一、LockSupport
LockSupport是JDK中比较底层的类,用来创建锁和其他同步工具类的基本线程阻塞原语。
Java锁和同步器框架的核心AQS:AbstractQueuedSynchronizer,就是通过调用LockSupport.park()和LockSupport.unpark()实现线程的阻塞和唤醒的。LockSupport很类似于二元信号量(只有1个许可证可供使用),如果这个许可还没有被占用,当前线程获取许可并继续执行;如果许可已经被占用,当前线程阻塞,等待获取许可。
LockSupport中的park() 和 unpark() 的作用分别是阻塞线程和解除阻塞线程,而且park()和unpark()不会遇到"Thread.suspend 和 Thread.resume所可能引发的死锁"问题。因为park() 和 unpark()有许可的存在;调用 park() 的线程和另一个试图将其 unpark() 的线程之间的竞争将保持活性。
1.1、LockSupport函数列表
arduino
public class LockSupport {
// 返回提供给最近一次尚未解除阻塞的 park 方法调用的 blocker 对象,如果该调用不受阻塞,则返回 null。
static Object getBlocker(Thread t);
// 为了线程调度,禁用当前线程,除非许可可用。
static void park();
// 为了线程调度,在许可可用之前禁用当前线程。
static void park(Object blocker);
// 为了线程调度禁用当前线程,最多等待指定的等待时间,除非许可可用。
static void parkNanos(long nanos);
// 为了线程调度,在许可可用前禁用当前线程,并最多等待指定的等待时间。
static void parkNanos(Object blocker, long nanos);
// 为了线程调度,在指定的时限前禁用当前线程,除非许可可用。
static void parkUntil(long deadline);
// 为了线程调度,在指定的时限前禁用当前线程,除非许可可用。
static void parkUntil(Object blocker, long deadline);
// 如果给定线程的许可尚不可用,则使其可用。
static void unpark(Thread thread);
}说明:LockSupport是通过调用Unsafe函数中的接口实现阻塞和解除阻塞的。
1.2、基本使用
scss
// 暂停当前线程
LockSupport.park();
// 恢复某个线程的运行
LockSupport.unpark(暂停线程对象)先 park 再 unpark
lua
Thread t1 = new Thread(() -> {
log.debug("start...");
sleep(1);
log.debug("park...");
LockSupport.park();
log.debug("resume...");
},"t1");
t1.start();
sleep(2);
log.debug("unpark...");
LockSupport.unpark(t1);输出:
ini
18:42:52.585 c.TestParkUnpark [t1] - start...
18:42:53.589 c.TestParkUnpark [t1] - park...
18:42:54.583 c.TestParkUnpark [main] - unpark...
18:42:54.583 c.TestParkUnpark [t1] - resume...先 unpark 再 park
lua
Thread t1 = new Thread(() -> {
log.debug("start...");
sleep(2);
log.debug("park...");
LockSupport.park();
log.debug("resume...");
}, "t1");
t1.start();
sleep(1);
log.debug("unpark...");
LockSupport.unpark(t1);输出:
ini
18:43:50.765 c.TestParkUnpark [t1] - start...
18:43:51.764 c.TestParkUnpark [main] - unpark...
18:43:52.769 c.TestParkUnpark [t1] - park...
18:43:52.769 c.TestParkUnpark [t1] - resume...1.3、特点
在调用对象的Wait之前当前线程必须先获得该对象的监视器(Synchronized),被唤醒之后需要重新获取到监视器才能继续执行。而LockSupport并不需要获取对象的监视器。
与 Object 的 wait & notify 相比
- 1、wait,notify 和 notifyAll 必须配合 Object Monitor 一起使用,而 park,unpark 不必。
- 2、park & unpark 是以线程为单位来【阻塞】和【唤醒】线程,而 notify 只能随机唤醒一个等待线程,notifyAll是唤醒所有等待线程,但不那么【精确】。
- 3、park & unpark 可以先 unpark,而 wait & notify 不能先 notify。
因为它们本身的实现机制不一样,所以它们之间没有交集,也就是说LockSupport阻塞的线程,notify/notifyAll没法唤醒。
虽然两者用法不同,但是有一点, LockSupport 的park和Object的wait一样也能响应中断。
java
public class LockSupportTest {
public static void main(String[] args) throws InterruptedException {
Thread t = new Thread(() -> {
LockSupport.park();
System.out.println("thread:"+Thread.currentThread().getName()+"awake");
},"t1");
t.start();
Thread.sleep(2000);
//中断
t.interrupt();
}
}二、LockSupport park & unpark原理
每个线程都会关联一个 Parker 对象,每个 Parker 对象都各自维护了三个角色:_counter(计数器)、 _mutex(互斥量)、_cond(条件变量)。
2.1、情况一,先调用park,再调用unpark
park 操作
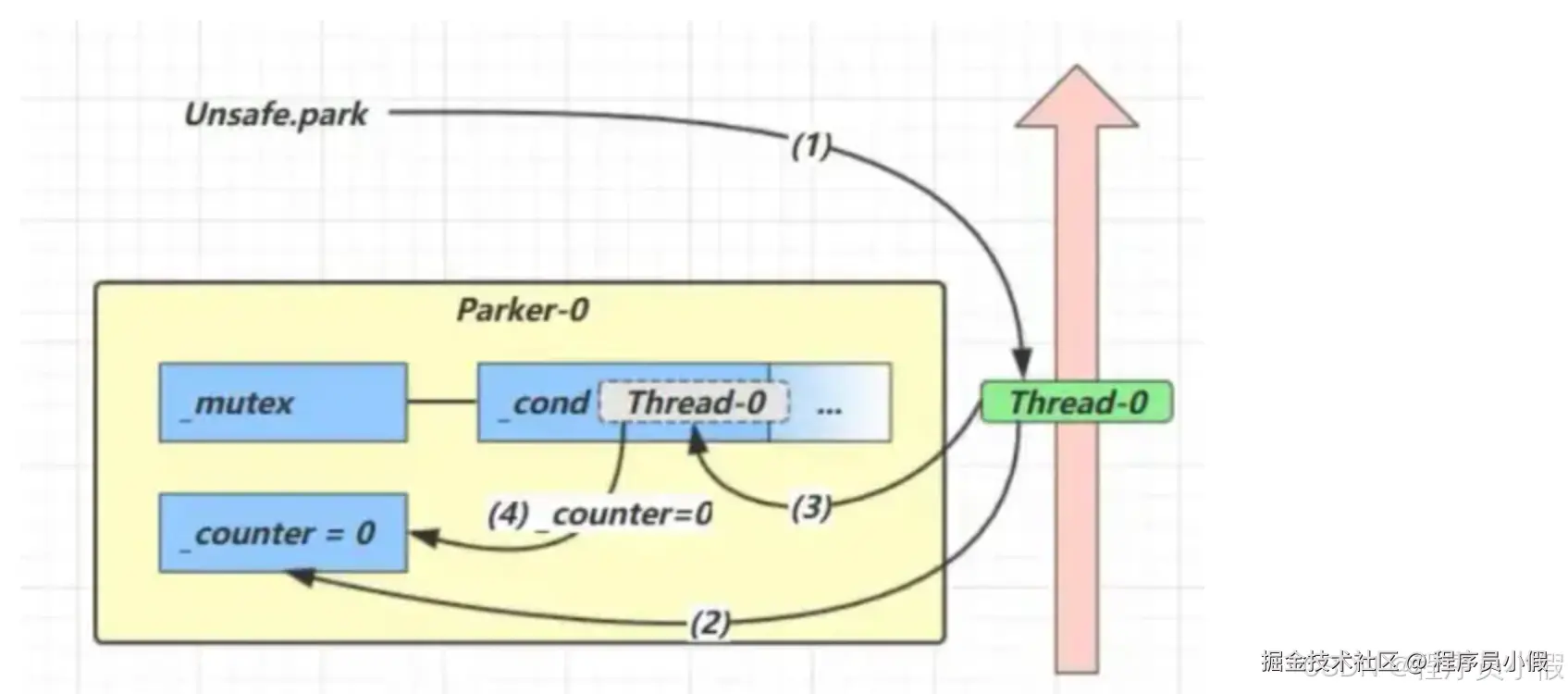
-
当前线程调用
Unsafe.park()方法 -
检查
_counter,本情况为 0,这时,获得_mutex互斥锁 -
线程进入
_cond条件变量阻塞 -
unpark 操作
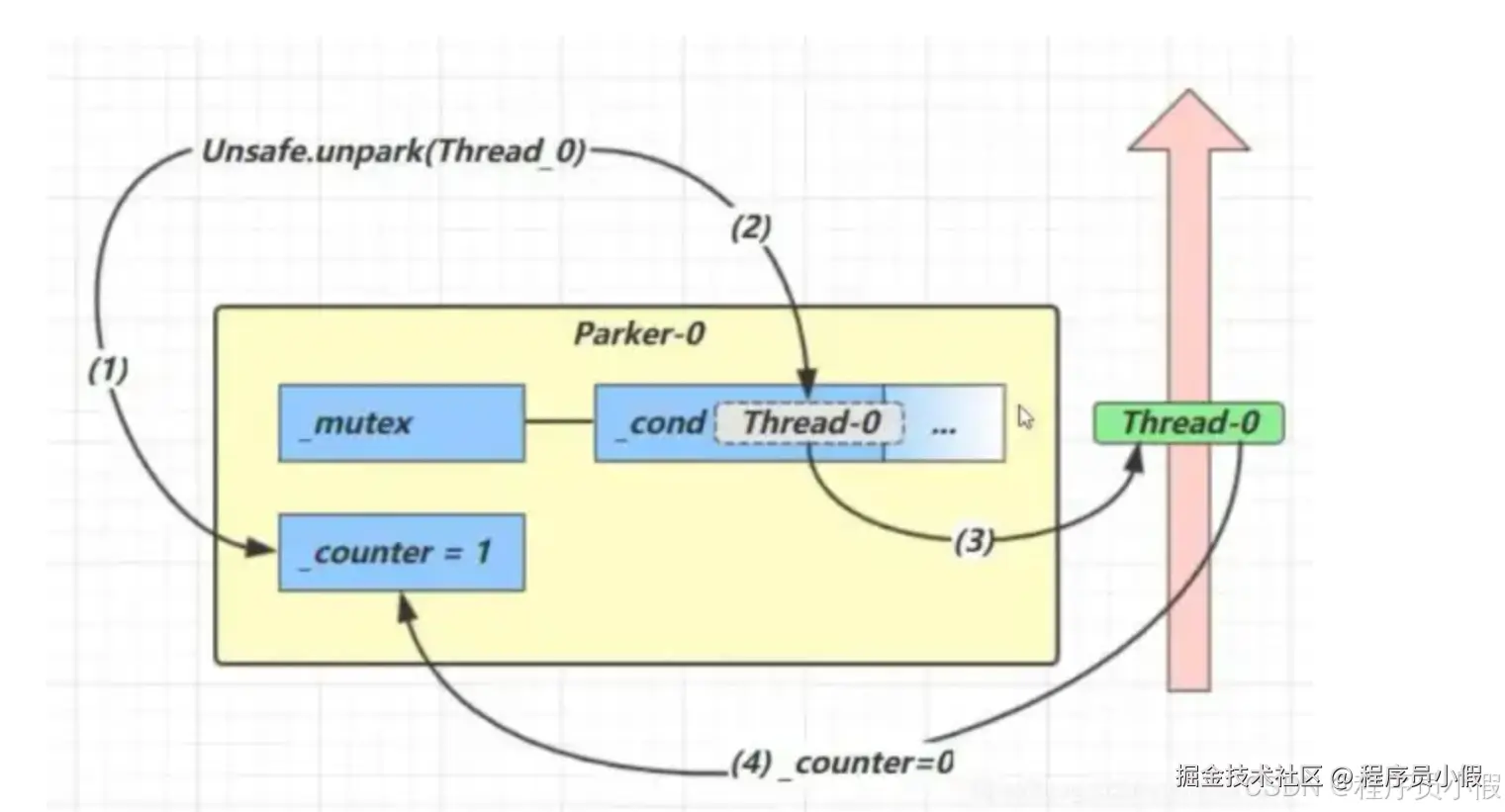
-
调用
Unsafe.unpark(Thread_0)方法,设置_counter为 1 -
唤醒
_cond条件变量中的Thread_0 -
Thread_0恢复运行 -
2.2、情况二,先调用unpark,再调用park
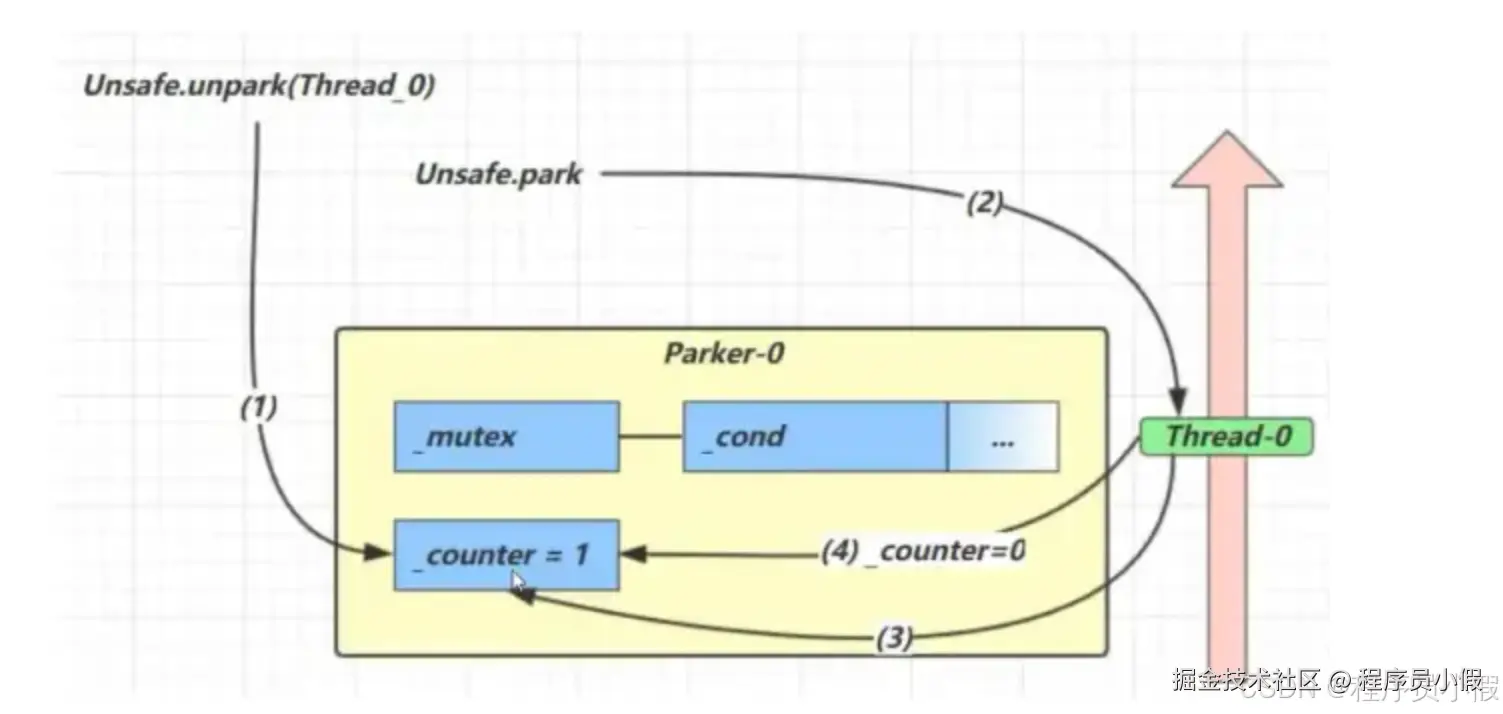
-
调用
Unsafe.unpark(Thread_0)方法,设置_counter为 1 -
当前线程调用
Unsafe.park()方法 -
检查
_counter,本情况为 1,这时线程无需阻塞,继续运行 -
三、LockSupport Java源码解析
3.1 变量说明
arduinopublic class LockSupport { // Hotspot implementation via intrinsics API //unsafe常量,设置为使用Unsafe.compareAndSwapInt进行更新 //UNSAFE字段表示sun.misc.Unsafe类,一般程序中不允许直接调用 private static final sun.misc.Unsafe UNSAFE; //表示parkBlocker在内存地址的偏移量 private static final long parkBlockerOffset; //表示threadLocalRandomSeed在内存地址的偏移量,此变量的作用暂时还不了解 private static final long SEED; //表示threadLocalRandomProbe在内存地址的偏移量,此变量的作用暂时还不了解 private static final long PROBE; //表示threadLocalRandomSecondarySeed在内存地址的偏移量 // 作用是 可以通过nextSecondarySeed()方法来获取随机数 private static final long SECONDARY; }变量是如何获取其实例对象的?
inipublic class LockSupport { static { try { //实例化unsafe对象 UNSAFE = sun.misc.Unsafe.getUnsafe(); Class<?> tk = Thread.class; //利用unsafe对象来获取parkBlocker在内存地址的偏移量 parkBlockerOffset = UNSAFE.objectFieldOffset(tk.getDeclaredField("parkBlocker")); //利用unsafe对象来获取threadLocalRandomSeed在内存地址的偏移量 SEED = UNSAFE.objectFieldOffset(tk.getDeclaredField("threadLocalRandomSeed")); //利用unsafe对象来获取threadLocalRandomProbe在内存地址的偏移量 PROBE = UNSAFE.objectFieldOffset(tk.getDeclaredField("threadLocalRandomProbe")); //利用unsafe对象来获取threadLocalRandomSecondarySeed在内存地址的偏移量 SECONDARY = UNSAFE.objectFieldOffset(tk.getDeclaredField("threadLocalRandomSecondarySeed")); } catch (Exception ex) { throw new Error(ex); } } }由上面代码可知这些变量是通过
static代码块在类加载的时候就通过unsafe对象获取其在内存地址的偏移量了。3.2 构造方法
csharppublic class LockSupport { //LockSupport只有一个私有构造函数,无法被实例化。 private LockSupport() {} // Cannot be instantiated. }3.3 两个特殊的方法
typescriptpublic class LockSupport { //设置线程t的parkBlocker字段的值为arg private static void setBlocker(Thread t, Object arg) { // Even though volatile, hotspot doesn't need a write barrier here. //尽管hotspot易变,但在这里并不需要写屏障。 UNSAFE.putObject(t, parkBlockerOffset, arg); } //获取当前线程的Blocker值 public static Object getBlocker(Thread t) { //若当前线程为空就抛出异常 if (t == null) throw new NullPointerException(); //利用unsafe对象获取当前线程的Blocker值 return UNSAFE.getObjectVolatile(t, parkBlockerOffset); } }1、
unpark(Thread thread)方法arduinopublic class LockSupport { //释放该线程的阻塞状态,即类似释放锁,只不过这里是将许可设置为1 public static void unpark(Thread thread) { //判断线程是否为空 if (thread != null) //释放该线程许可 UNSAFE.unpark(thread); } }2、
park(Object blocker)方法 和park()方法typescriptpublic class LockSupport { //阻塞当前线程,并且将当前线程的parkBlocker字段设置为blocker public static void park(Object blocker) { //获取当前线程 Thread t = Thread.currentThread(); //将当前线程的parkBlocker字段设置为blocker setBlocker(t, blocker); //阻塞当前线程,第一个参数表示isAbsolute,是否为绝对时间,第二个参数就是代表时间 UNSAFE.park(false, 0L); //重新可运行后再此设置Blocker setBlocker(t, null); } //无限阻塞线程,直到有其他线程调用unpark方法 public static void park() { UNSAFE.park(false, 0L); } }说明:
-
调用
park函数时,首先获取当前线程,然后设置当前线程的parkBlocker字段,即调用setBlocker函数, 之后调用Unsafe类的park函数,之后再调用setBlocker函数。park(Object blocker)函数中要调用两次setBlocker函数 -
1、调用
park函数时,当前线程首先设置好parkBlocker字段,然后再调用Unsafe的park函数,此时,当前线程就已经阻塞了,等待该线程的unpark函数被调用,所以后面的一个setBlocker函数无法运行,unpark函数被调用,该线程获得许可后,就可以继续运行了,也就运行第二个setBlocker,把该线程的parkBlocker字段设置为null,这样就完成了整个park函数的逻辑。 -
2、如果没有第二个
setBlocker,那么之后没有调用park(Object blocker),而直接调用getBlocker函数,得到的还是前一个park(Object blocker)设置的blocker,显然是不符合逻辑的。总之,必须要保证在park(Object blocker)整个函数 执行完后,该线程的parkBlocker字段又恢复为null。
所以,park(Object)型函数里必须要调用setBlocker函数两次。
3、parkNanos(Object blocker, long nanos)方法 和 parkNanos(long nanos)方法
java
public class LockSupport {
//阻塞当前线程nanos秒
public static void parkNanos(Object blocker, long nanos) {
//先判断nanos是否大于0,小于等于0都代表无限等待
if (nanos > 0) {
//获取当前线程
Thread t = Thread.currentThread();
//将当前线程的parkBlocker字段设置为blocker
setBlocker(t, blocker);
//阻塞当前线程现对时间的nanos秒
UNSAFE.park(false, nanos);
//将当前线程的parkBlocker字段设置为null
setBlocker(t, null);
}
}
//阻塞当前线程nanos秒,现对时间
public static void parkNanos(long nanos) {
if (nanos > 0)
UNSAFE.park(false, nanos);
}
}4、parkUntil(Object blocker, long deadline)方法 和 parkUntil(long deadline)方法
java
public class LockSupport {
//将当前线程阻塞绝对时间的deadline秒,并且将当前线程的parkBlockerOffset设置为blocker
public static void parkUntil(Object blocker, long deadline) {
//获取当前线程
Thread t = Thread.currentThread();
//设置当前线程parkBlocker字段设置为blocker
setBlocker(t, blocker);
//阻塞当前线程绝对时间的deadline秒
UNSAFE.park(true, deadline);
//当前线程parkBlocker字段设置为null
setBlocker(t, null);
}
//将当前线程阻塞绝对时间的deadline秒
public static void parkUntil(long deadline) {
UNSAFE.park(true, deadline);
}
}总结:
LockSupport 和 CAS 是Java并发包中很多并发工具控制机制的基础,它们底层其实都是依赖Unsafe实现。很多锁的类都是基于LockSupport的park和unpark来实现的,所以了解LockSupport类是非常重要的。
如果小假的内容对你有帮助,请点赞,评论,收藏。创作不易,大家的支持就是我坚持下去的动力!