问题:我想把打印姿态传感器的角度,但是重定向的打印函数突然打印不出来。
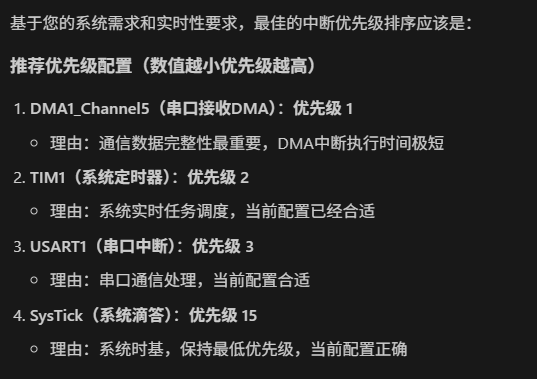
尝试:我怀疑是优先级的问题,故调整了串口,定时器,dma的优先级
可是发现调了还是没有用,最终发现,我把定时器中的任务屏蔽后可以正常使用了
根本原因是:定时器中断服务程序(ISR)执行时间过长且优先级过高,导致系统被"锁死"在中断中
解决办法:
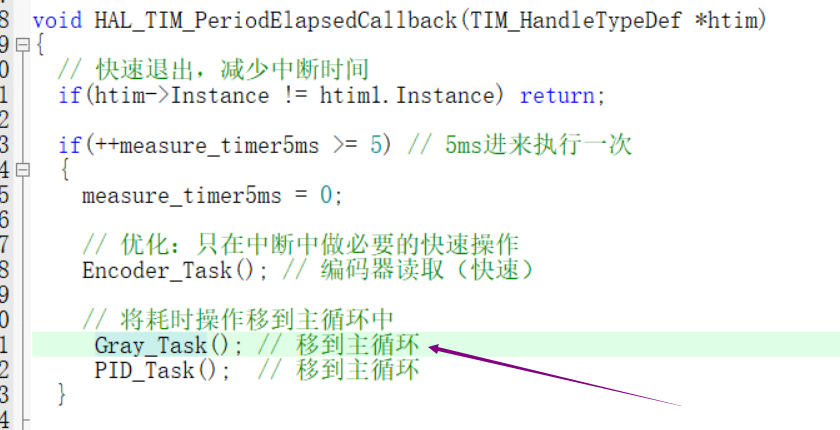
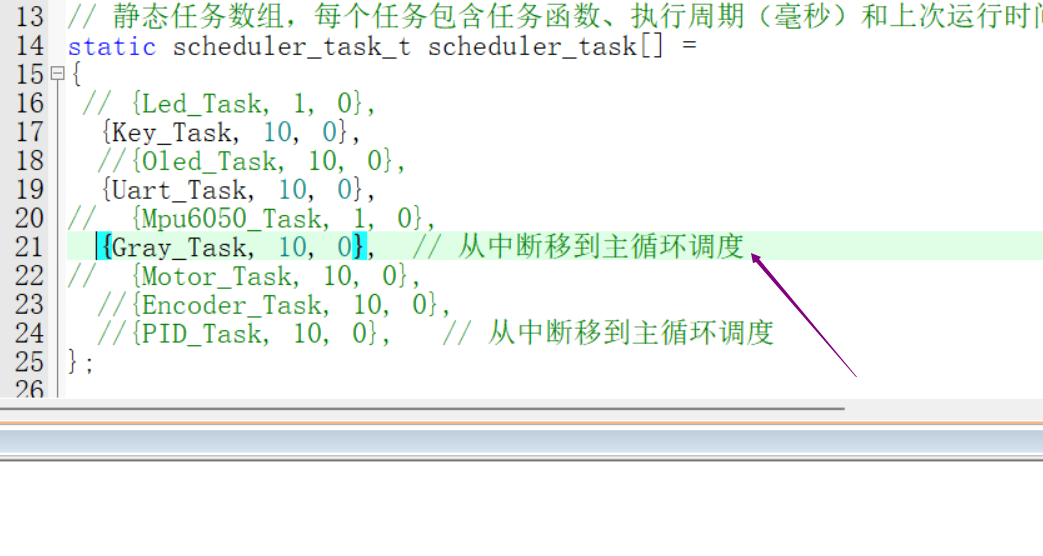
把耗时的任务移到任务调度器或者主循环里即可。
问题:我想把打印姿态传感器的角度,但是重定向的打印函数突然打印不出来。
尝试:我怀疑是优先级的问题,故调整了串口,定时器,dma的优先级
可是发现调了还是没有用,最终发现,我把定时器中的任务屏蔽后可以正常使用了
根本原因是:定时器中断服务程序(ISR)执行时间过长且优先级过高,导致系统被"锁死"在中断中
解决办法:
把耗时的任务移到任务调度器或者主循环里即可。