基于QT+HALCON的通用机器视觉框架软件:优势与实现要点
在机器视觉领域,将QT 的跨平台界面优势与HALCON的强大算法库结合,能开发出兼具易用性与专业性的通用框架。这类框架可快速适配各类检测场景,降低二次开发成本,是工业自动化与视觉检测的理想选择。可学习参考,也可略做修改,用在自己的项目上。
核心组件与功能划分
通用机器视觉框架需兼顾灵活性与专业性,以下是基于QT+HALCON的典型模块划分:
| 模块名称 | 功能描述 | QT的角色 | HALCON的角色 |
|---|---|---|---|
| 设备管理 | 相机、光源等硬件的连接与参数配置 | 提供设备交互界面、参数设置窗口 | 支持主流相机接口(GigE Vision等) |
| 图像采集 | 实时图像获取与缓存 | 多线程控制避免界面卡顿 | 图像格式转换与初步处理 |
| 图像处理 | 滤波、分割、特征提取等算法应用 | 算法参数调节界面、结果可视化 | 提供核心算法库(如边缘检测、模板匹配) |
| 结果分析 | 检测结果的判定与数据统计 | 数据表格展示、图表生成 | 测量数据计算(距离、角度等) |
| 脚本与配置 | 检测流程的保存与复用 | 配置文件管理界面 | 算法流程序列化 |
关键技术与实现要点
1. QT与HALCON的接口融合
- 图像数据交互 :QT的
QImage与HALCON的HObject需通过内存共享实现高效转换,避免数据拷贝耗时。 - 多线程设计 :用QT的
QThread将图像采集与处理放在后台线程,主线程仅负责界面更新,确保实时性。
2. 算法模块化设计
-
将常用算法封装为独立类(如
HImageFilter、HTemplateMatch),通过QT的信号与槽机制实现模块间通信。 -
示例代码结构:
cpp// 模板匹配模块(简化) class HTemplateMatcher { public: HObject templateImage; void trainTemplate(const HObject& img); // HALCON模板训练 QRect matchImage(const HObject& img); // 匹配并返回QT可识别的区域 };
3. 跨平台与扩展性
- 利用QT的跨平台特性,框架可在Windows、Linux等系统运行,适配不同工业环境。
- 通过插件机制(QT的
QPluginLoader)支持算法扩展,用户可自定义HALCON算法插件。
开发流程与最佳实践
1. 快速搭建框架骨架
- 用QT Creator创建工程,选择QMainWindow作为主界面。
- 集成HALCON库:在
.pro文件中添加库路径与头文件目录。 - 设计基础界面:包含菜单栏(文件操作)、工具栏(常用功能)、中央面板(图像显示)。
2. 图像显示与交互优化
- 使用HALCON的
HWindowControl控件嵌入QT界面,实现图像实时显示。 - 通过QT的
QGraphicsView叠加检测结果标注(如矩形、文字),提升可视化效果。
3. 性能优化技巧
- 算法加速:对耗时算法(如深度学习推理),利用HALCON的GPU加速功能。
- 内存管理 :及时释放HALCON的
HObject资源,避免内存泄漏(可结合QT的智能指针)。
推荐开发环境
QT5.12或QT5.14+halcon+VS2019
QT+HALCON框架的核心价值
基于QT+HALCON的通用机器视觉框架,既能通过QT 提供友好的人机交互与跨平台能力,又能借助HALCON的专业算法库实现高精度视觉检测。其模块化设计让开发者可快速适配不同场景,降低从0开发的成本,是平衡易用性与专业性的最优方案。对于工业自动化领域,这类框架能有效提升检测效率与准确性,推动视觉技术的规模化应用。可学习参考,也可略做修改,用在自己的项目上。
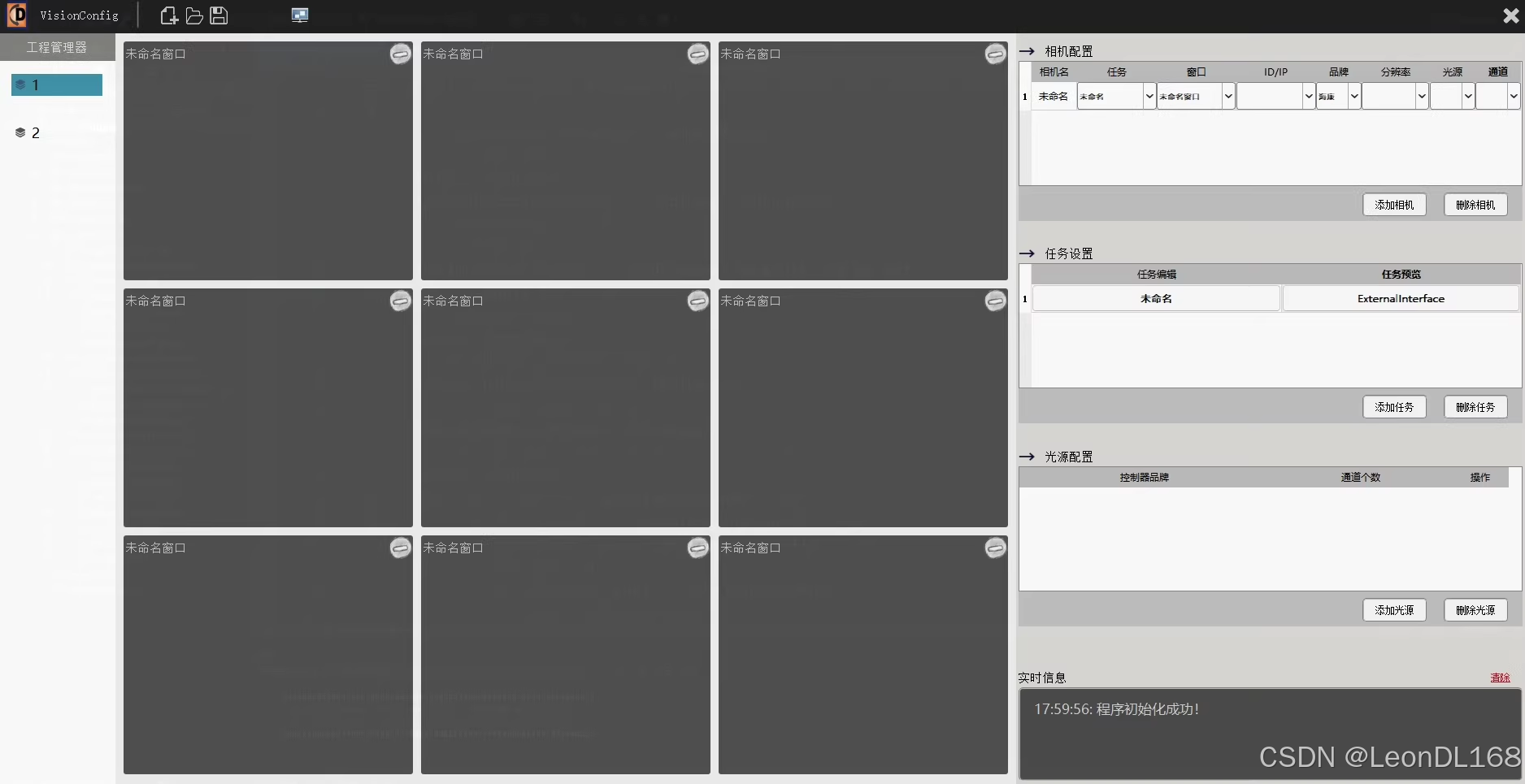
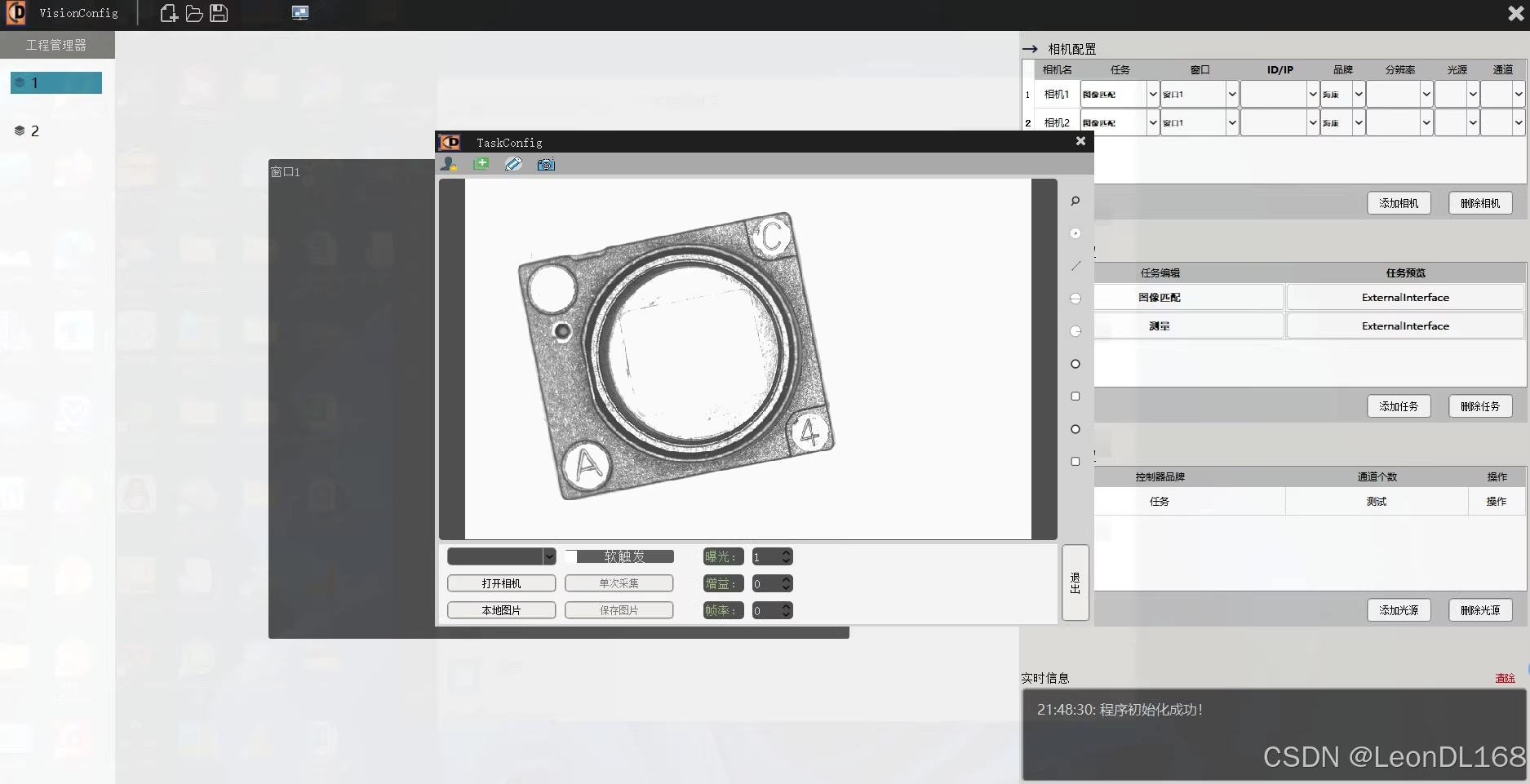
运行界面:



**需要源码请私信或者自行下载点击即可下载