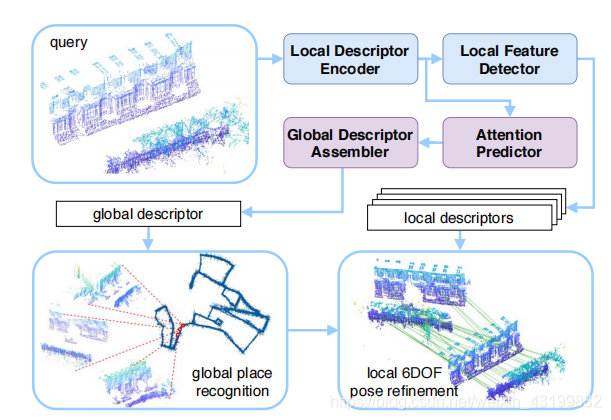
1、DH3D: Deep Hierarchical 3D Descriptors for Robust Large-Scale 6DoF Relocalization
这是一篇训练点云的文章,在训练出local descriptor之后,通过聚类的方法得出global descriptor,并且提出了hierarchical network,使得local descriptor和global descriptor可以通过一个网络得到,通过共享计算降低了网络的复杂度,从而加快计算和训练。
2、RoRD: Rotation-Robust Descriptors and Orthographic Views for Local Feature Matching
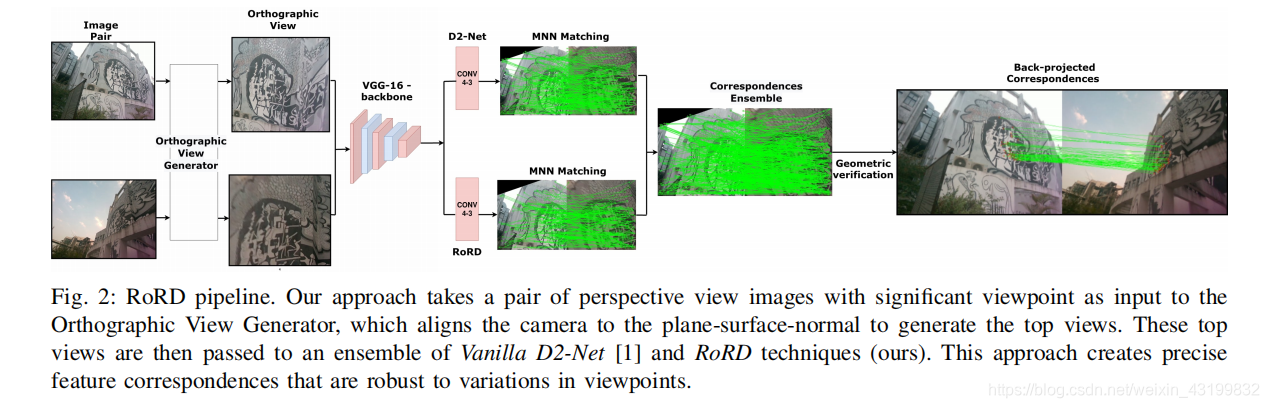
使用VGG作为主干网络,然后一半使用D2-net,另一半使用RoRD网络,RoRD网络会给原始图片一个较大的旋转,以提高所训练出的描述子的旋转不变性,D2-net可以保证在旋转较小或者没有旋转的时候,描述子依然可以很好地进行匹配。然后整合两种描述子。
3、DF-SLAM: A Deep-Learning Enhanced Visual SLAM System based on Deep Local Features
未找到相关代码
主要思想:Tfeat(论文链接、代码链接)结构+Hardnet(论文链接)提出的negative mining strategy
loss function:
采样策略通过L2成对距离矩阵在批次中选择最接近的不匹配patch。首先是生成一堆匹配好的局部patch,对一块patch中的指定anchor,只能一个可以匹配的patch。定义距离矩阵 D = d i j D={d_{ij}} D=dij.表示第 i i i个anchor patch描述子到第 j j j个postive patch描述子。
从而,hardest negative patch distance可以通过下式进行计算:
d n = m i n ( a k m i n , p j m i n ) d_n=min(a_{k_{min}},p_{j_{min}}) dn=min(akmin,pjmin)
这里, a k m i n a_{k_{min}} akmin表示到anchor patch最近的patch, p j m i n p_{j_{min}} pjmin表示到positive patch最近的patch。
从而定义损失函数:

这里, a i a_i ai表示anchor描述子, p i p_i pi是positive描述子。
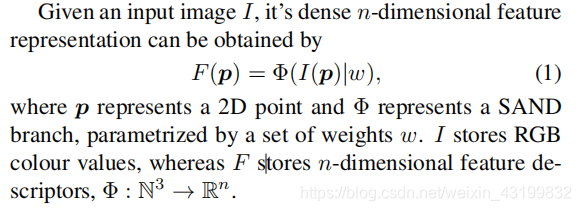
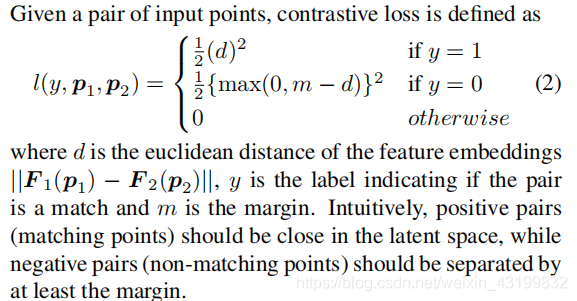
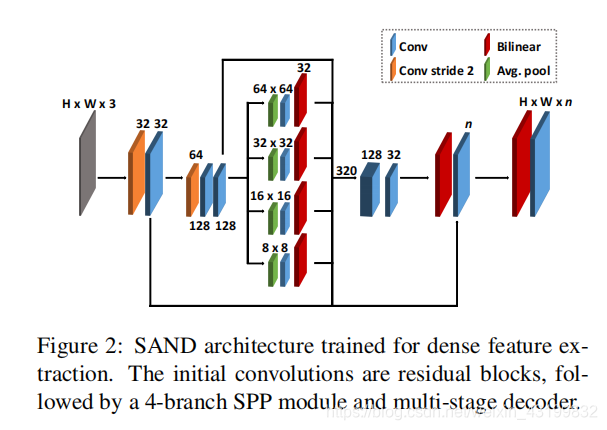
4、Scale-Adaptive Neural Dense Features: Learning via Hierarchical Context Aggregation
主要模型框架:
Pixel-wise Contrastive Loss: