要求:
1.理论分析
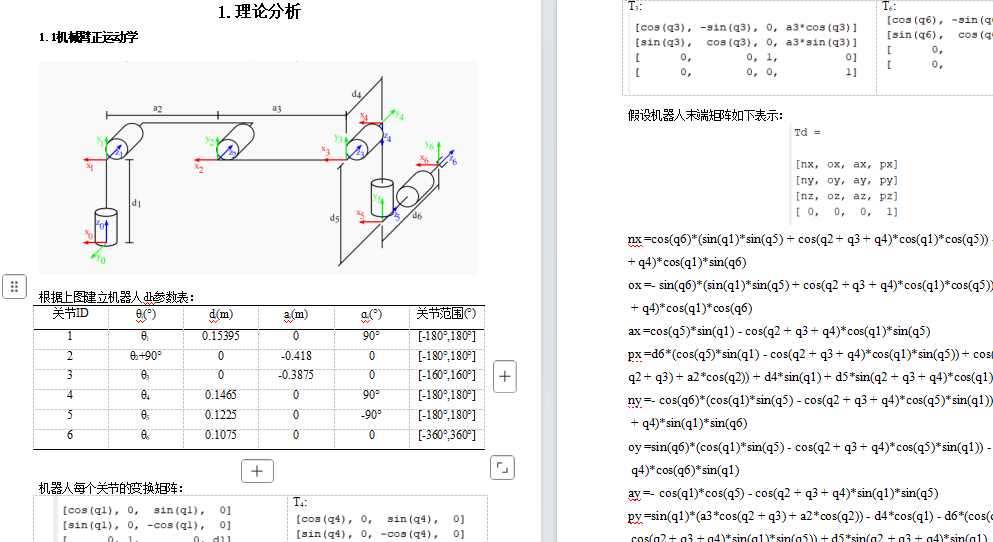
1.1 正向运动学:根据D-H法完成机器人的正向运动学(数学建模后基于Matlab计算公式);
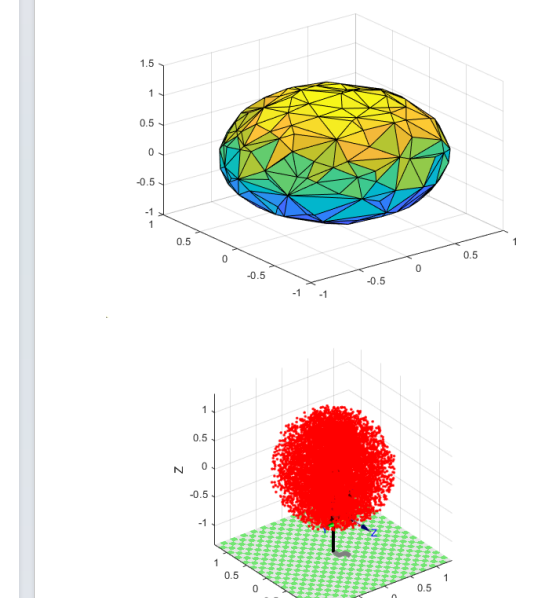
1.2 工作空间分析:根据正向运动学结果,运用 MATLAB进行工作空间分析,完成工作空间点云图和包络图;
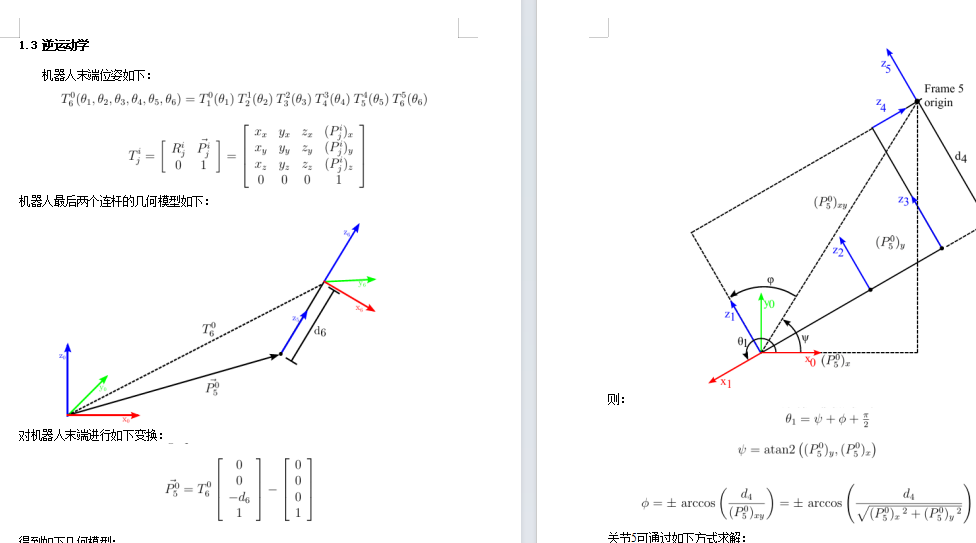
1.3 逆向运动学:根据正向运动学结果推导逆向运动学公式(封闭逆解);
2.基于Matlab Robotics Toolbox的机器人仿真分析
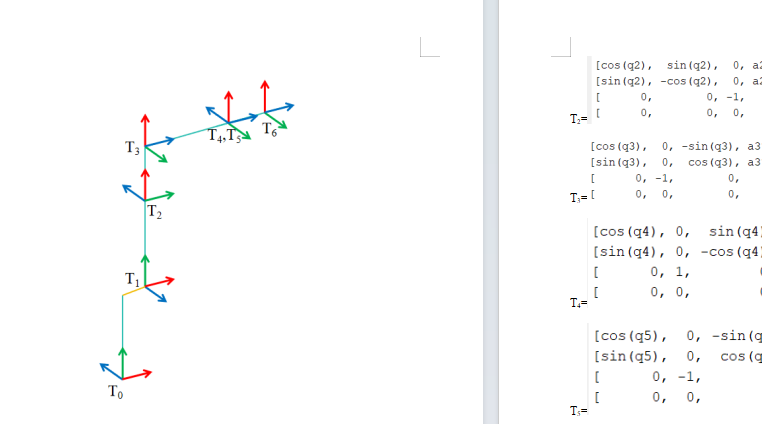
2.1 基于Matlab Robotics Toolbox完成机器人模型的建立;
2.2 在工作空间中规划一条工作任务轨迹,完成基于关节空间的轨迹规划;
2.2.1 在工作空间中规划一条工作任务轨迹,可利用teach功能辅助完成;
2.2.2 找到工作任务上的关键示教点,求出其运动学逆解,并带入1.3中验证逆向运动学公式的正确性;
2.2.3 在关键示教点间完成基于关节空间的轨迹规划,并基于Matlab Robotics Toolbox显示带有末端轨迹的动态运动结果。
打赏请链接:飞舞的哲
1.ER12-2100





2.ER12H-2000



3.ER25-2700


4.ER35-1800


5.EXR210-2700


6.GR1600-1700




7.ER15-1400



8.ER15H-1400



9.ER50-1900



10.ER10-700



11.GR6160-3200




12.ECR5