1.环境介绍
开发板:野火imx6ullPro邮票孔EMMC
主机:Win11
虚拟机:virtualbox
虚拟机版本:Ubuntu20.04
Windows远程连接虚拟机
由于这个板子比较老,野火提供的虚拟机是基于18.04的这个版本不再支持vscode环境,于是就想着开始学习驱动从头到尾先搭建一下环境,中间也是折腾了很久,所以都记录一下
环境:
准备从SD卡加载uboot,通过tftp从Ubuntu中加载内核镜像,设备树,并通过nfs将根文件系统挂载到Ubuntu上
开发板直连电脑,虚拟机通过NAT连接无线网卡,保证虚拟机可以连接外网,桥接有线网卡,让有线网卡、Windows、开发板在同一局域网内
vscode通过SSH远程连接虚拟机,在Windows环境下开发比较舒服
2.虚拟机环境搭建,并配置SSH连接
可以看我这篇博客
创建虚拟机并配置远程环境
3.uboot编译
3.1源码下载
bash
#环境下载
sudo apt install make git gcc-arm-none-eabi gcc bison flex libssl-dev dpkg-dev lzop libncurses5-dev
#直接克隆野火提供的仓库
git clone -b ebf_v2020_10_imx https://gitee.com/Embedfire/ebf_linux_uboot --depth 13.2编译uboot
- 创建编译内核脚本
bash
touch build_uboot.sh
chmod 0777 build_uboot.sh- 向文件中写入如下内容
bash
make distclean
make ARCH=arm CROSS_COMPILE=arm-none-eabi- mx6ull_fire_mmc_defconfig- 查看生成的固件
bash
ls u-boot-dtb.imx3.3烧录uboot
- sd卡插到读卡器上,挂载到Ubuntu上
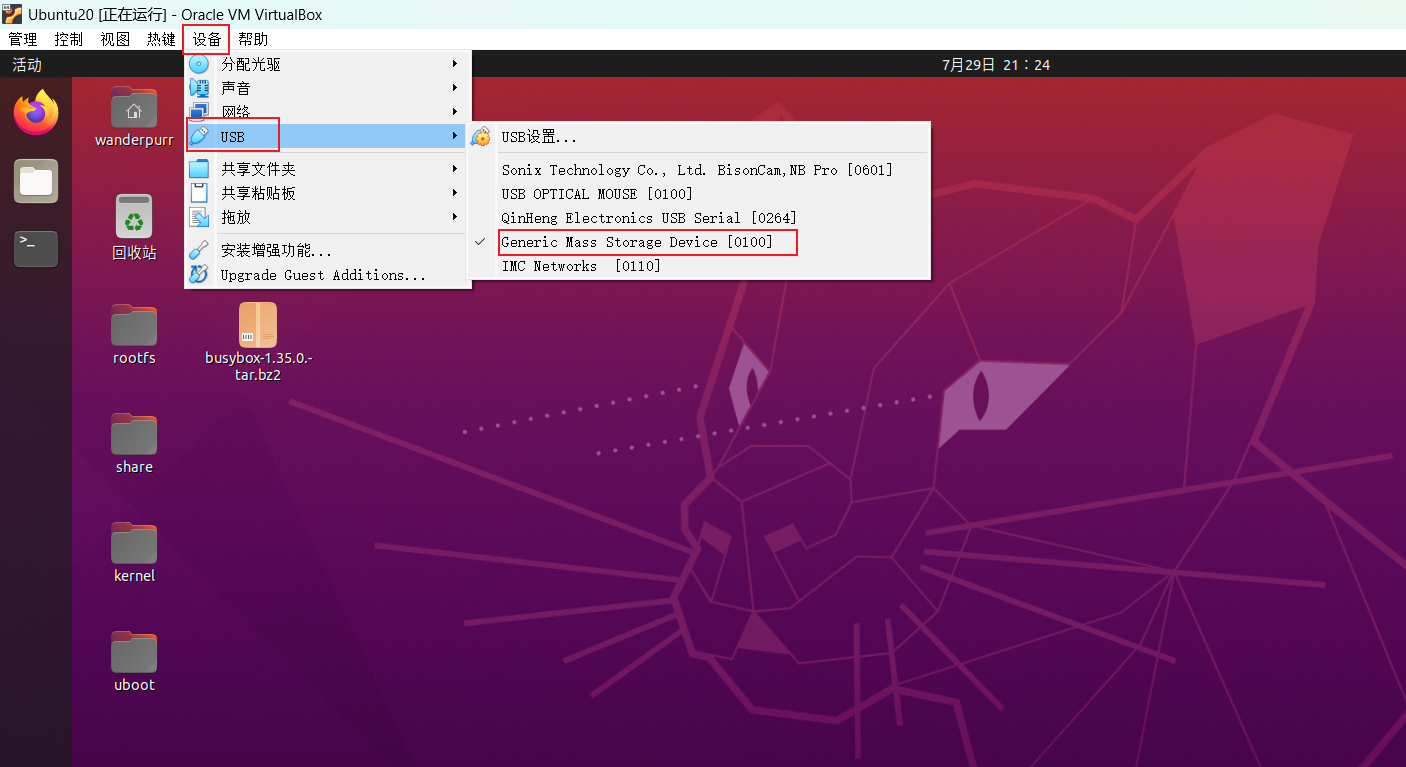
设备名称可能不一样,可以插拔读卡器看一下变化的是哪个,哪个就是我们的读卡器
- 查看Ubuntu上挂载的分区,输入lsblk
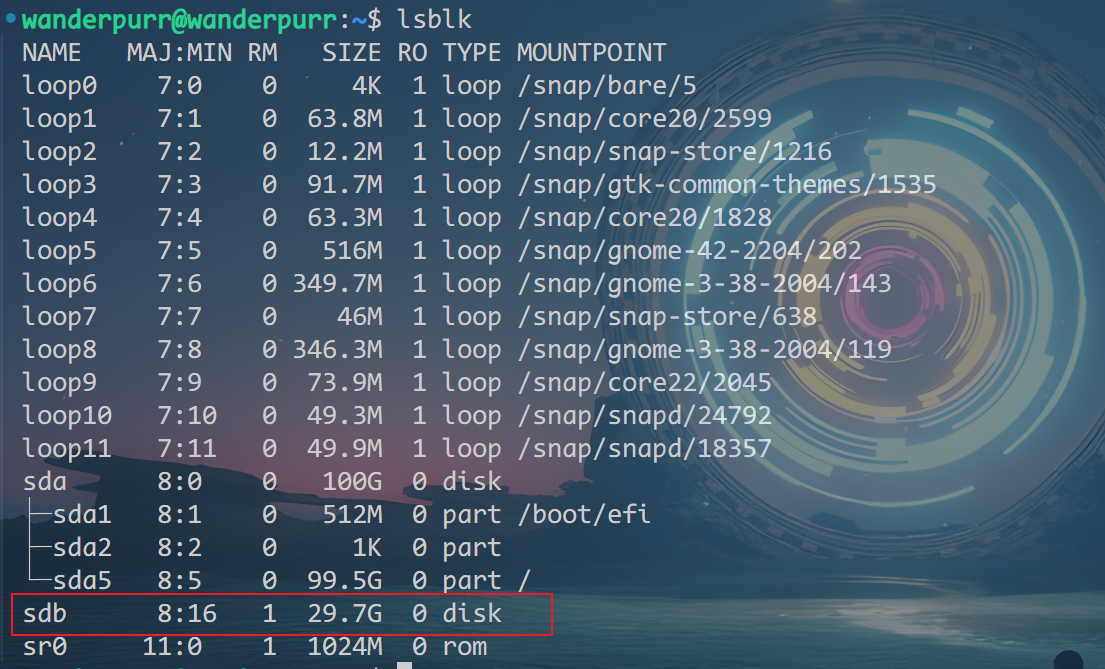
一般不会是sda,根据自己情况确定
- 进入uboot源码目录,执行如下命令
bash
sudo dd iflag=dsync oflag=dsync if=u-boot-dtb.imx of=/dev/sdb seek=2- 取下设备将SD卡插入开发板就能看到uboot启动了
4.网络环境搭建
开发板,主机和虚拟机可以通过网线通信,需要设置三者有共同的网关和掩码,三者在同一网段的不同ip
操作之前关闭电脑所有电脑管家以及防火墙
4.1Windows网络配置
-
打开控制面板->网络和Internet->网络和共享中心->更改适配器设置,找到我们的有线网卡
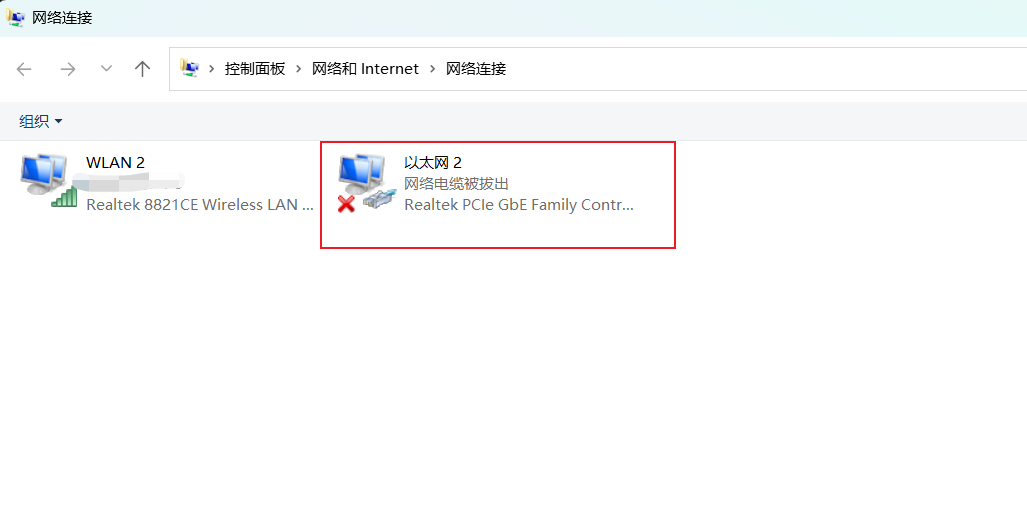
-
右键属性->Internet协议版本4(TCP/IPV4)
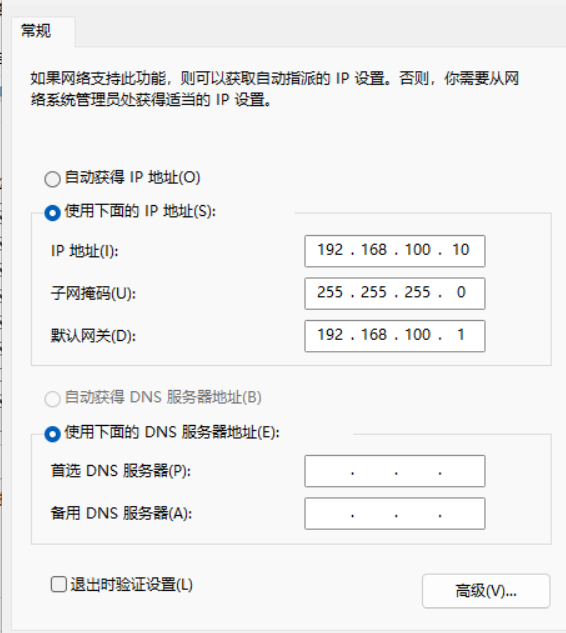
可随意配置网段,只要保证三者在同一网段即可,不懂得可以按照我的配置
4.2Ubuntu网络配置
-
Ubuntu关机,添加网卡选择桥接模式,桥接的网卡一定是上边配置的有线网卡名字
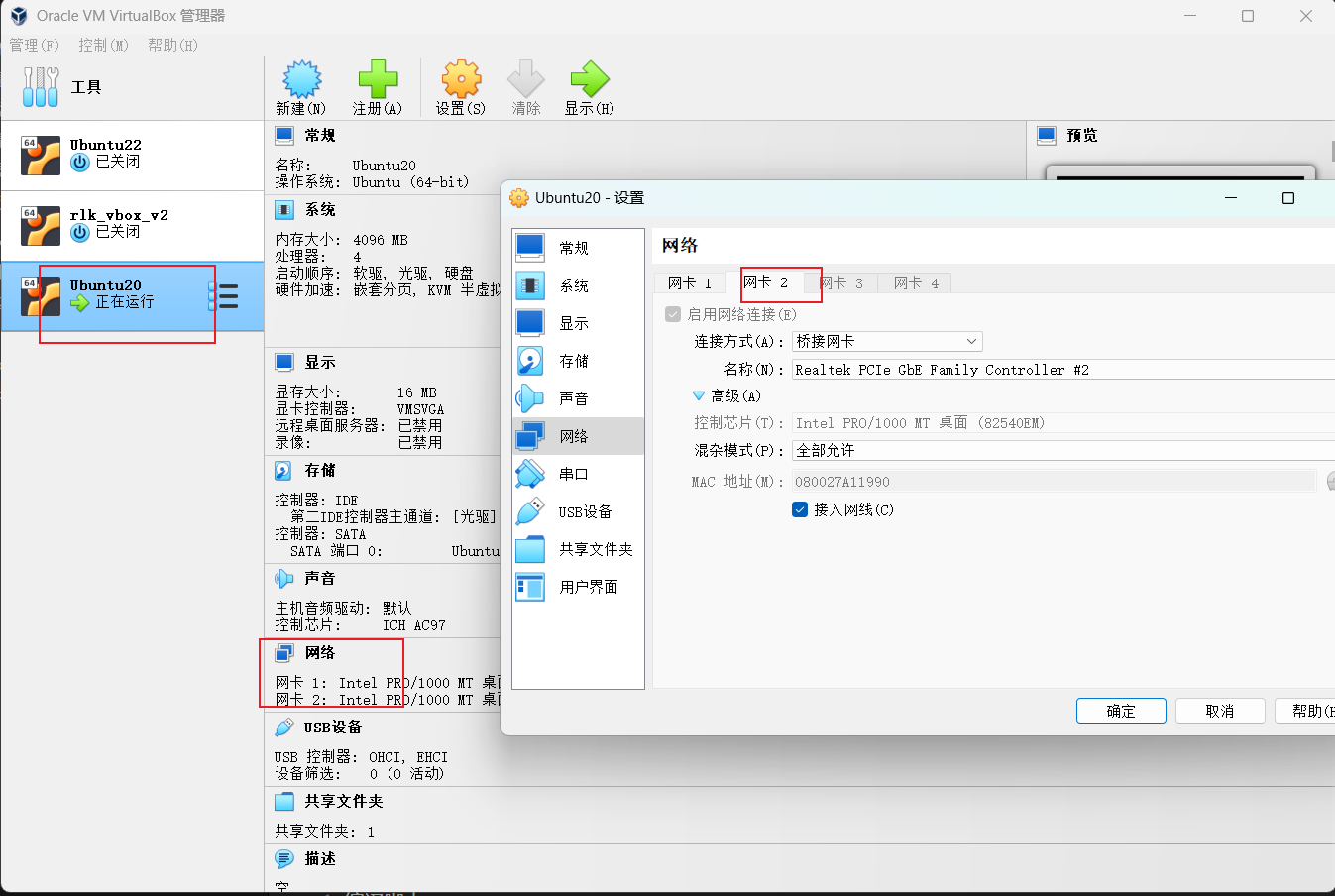
-
进入虚拟机网络配置
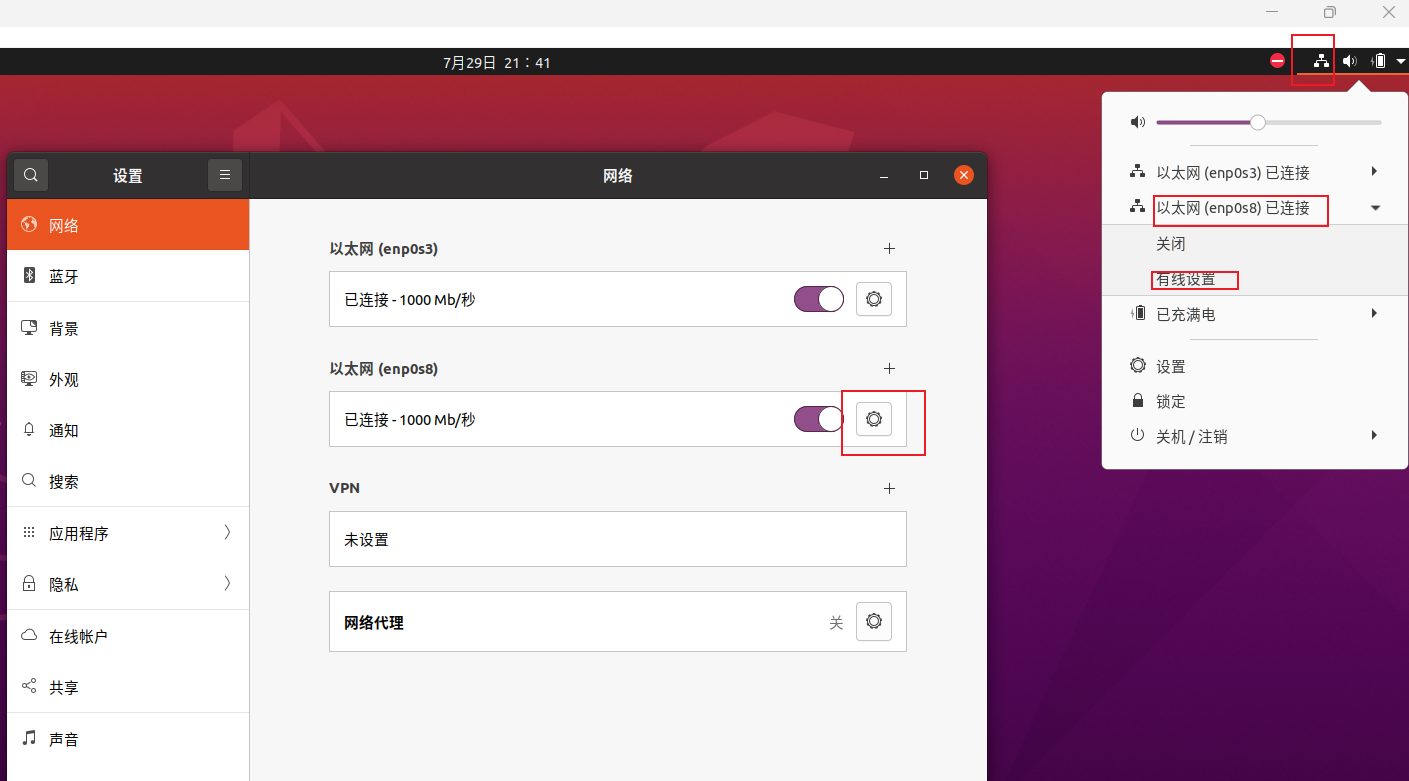
-
配置网络
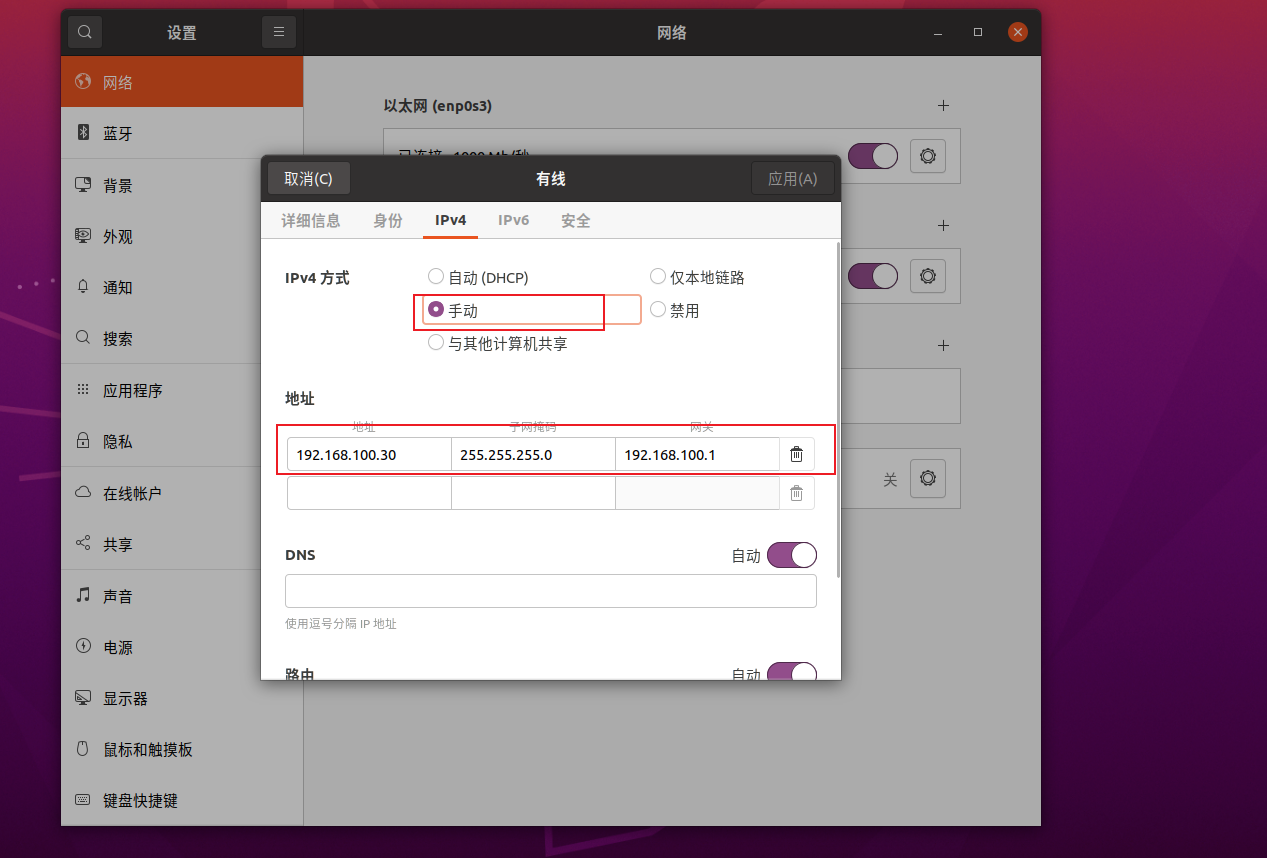
-
验证网络
虚拟机终端输入ifconfig,查看是否有我们配置的网络
4.3开发板网络配置
开发板进入uboot,输入如下命令
bash
setenv ipaddr 192.168.100.30
setenv ethaddr 00:04:9f:04:d2:35
setenv gatewayip 192.168.100.1
setenv netmask 255.255.255.0
setenv serverip 192.168.100.30
saveenv 分别是ip地址,mac地址,网关,掩码,虚拟机ip,保存环境变量
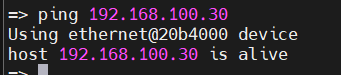
验证能与虚拟机跑通
bash
ping 192.168.100.30显示如下即可
5.kernel编译
5.1源码下载
bash
#环境下载
sudo apt install gcc-arm-linux-gnueabihf
#直接克隆野火提供的内核仓库
git clone -b ebf_4.19.35_imx6ul https://github.com/Embedfire/ebf_linux_kernel.git --depth 15.2编译内核
- 编译脚本
bash
#进入内核后执行
touch build_kernel.sh
chmod 0777 build_kernel.sh- 向build_kernel.sh中写入
bash
#清除编译
make mrproper
# 编译内核
make ARCH=arm npi_v7_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j3- 查看内核和设备树
bash
#应该会出现这两个文件,记住这两个文件位置
ls arch/arm/boot/zImage
ls arch/arm/boot/dts/imx6ull-mmc-npi.dtb6.tftp加载内核和设备树
- 安装环境
bash
sudo apt-get install tftp-hpa tftpd-hpa
sudo apt-get install xinetd- 创建目录
bash
cd ~
mkdir tftp
chmod 0777 tftp-
配置TFTP
sudo vim /etc/xinetd.d/tftp
输入如下内容,路径根据自己的来,要绝对路径
server tftp
{
socket_type = dgram
protocol = udp
wait = yes
user = root
server = /usr/sbin/in.tftpd
server_args = -s /home/wanderpurr/tftp/
disable = no
per_source = 11
cps = 100 2
flags = IPv4
} -
重启TFTP服务
bash
sudo service tftpd-hpa start- 重置服务器
bash
sudo vim /etc/default/tftpd-hpa
# 修改成如下内容,路径还是按自己的来
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/home/wanderpurr/tftp"
TFTP_ADDRESS=":69"
TFTP_OPTIONS="-l -c -s"- 重启TFTP服务
bash
sudo service tftpd-hpa restart- 将上边我们编译生成的内核镜像和设备树拷贝到我们的tftp目录
- 修改内核和设备树权限为777
- 测试加载镜像,在uboot中输入如下内容重启
bash
setenv bootcmd 'tftp 80800000 zImage; tftp 83000000 imx6ull-mmc-npi.dtb; bootz 80800000 - 83000000'
saveenv重启后会看到如下
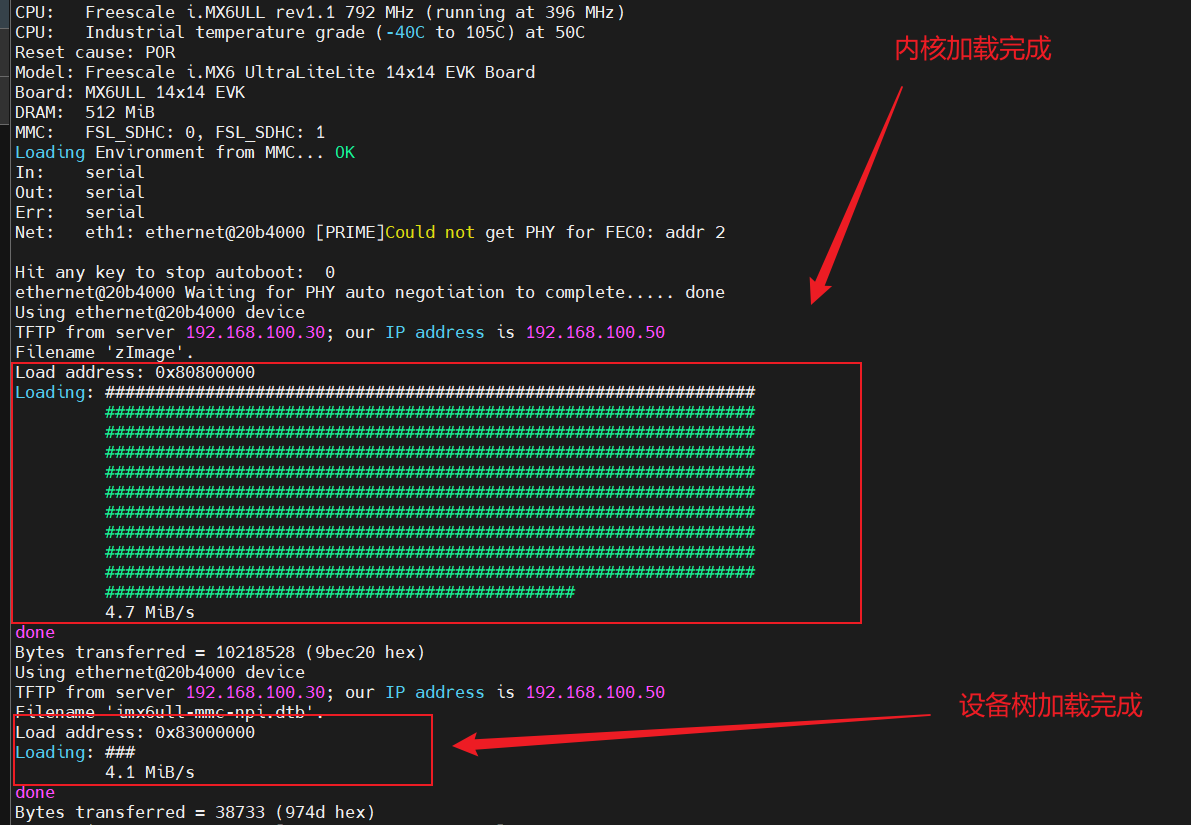
后面会启动内核,但缺少根文件系统会启动失败
7.根文件系统编译
- 下载源码安装环境
源码可以去官网下载即可busybox官网,根文件系统不向内核和uboot有很多板级配置需要向供应商所要指定版本
安装环境
bash
sudo apt-get install zlib1g-dev unzip gcc g++ aptitude lib32stdc++6-4.8-dbg build-essential libncurses5 libncurses5-dev u-boot-tools traceroute gcc-arm-linux-gnueabihf g++-arm-linux-gnueabihf -y- 配置根文件系统
bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig配置如下操作
- Settings -> Build static binary (no shared libs) 勾选上
- Linux System Utilities->mdev 勾选上
- Settings -> vi-style line editing commands 勾选上
- Linux Module Utilities -> Simplified modutils 取消勾选
- 编译
bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-
#指定安装路径为家目录下rootfs
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- CONFIG_PREFIX=/home/wanderpurr/rootfs install - 补全缺失文件
bash
cd ~/rootfs
mkdir dev etc lib var proc tmp home root mnt sys
cd ./dev
sudo mknod console c 5 1
sudo mknod null c 1 3
cd ../etc
echo console::askfirst:-/bin/sh > inittab8.nfs挂载根文件系统
上边已经将根文件系统制作好了,下面来通过网线挂载起来
- 安装环境
bash
sudo apt-get install nfs-kernel-server rpcbind- 添加根文件系统
bash
sudo echo "/home/wanderpurr/rootfs *(rw,sync,no_root_squash,no_subtree_check)" >> /etc/exports- 重启nfs
bash
sudo /etc/init.d/nfs-kernel-server restart- 修改uboot参数
bash
#板子IP,虚拟机IP以及根文件系统路径根据自己的配置好
setenv bootargs 'console=ttymxc0,115200 root=/dev/nfs nfsroot=192.168.100.30:/home/wanderpurr/rootfs,proto=tcp,nfsvers=4 rw ip=192.168.100.50:192.168.100.30:192.168.100.1:255.255.255.0::eth0:off'
saveenv- 重启开发板
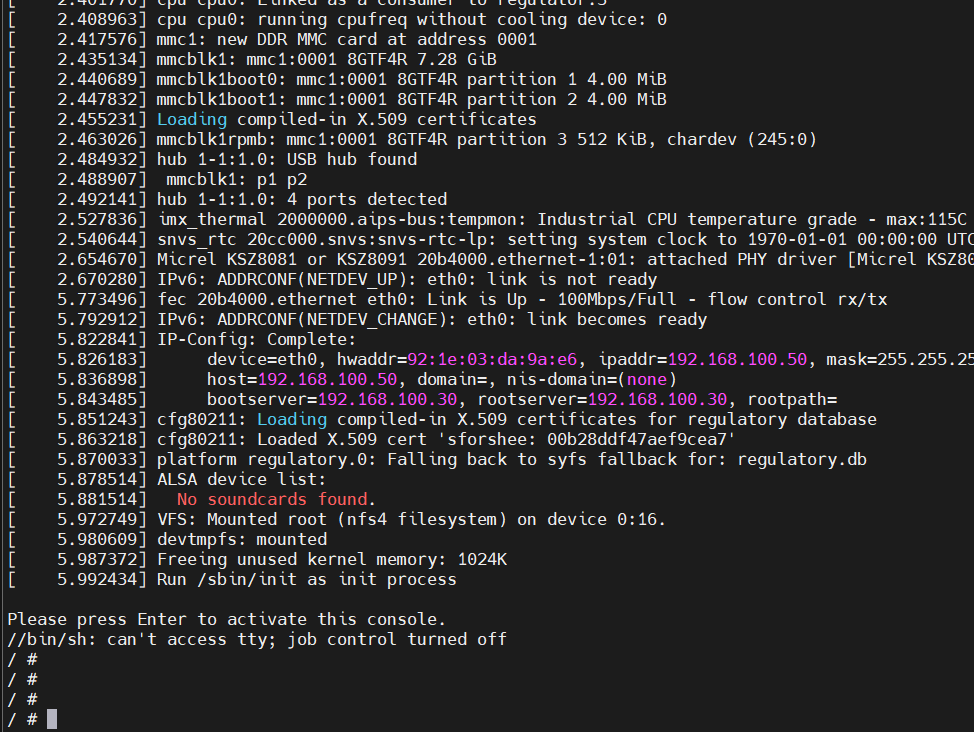
这里就配置结束了,我们开发板的根目录就是虚拟机的rootfs目录,这样传输文件就非常方便了
结语
配置过程中可能出现很多问题,我断断续续搞了一周,但每填一个坑都是对自己的一种成长
参考:
这个写的非常全,有需要从头自己配置的可以参考一下这个,但注意他bootargs最后网口挖了坑,让我找了好几天
i.MX6ULL开发板uboot/kernel/rootfs移植傻瓜教程【建议收藏】-电子工程专辑
有问题欢迎留言