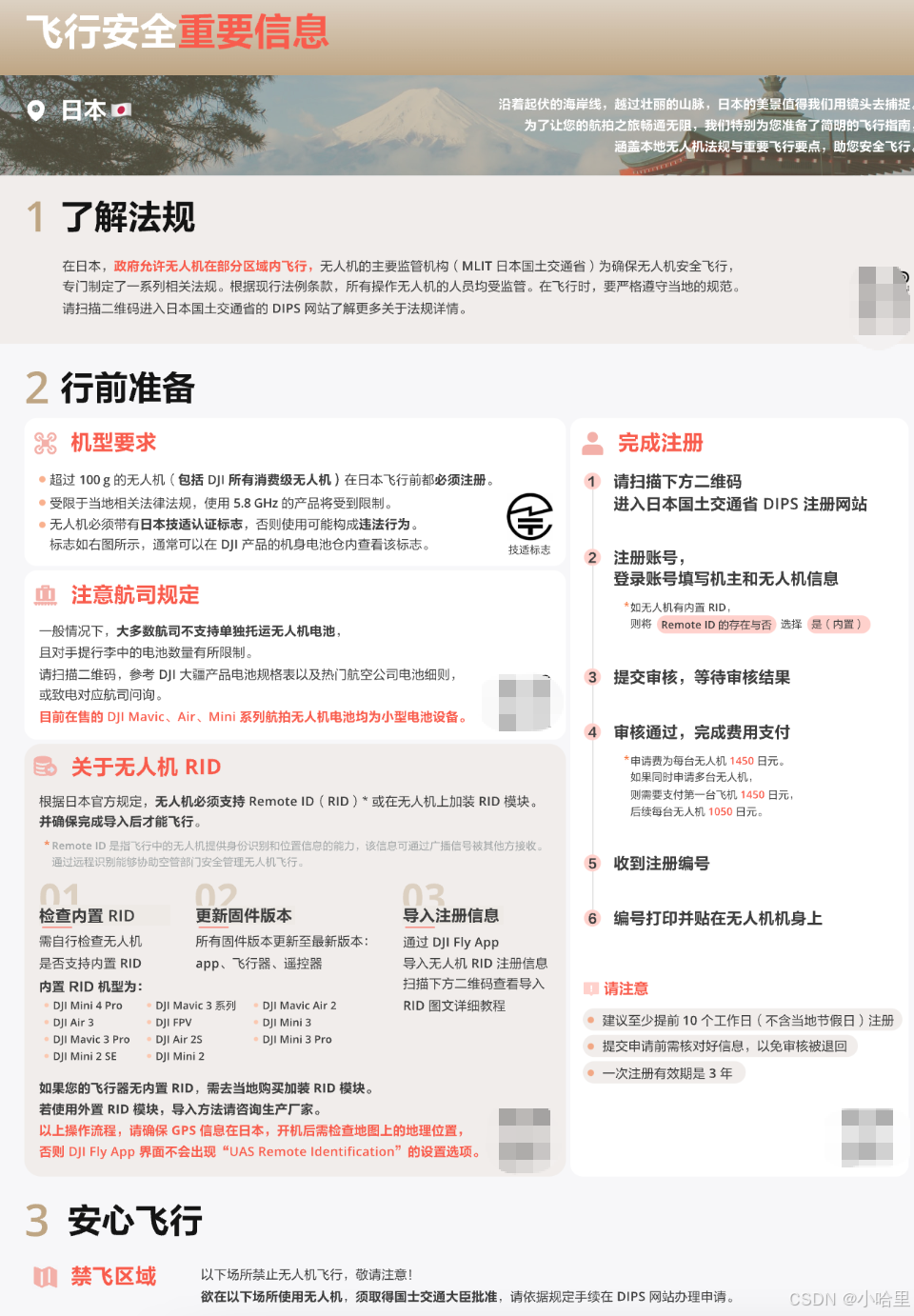
3.3 地方飞行规定
上海可以在随申办登记并申报,每次飞行前都需要报告,不过一秒就可以出结果