第二章方案设计与论证
2.1方案设计
Crazyflie无人机设计如图2-1所示,该系统主要由Crazyflie无人机平台、传感器模块、控制模块、通信模块、电源模块以及上位机等构成。该系统能够实现对目标的实时追踪与定位,具备体积小巧、灵活性高、功耗低等特点,适用于多种复杂环境下的追踪任务。
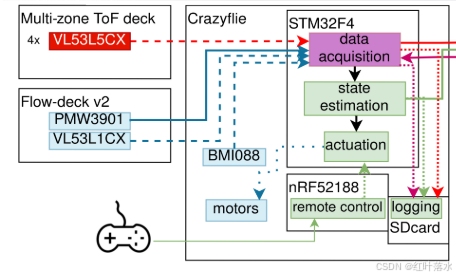
图2-1 Crazyflie 方案设计图
本设计的AI模块GD32H759IMT6作为主控制器,它提供了多种外设资源和扩展接口,适用于各种应用开发和性能测试。GD32H759IMK6 是兆易创新推出的高性能微控制器,采用 Arm® Cortex®-M7 内核,主频高达 600MHz,具备卓越的处理能效和丰富的外设资源。该芯片适用于多种高级应用,包括数字信号处理、电机变频、电源管理、储能系统、无人机、音频视频处理、图形图像处理等。此外,GD32H759IMT6 还支持机器学习和人工智能等高端创新场景。
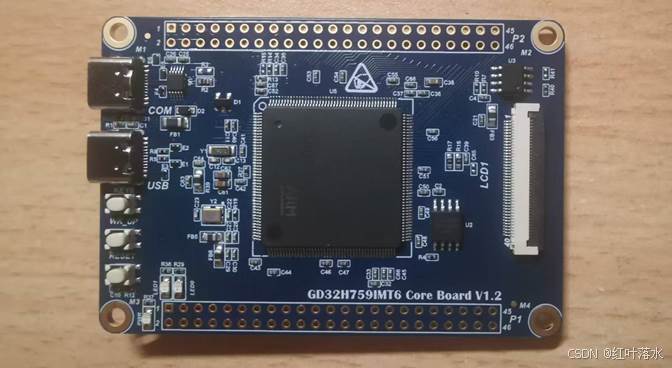
图2-2 GD32H759IMT6-AI板
2.2 功能指标
本系统由主要由两部分组成,分别为无人机平台与上位机控制系统。
其中,无人机平台可以实现目标的实时追踪与定位,具备自主飞行能力,能够根据目标位置调整飞行姿态与速度,最大飞行速度可达数米每秒,续航时间约为5-10分钟。
无人机平台配备多种传感器,如摄像头、IMU(惯性测量单元)等,摄像头用于获取目标图像信息,IMU用于测量无人机的姿态和运动信息,辅助控制无人机的飞行姿态。
无人机平台具有通信模块,用于与上位机进行数据传输,包括图像数据、控制指令等,通信距离可达数十米。
上位机系统可以设置无人机的飞行参数,如飞行速度、追踪目标等,并实时接收无人机传回的图像与数据信息,对追踪过程进行监控与调整。
2.3方案论证
(1)MCU选型
表2-1 MCU性能对比
|---------|-------------|---------------|
| 指标/MCU | STM32F405 | STM32F103RCT6 |
| 主频 | 168MHz | 72MHz |
| 内核 | Cortex-M4 | Cortex-M3 |
| 闪存 | 1MB | 256KB |
| 内核电压(V) | 1.2V | 1.8V |
| ADC速率 | 3.3MSa/s | 1MSa/s |
| 运行功耗 | 24.5mA/108M | 52.4mA/72M |
由表2-1可得STM32F405的性能优于STM32F103RCT6,STM32F405采用了最新Cortex®-M4内核相比Cortex®-M3产品更提高30%。电压域支持高级电压管理功能,使得芯片在所有外设全速运行模式下的最大工作电流仅为380µA/MHz,电池供电时的RTC待机电流仅为0.8µA,在确保高性能的同时实现了最佳的能耗比。因此本设计选用STM32F405作为主控芯片。
2.4作品难点
(1)AI追踪算法需要在有限的计算资源下实现快速、准确的目标追踪,这对算法的优化提出了很高的要求。需要对算法进行简化与优化,以适应Crazyflie 2.1的硬件条件,同时保证追踪的精度与实时性。
(2)Crazyflie 2.1配备多种传感器,如何将这些传感器的数据进行有效融合,以提高追踪的精度与可靠性,是一个难点问题。需要设计合理的数据融合算法,充分利用各传感器的优势,实现对目标的精准定位。
(3)在复杂环境下,如强风、狭小空间等,无人机的飞行稳定性会受到很大影响。需要对控制算法进行优化,提高无人机的抗干扰能力,保证在复杂环境下的稳定飞行与准确追踪。
(4)追踪过程中需要实时传输大量的图像与数据信息,这对通信模块的性能提出了很高的要求。同时,上位机需要对这些数据进行快速处理与分析,以实现对追踪过程的实时监控与调整,这对上位机的处理能力也是一个挑战。
第三章 硬件介绍
3.1硬件框架及模块介绍
Crazyflie纳型无人机追踪系统的硬件组成如图3-1所示,采用Crazyflie 2.1无人机平台作为基础,其主要硬件模块包括主控模块、传感器模块、通信模块、电源模块以及扩展模块。该系统通过各模块的协同工作,实现对目标的实时追踪与定位。
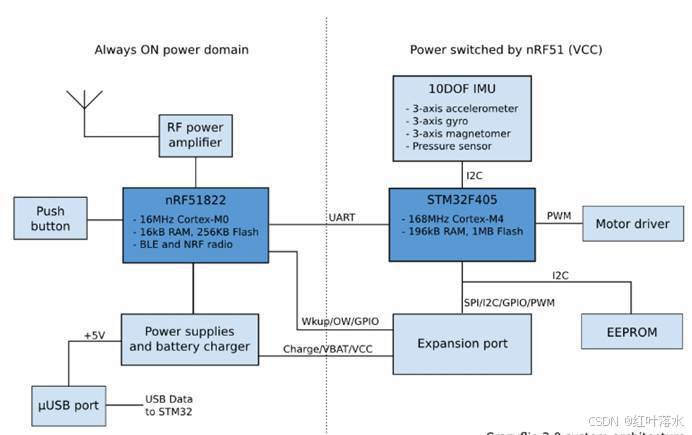
图3-1 CrazyFlie纳型无人机硬件架构
3.2电路原理介绍
(1)无人机采用STM32F405作为主控芯片,该芯片具备高性能、低功耗的特点,能够满足无人机的飞行控制需求。其主要特性如下:
主频:168MHz,支持高性能处理。
内核:Cortex-M4,支持浮点运算,适合复杂的控制算法。
闪存:512KB,足够的存储空间用于程序和数据存储。
ADC速率:2.4 MSPS或7.2 MSPS(交错模式),能够快速采集传感器数据。
运行功耗:238 µA/MHz(@ 168 MHz),在保证性能的同时实现低功耗运行。
(2)GD32H759IMT6 是兆易创新推出的高性能32位微控制器,采用 Arm® Cortex®-M7 内核,主频高达 600MHz,具备卓越的处理能效和丰富的外设资源。该芯片适用于多种高级应用,包括数字信号处理、电机变频、电源管理、储能系统、无人机、音频视频处理、图形图像处理等。此外,GD32H759IMT6 还支持机器学习和人工智能等高端创新场景。
- 技术参数
内核:Arm® Cortex®-M7
主频:600MHz
存储:
Flash:3840KB
SRAM:1024KB
封装:LQFP176
温度范围:-40℃ 至 85℃
外设接口:
8个USART和UART
4个I2C
6个SPI
4个I2S
3个CAN-FD
2个以太网
USB2.0 FS和HS通信
2个采样率高达4MSPS的14位ADC
1个采样率高达5.3MSPS的12位ADC
TFT LCD液晶驱动器和图形处理加速器IPA
串行音频接口SAI和SPDIF音频接口
8位至14位的数字摄像头接口
3.3主要问题及解决方案
(1)高频模块容易受干扰
在实际应用中,高频模块容易受到外界电磁干扰,影响信号的稳定性和准确性。为此,在PCB设计时,将高频模块与其他模块进行隔离,避免相互干扰。同时,采用屏蔽措施,如使用金属外壳对高频模块进行屏蔽,减少外界干扰。
(2)功耗优化
Crazyflie 2.1的续航时间有限,因此需要对系统进行功耗优化。通过合理配置主控芯片的工作模式,降低其运行功耗。同时,优化传感器模块的采样频率,减少不必要的数据采集,降低功耗。此外,采用低功耗的通信模块和电源管理芯片,进一步降低系统的整体功耗。
(3)传感器数据融合
Crazyflie 2.1配备多种传感器,如何将这些传感器的数据进行有效融合,以提高追踪的精度与可靠性,是一个难点问题。为此,设计了合理的数据融合算法,充分利用各传感器的优势,实现对目标的精准定位。例如,结合IMU和ToF传感器的数据,提高无人机的姿态控制精度;结合摄像头和ToF传感器的数据,提高目标的定位精度。
(4) 复杂环境下的飞行稳定性
在复杂环境下,如强风、狭小空间等,无人机的飞行稳定性会受到很大影响。为此,对控制算法进行优化,提高无人机的抗干扰能力。例如,采用自适应控制算法,根据环境变化自动调整控制参数,保证无人机的稳定飞行。同时,增加避障功能,通过ToF传感器实时检测障碍物,避免碰撞。