AI可以帮助我们找到问题的解决方案,比如:导航应用程序中帮我们规划从出发地到目的地的最佳路线、玩游戏时规划好下一步动作以提高胜率。
本节的搜索问题涉及到一个被赋予初始状态和目标状态的代理(Agent),该代理则需要返回一个从初始状态达到目标状态的解决方案。
例如导航就使用了典型的搜索过程,其中,代理(程序的思考部分)接收用户的当前位置(起点)和目的地作为输入,再根据搜索算法得出并返回一条推荐的路线。不过还有许多其他形式的搜索问题,例如拼图和迷宫。
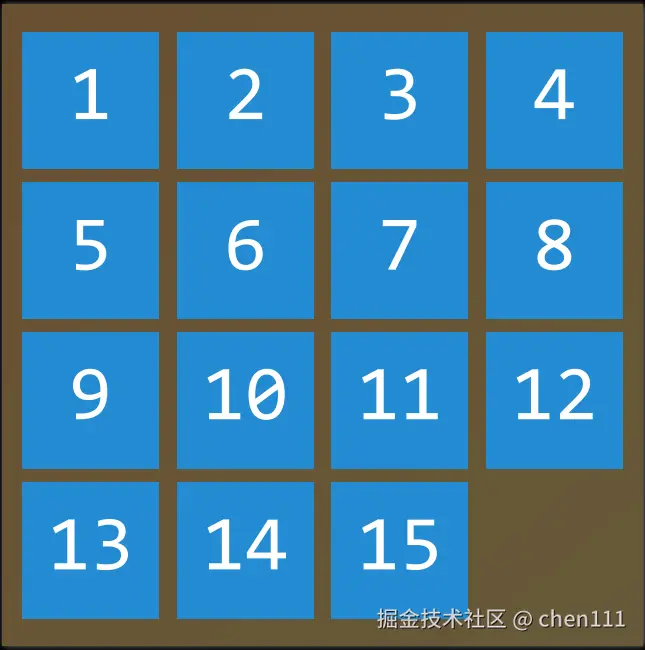
我们以15拼图来举例,如图:
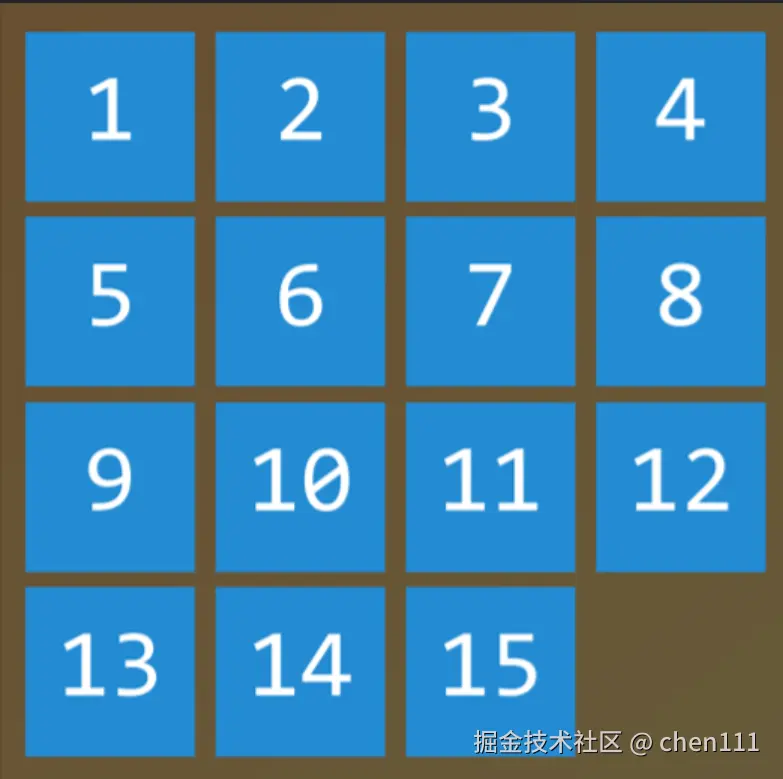 该游戏的规则是:在15块拼图打乱顺序的基础上,通过滑动拼图(上下左右)将这15块拼图按数字从小到大的顺序还原成上图所示。
该游戏的规则是:在15块拼图打乱顺序的基础上,通过滑动拼图(上下左右)将这15块拼图按数字从小到大的顺序还原成上图所示。
要解出15拼图,就需要用到搜索算法。
在分析解决方案前,我们需要引入一些术语。
术语
代理(Agent)
我们首先需要考虑的是代理 (Agent)------ 是感知其环境的某个实体,它能够以某种方式感知周围的事物,并以某种方式对该环境采取行动。
例如:在导航中,我们的代理可能是汽车的一种表示形式,它会根据我们的当前位置、地图信息、路况等来帮助我们决定下一步走哪条路;游戏里的NPC敌人也是一种代理,它会不断观察玩家的位置,并决定是追击、躲避还是攻击。
而在上面15拼图的情况下,代理(Agent)可能是AI或试图解决这个谜题的人,通过观察来弄清楚要移动哪些图块才能找到该解决方案。
其感知的环境则称为状态 (State),接下来我们介绍状态的概念。
状态(State)
状态则是代理在某一时刻的环境配置。
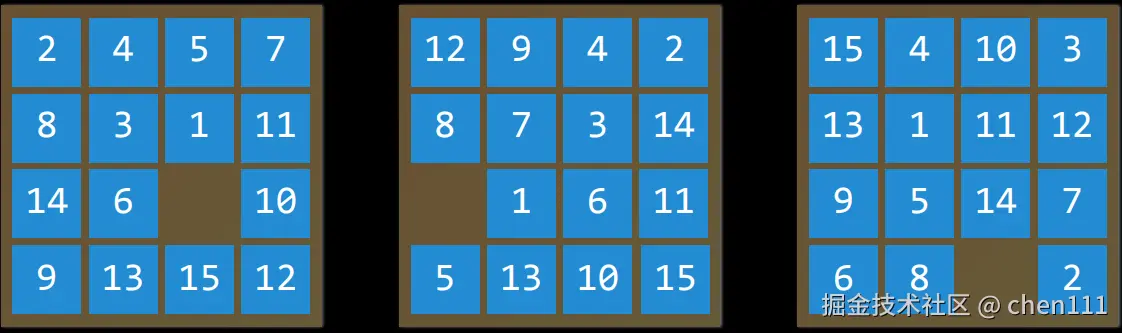
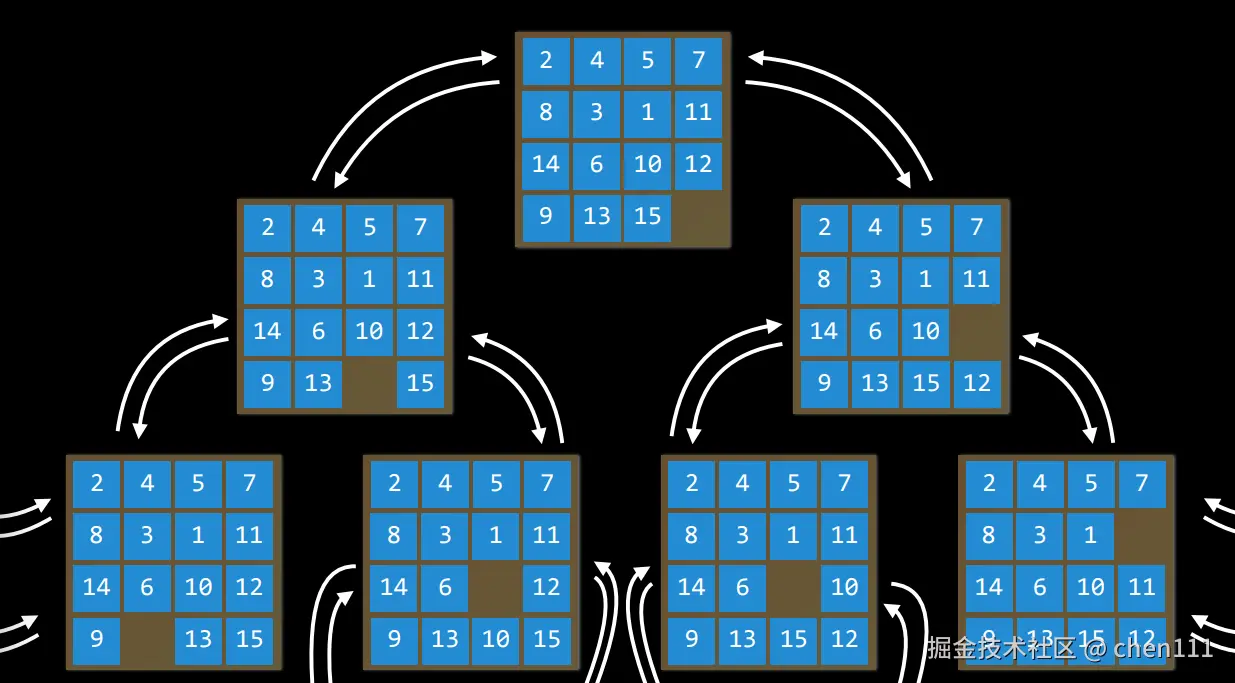
例如:在15拼图中,状态是所有数字排列在棋盘上的任意一种方式。(下图则是棋盘可能存在的3种状态)
 初始状态 (Initial State)则是搜索算法开始的状态。例如在导航中,Initial State就表示当前位置(起点)。
初始状态 (Initial State)则是搜索算法开始的状态。例如在导航中,Initial State就表示当前位置(起点)。
我们将从这个初始状态开始,然后推理,思考我们可以采取哪些行动才能从初始状态到目标状态。我们如何从初始状态到达目标?归根结底,需要通过采取行动。
动作(Action)
Action是我们在任意给定状态下做出的选择。就上文中提到的15拼图而言,我们首先通过初始状态来决定一个拼图往一个方向移动,移动后就更新成另一种状态,然后再根据新的状态来决定下一次的动作。一直重复这个步骤,直到达到目标。所以这将是一个反复出现的步骤,我们不如将其更精确地定义为函数,以便反复使用。
因此,我们定义了一个名为 Actions 的函数 ------ Action(s)
其输入值 s 则表示目前所处的状态,而其返回值则是在该状态下可能执行的动作的集合。
例如,拿下图来说:
该图上15张拼图的顺序作为此刻的状态输入到Action函数中,输出为两个可能执行的动作,即:15号拼图向右移动、12号拼图向下移动。
当我们执行了动作后,又会得到一个新的状态,我们把这种新的状态称作状态转移模型(Transition Model)。
状态转移模型(Transition Model)
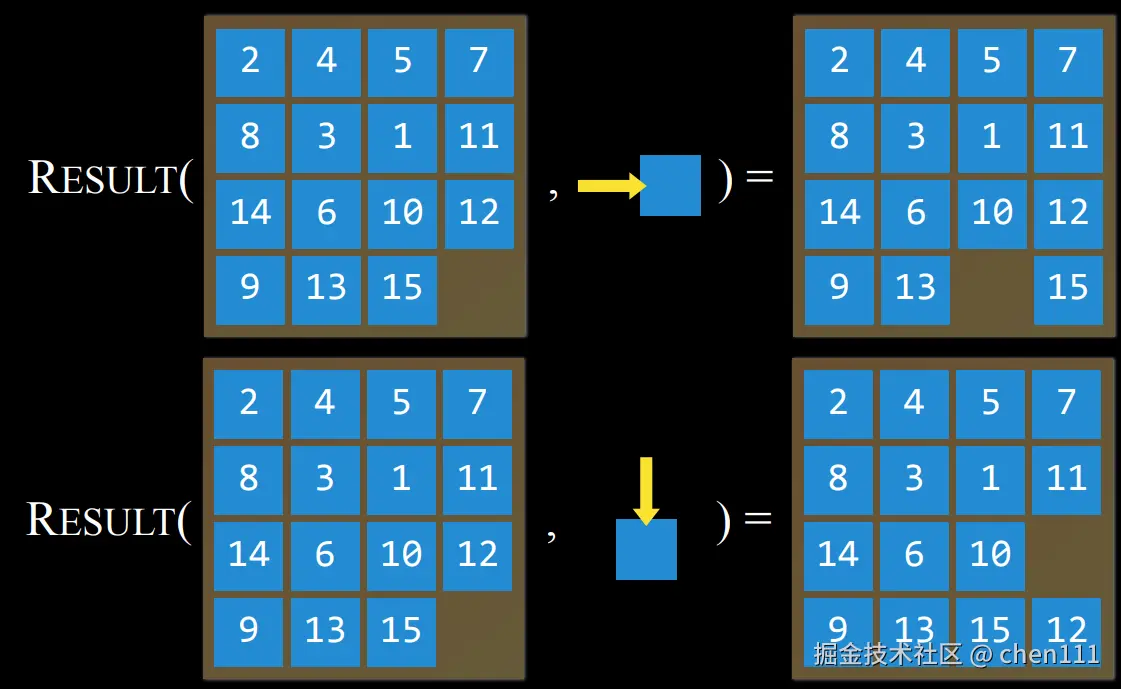
描述在任意状态下执行某个动作的结果。同理,也可以将状态转移模型定义成一个函数 ------ Result(s, a) ,以当前状态 s 和执行的动作 a 作为输入,以执行动作后呈现的新的状态作为输出。例如:
 状态转移模型描述了状态和动作是如何相互关联的。
状态转移模型描述了状态和动作是如何相互关联的。
而从初始状态出发,通过任意一系列动作得出的Result函数的返回值的集合,就称为状态空间(State Space)。
状态空间(State Space)
从初始状态出发,通过一系列动作能得出的所有状态的集合,就称作 State Space。 通常,为了简单起见,我们会以图的方式来展示整个事件 由于我们可以在前后两个动作之间相互切换,也就是我可以从第一步到第二步,又能从第二步回到第一步,所以,可以将State Space可视化为有向图,节点表示为不同的状态,每个节点间的双向箭头就表示为动作。
 这是部分State Space的有向图。
这是部分State Space的有向图。
现在我们已经有了这些概念:
- 节点表示各种状态
- 动作可以让我们从一个状态转移到另一个状态
- 状态转移模型定义了我们执行某个特定的动作之后会发生什么。
这些都是在我们解决问题的过程中会涉及到的,但问题是,我们如何确定AI什么时候才解决完问题?
所以我们需要在AI中code出一个目标测试(Goal Test)。
目标测试(Goal Test)
Goal Test为判断给定状态(一般为当前状态)是否为目标状态的方法。例如,导航中的目标测试为判断你当前所处位置是否为你的目的地。
但往往从一个初始状态到目标状态,会有多种解决方法,例如导航里面去往同一个目的地可能有多条路径供选择,而我们往往会选择最短的那条路径,也就是往往会选择成本低的解决方法。成本低对应不同的问题会有不同的表现方式,例如路径短、用时短、步骤少等等,如何判断某个解决方法的成本低,就需要通过其 路径成本(Path Cost) 来对比判断。
路径代价(Path Cost)
Path Cost是与某条路径相关联的一个数值型的代价。它可能表示距离、时间、费用、能量消耗等。导航就往往会选路径代价最低(路程最近或用时最短)的那条路线。
所以人工智能往往不只是找到解决方案,还要找到能够最大限度地减少这种路径代价的方法。
在理想状态下,AI不仅要找到解决方案,还应找到最优解决方案。
解决方法
对于迷宫这种游戏,我们无法确定选择的方向是否能通往目的地,因此就需要不断尝试,当尝试的方向碰到死路,再回到上一个选择,选择另一个方向,为了能执行这些操作,我们往往会选择节点这样的数据结构,其中每个节点又包含了以下数据:
- 一个状态
- 从父节点到该节点所执行的动作(Action)
- 从初始状态到该状态的路径成本
由于该节点只用来保存信息,因此我们需要借助frontier来帮我们完成搜索,这里的frontier相当于一个盒子,里面可以放入未处理或预处理的节点。
下面是个例子:
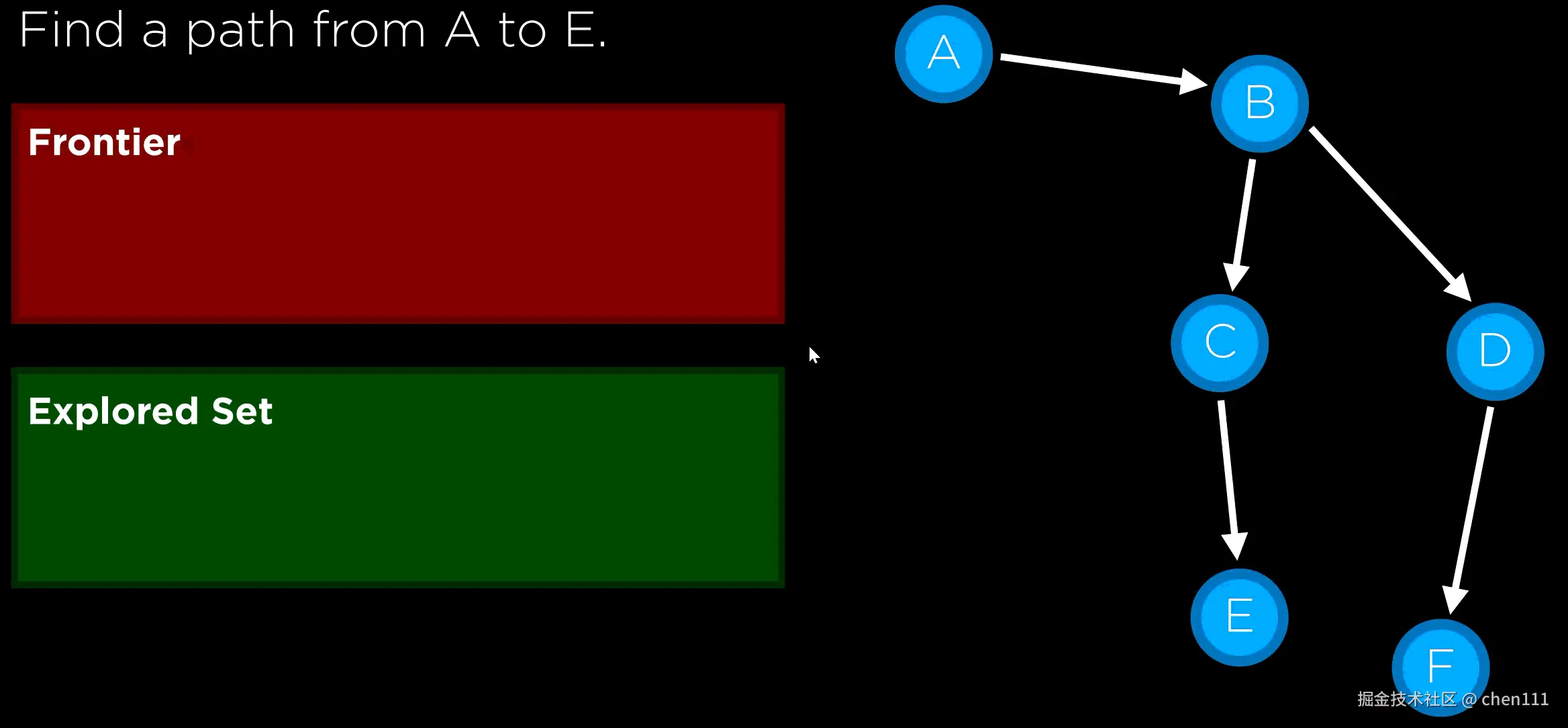
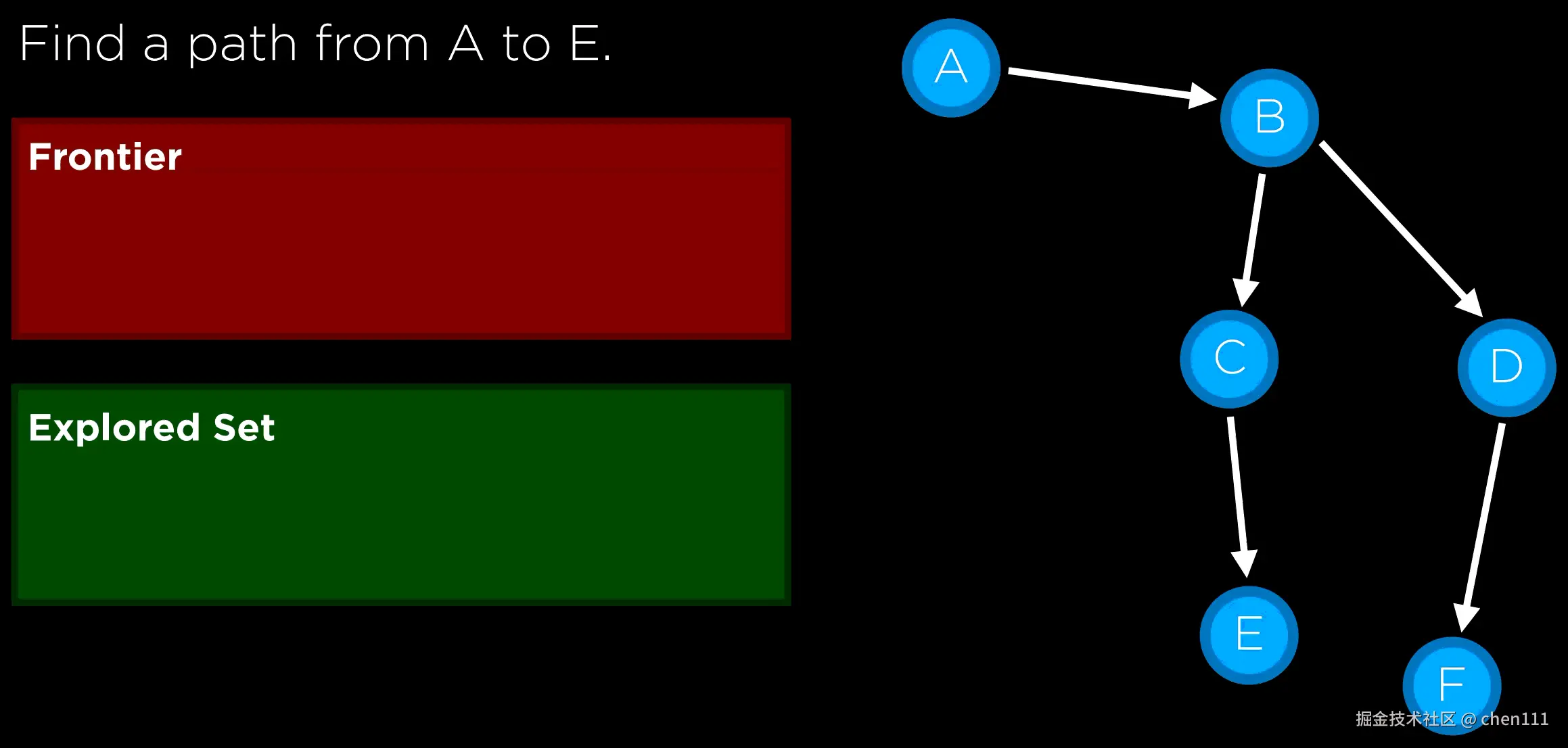
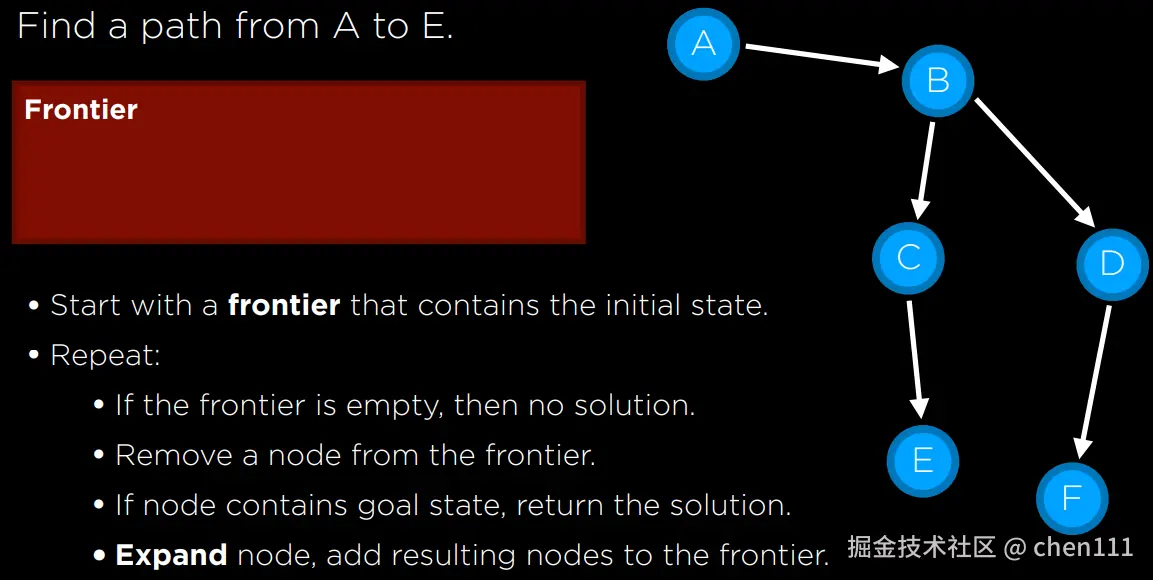 需要找到从A到E的路径,我们可以用深度优先遍历(DFS):
需要找到从A到E的路径,我们可以用深度优先遍历(DFS):
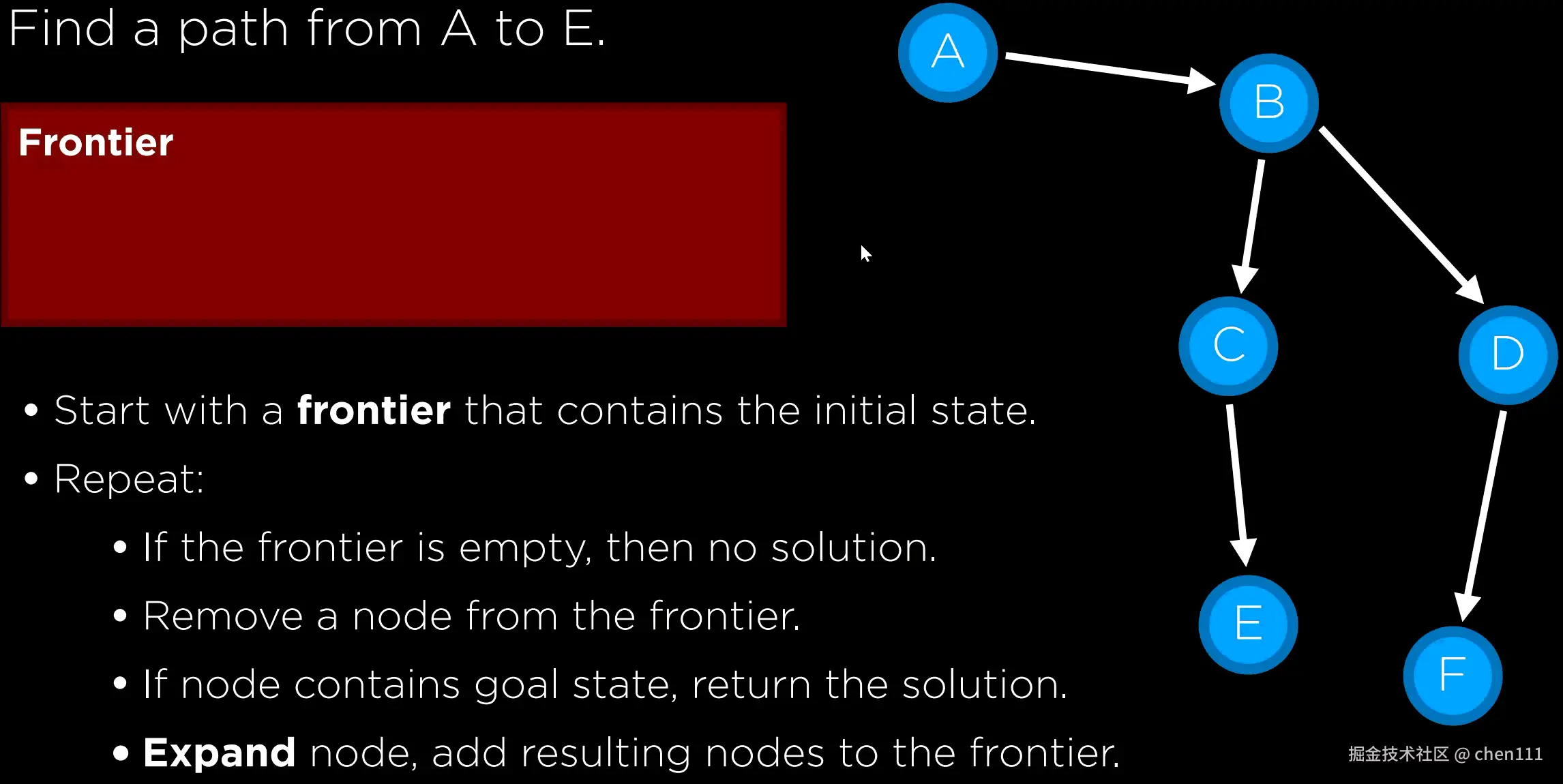
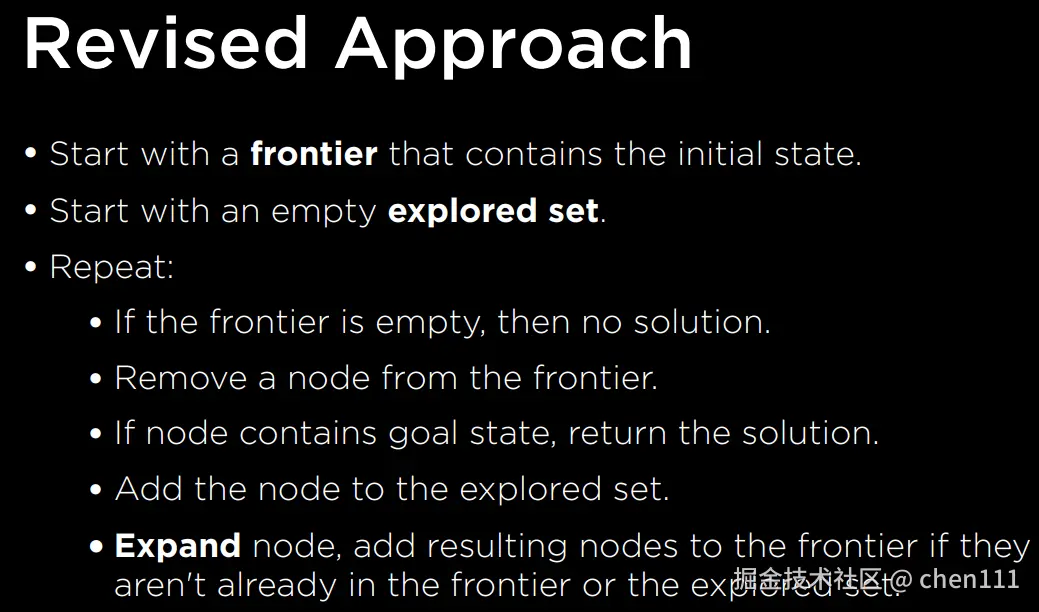
Frontier 则是用栈实现的,里面放置的则是当前节点的子节点以及预处理的节点,处理一个则从里面移出一个。
但是也可能会出现"bug",如图:
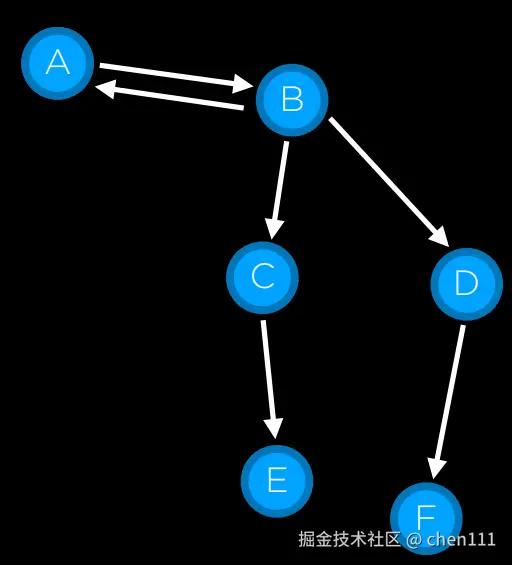 A和B之间是相通的,若用上面那种方法则容易进入A和B交替的死循环,因此,我们再加入一个
A和B之间是相通的,若用上面那种方法则容易进入A和B交替的死循环,因此,我们再加入一个 explored set,里面用于放置已经遍历过的元素,现在,我们遍历的步骤就变成了这样:
 遍历过程也就变成了这样:
遍历过程也就变成了这样:
若要用广度优先遍历(BFS),则只需将Frontier 的结构改成队列(queue),过程如下:
 好,现在我们已经大致了解如何实现DFS和BFS了,接下来转战迷宫问题。
好,现在我们已经大致了解如何实现DFS和BFS了,接下来转战迷宫问题。
迷宫
在我们小时候玩迷宫游戏时,对于那种复杂的迷宫,我们往往会选择一条路走到尽头,然后再回溯,这种方式也就是深度优先遍历。然而,虽然深度优先遍历在有限的迷宫地图中一定能找到通往终点的路径,但有时却不能找到通往终点的最优路径(最短路径),下图则是一种情况:
 很明显,从A点出发,先向右走才是最优路线,但往往DFS方法遇见岔路口先转哪个方向是随机定的。
很明显,从A点出发,先向右走才是最优路线,但往往DFS方法遇见岔路口先转哪个方向是随机定的。
如果用BFS呢?
若DFS是一条路走到尽头,那么可以理解BFS是"齐头并进"。下面是BFS的运行过程: 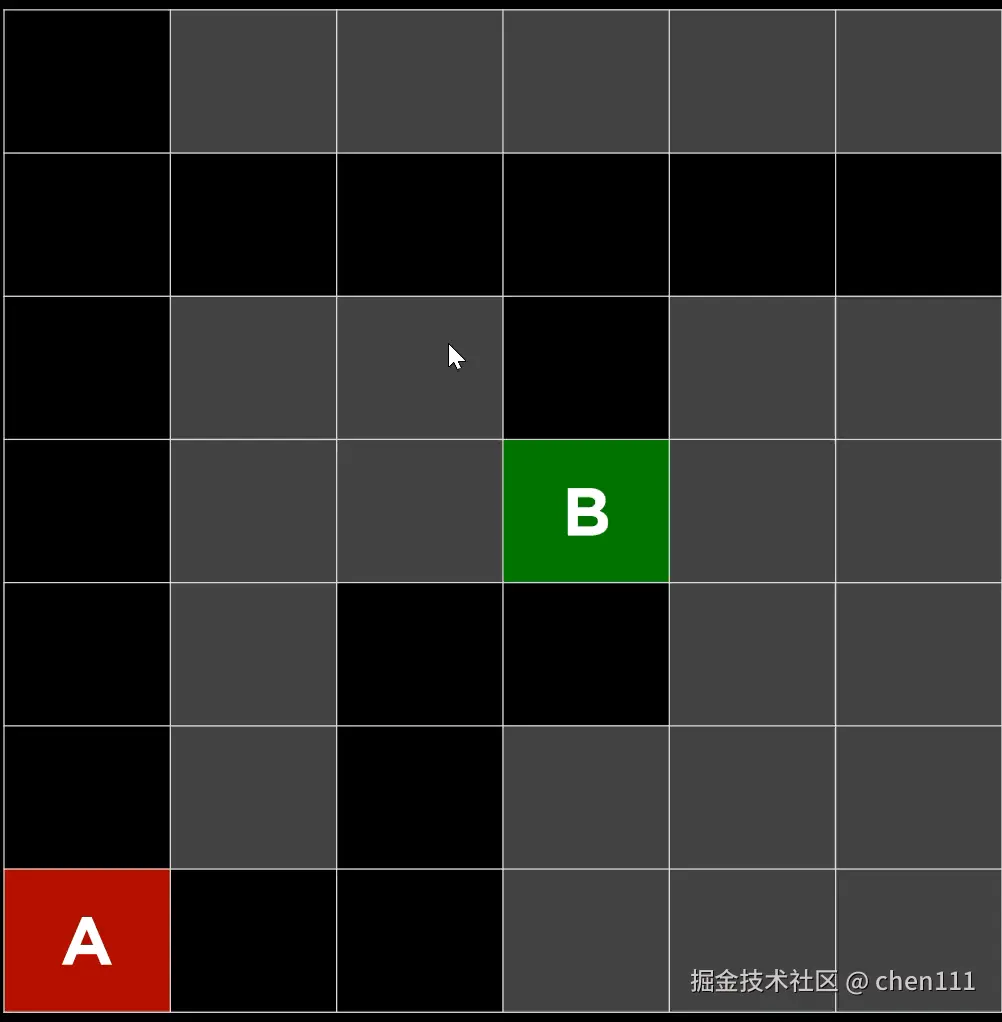 显而易见,这种情况下的BFS能找到最优路线。 既然BFS一定能在有限的迷宫图中找到最优路径,为什么不全用BFS?
显而易见,这种情况下的BFS能找到最优路线。 既然BFS一定能在有限的迷宫图中找到最优路径,为什么不全用BFS?
下面是一个迷宫图的两种解决效果:
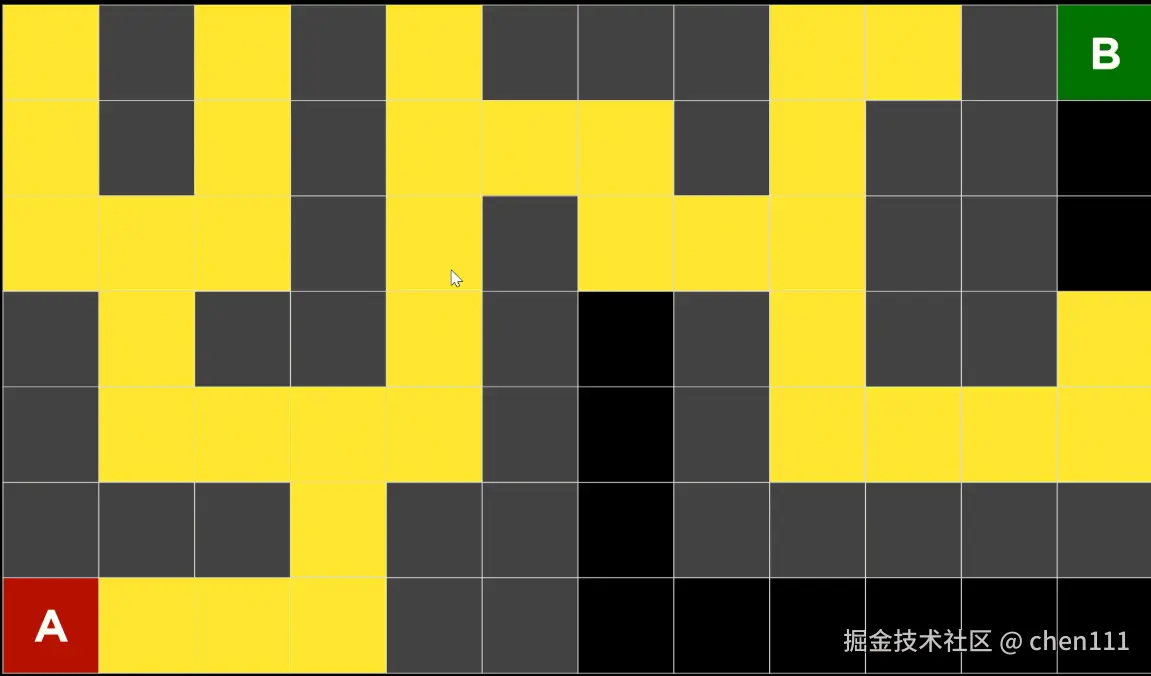
DFS:
 BFS:
BFS:
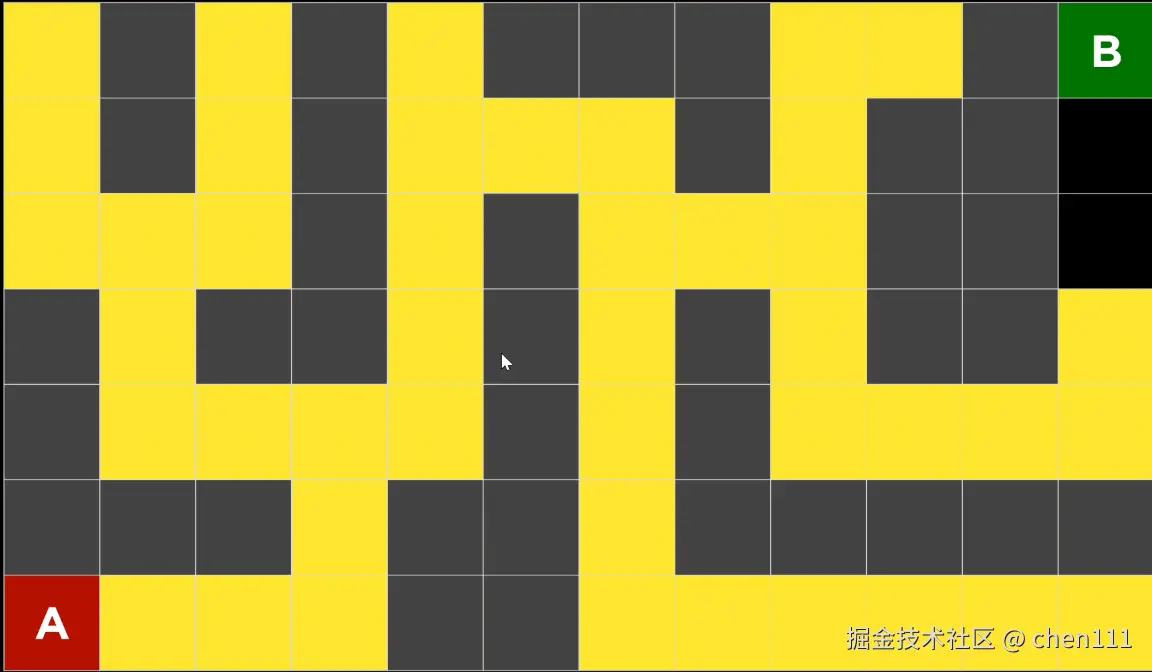 由遍历的结果图可知,BFS遍历的状态比DFS更多。因此,在一定情况下,DFS会比BFS更节省内存。(保存的节点更少)
由遍历的结果图可知,BFS遍历的状态比DFS更多。因此,在一定情况下,DFS会比BFS更节省内存。(保存的节点更少)
事实上,BFS和DFS都是无信息搜索算法(uninformed search),所谓"无信息"是指,这些算法在搜索过程中不会利用任何额外的、预先已知的问题信息,它们只依赖在探索过程中自己获取到的信息去决定下一步怎么走。也就是,不管处理的迷宫地图是什么样的,当遇见岔路口时处理的方法都是一样的。
但是,很多时候我们是可以获取一些关于问题的额外信息的,例如,当我们拿到迷宫地图,可以根据起点和终点的位置判断出应该向哪个方向移动,当我们走到岔路口时,可以看出哪一条路大致朝着出口方向,哪一条路"背道而驰"。
人工智能也可以利用类似思路------根据特殊情况进行针对性搜索。
因此,能利用这些额外知识、试图提升搜索效率的算法,叫做有信息搜索算法 (informed search algorithm)。 贪心最佳优先搜索 (Greedy Best-First Search)就是一种有信息搜索算法。
贪心最佳优先搜索(Greedy Best-First Search,GBFS)
贪心最佳优先搜索(Greedy Best-First Search)就是每次都挑看起来离目标最近的节点 去扩展,这个"最近"是靠一个启发式函数 h(n) 来判断的。
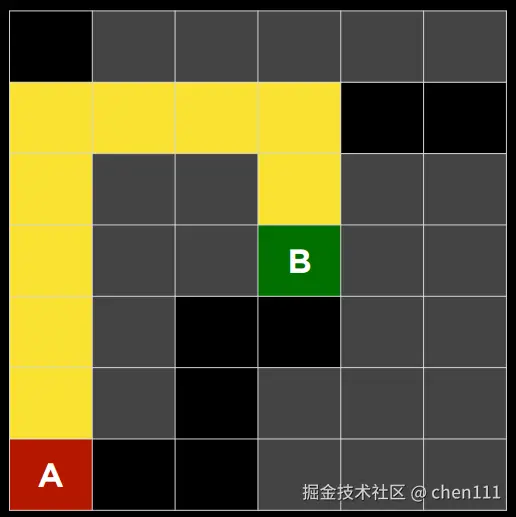
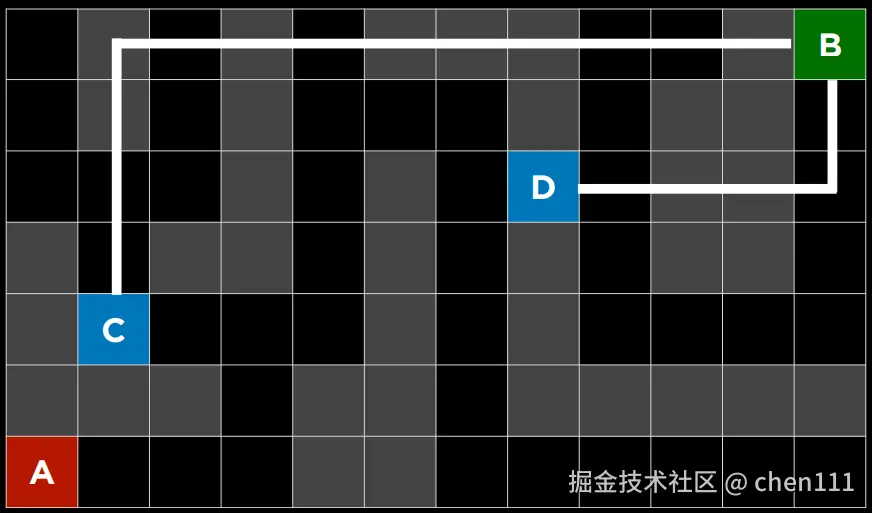
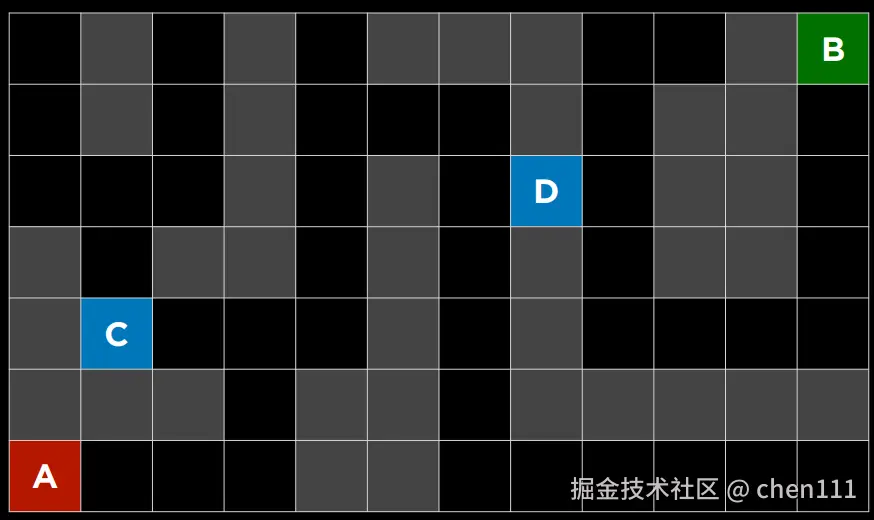 如图,A是起点,B是出口,我在地图中选两个点C和D,让你选一个作为新的起点,在以到达终点B为目的的情况下,你会选哪个?
如图,A是起点,B是出口,我在地图中选两个点C和D,让你选一个作为新的起点,在以到达终点B为目的的情况下,你会选哪个?
毋庸置疑,任何人看到都会选D。是因为我们忽略了墙的存在,即每格都是通的,这样,我们就可以将这个图看作一个二维坐标图,在知道A、B、C、D四个点的坐标的情况下,计算得D离B的距离更近。
 这就是一种常见的距离计算的方法 ------ 曼哈顿距离(Manhattan Distance) (在二维平面上,两个点之间的曼哈顿距离 是它们在 x 方向的距离 + y 方向的距离)
这就是一种常见的距离计算的方法 ------ 曼哈顿距离(Manhattan Distance) (在二维平面上,两个点之间的曼哈顿距离 是它们在 x 方向的距离 + y 方向的距离)
在这里的启发式函数h(c)就是两点间曼哈顿距离的比较计算。
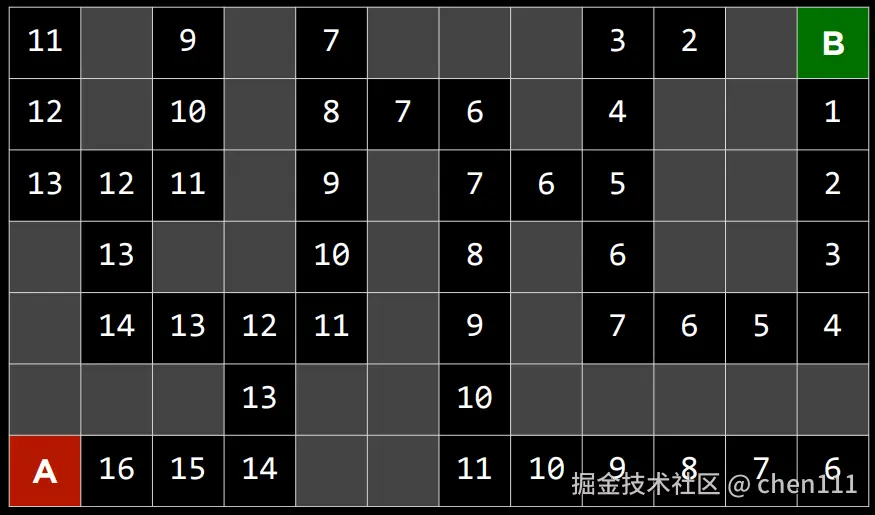 这样,我们就能标出每个点对于出口的曼哈顿距离,并尽量走数值小的点。过程如下:
这样,我们就能标出每个点对于出口的曼哈顿距离,并尽量走数值小的点。过程如下:
 贪婪最佳优先搜索算法好不好用,效率高不高,很大程度上取决于这个启发式函数准不准。比如,在迷宫里,我们可以用"曼哈顿距离"来当这个估算方法:它完全不管墙壁,只计算从当前格子到目标格子上下左右走几步能到。但计算结果一定对吗?我们的计算是基于没有墙壁的,加上墙壁,实际情况也可能变化,所以:
贪婪最佳优先搜索算法好不好用,效率高不高,很大程度上取决于这个启发式函数准不准。比如,在迷宫里,我们可以用"曼哈顿距离"来当这个估算方法:它完全不管墙壁,只计算从当前格子到目标格子上下左右走几步能到。但计算结果一定对吗?我们的计算是基于没有墙壁的,加上墙壁,实际情况也可能变化,所以:
这个函数是用来估算某个节点到目标还有多近,但说到底它只是估算,可能会出错。
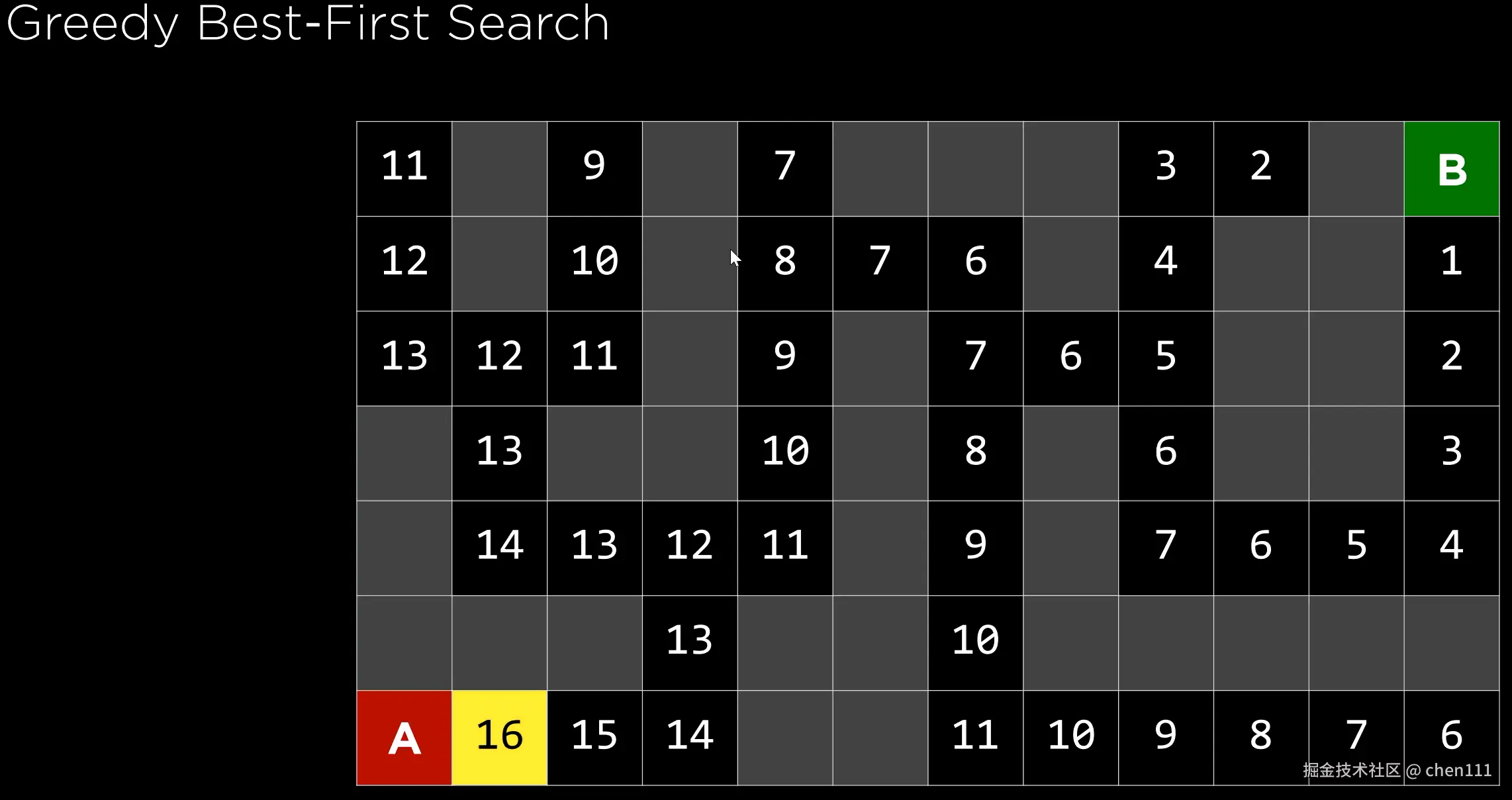
下面就是一个例子:
 夸张地说,贪婪最佳搜索算法不仅没有选择最佳路径,反而选择了最长路径(最坏情况)。这也能体现贪婪算法的特点:选择当前状态下的最佳决策。但有时会错过全局的最佳决策。
夸张地说,贪婪最佳搜索算法不仅没有选择最佳路径,反而选择了最长路径(最坏情况)。这也能体现贪婪算法的特点:选择当前状态下的最佳决策。但有时会错过全局的最佳决策。
可以看到,选择的这条路上的数值先是逐渐减少,后来却在没有分岔口的情况下逐渐增加,或许这就是需要我们优化的痛点。
我们从起点右拐到第二个12的点需要21步,但是左拐到第二个13的点却只需要6步,对于贪婪算法来说,12小于13,所以该选第一个路径。但或许我们可以更聪明一点地想 ------ 如果某个地方按启发式估算看起来离目标稍微远一点,但我实际上能更快到达那里,我宁愿去那个地方。
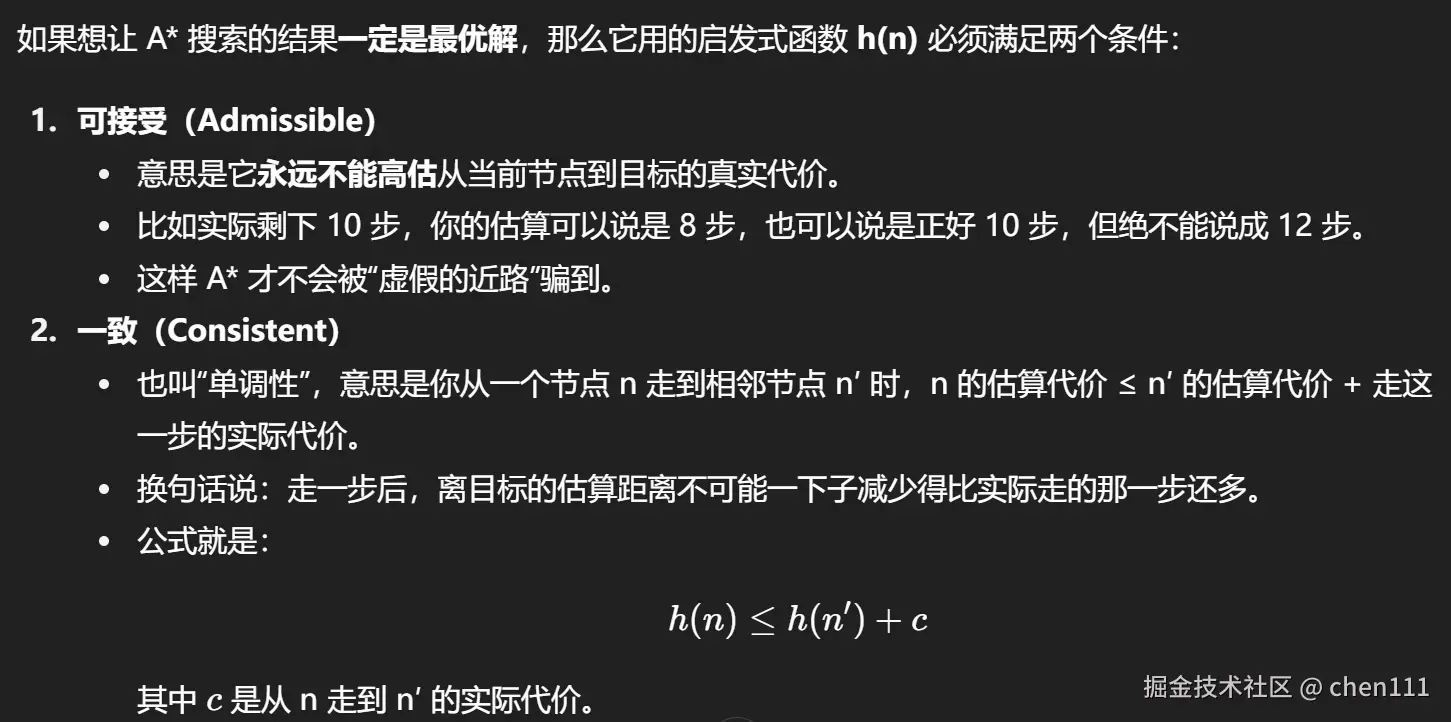
所以我们不仅需要考虑从当前位置到目标的估计成本,还需要考虑从起点到当前位置的应计成本,这就衍生出另一个算法------ A* 搜索。
A* 搜索(A* Search)
该搜索算法则需要考虑 h(n) 和 g(n) 的和, 其中,g(n) 指的是从起点到当前状态花费的成本,h(c)指当前状态到目标状态需花费的估计成本。
于是,整个过程就变成了这样: 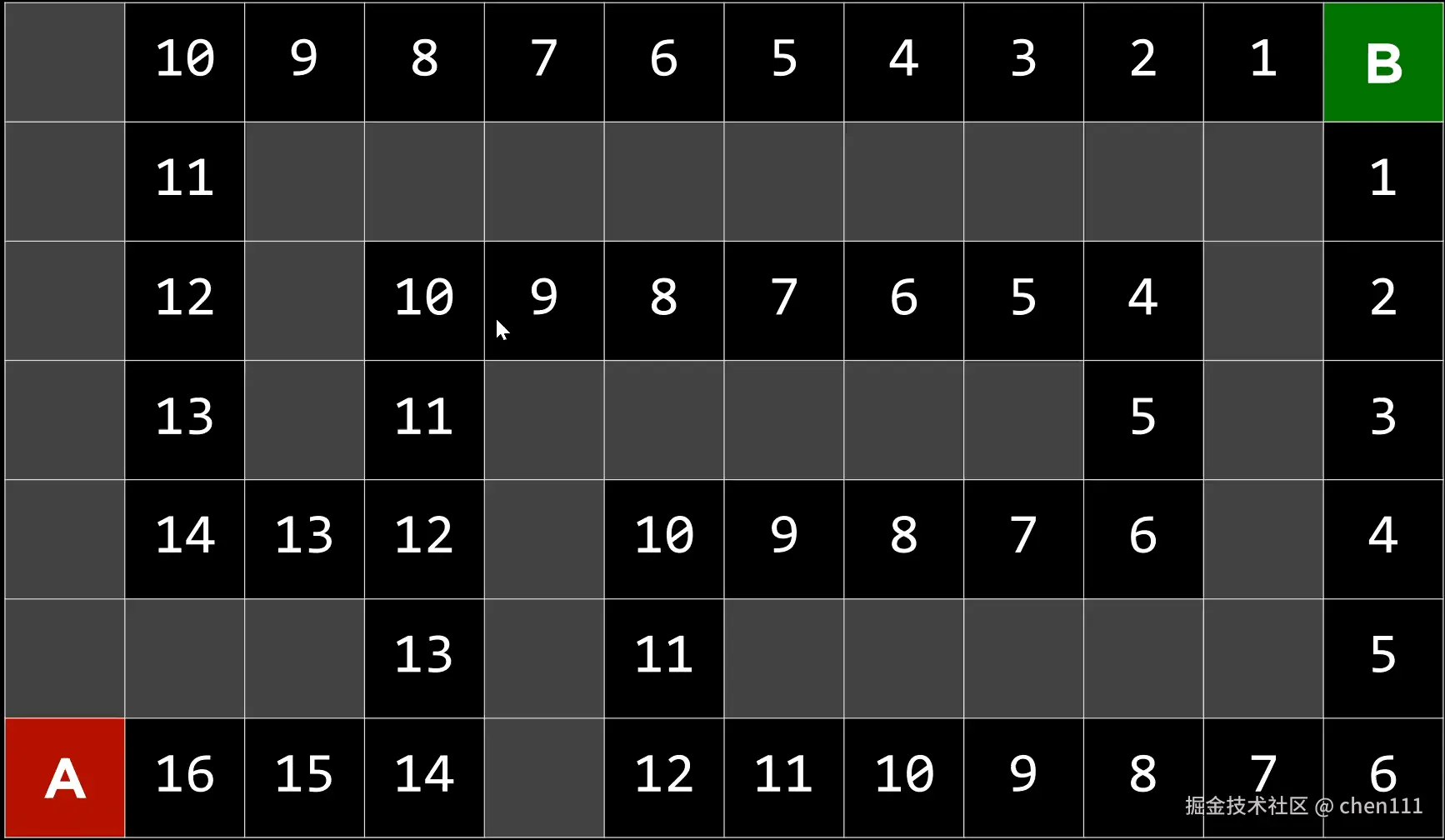
当右拐后走到 15+6 时,发现左拐第一个点的16+3 的值更小,于是立即转到另一个路口,换句话概括说------A* 会一路记录这个总费用,如果发现现在这条路的 g(n) + h(n) 已经比之前某条候选路线的估算总费用还高,它就会果断放弃当前这条路,回头去走那条更优的路线。这样就避免了被 h(n) 误导。
再强调一次,A* 搜索也是依赖启发式函数的,其效果如何,取决于这个启发式是否适用当前情况。若启发式函数给的方向不靠谱,有时候该算法会比贪心搜索,甚至比那些完全不看启发式的"盲搜"还慢。
 当然还有其他的搜索算法对其他情况进行了优化,我们在这只举例这些。
当然还有其他的搜索算法对其他情况进行了优化,我们在这只举例这些。
对抗搜索(Adversarial Search)
虽然之前我们已经讨论过需要找到问题答案的算法,但在对抗性搜索中,该算法面对的是试图实现相反目标的对手。通常,在游戏中会遇到使用对抗性搜索的人工智能,例如井字游戏。
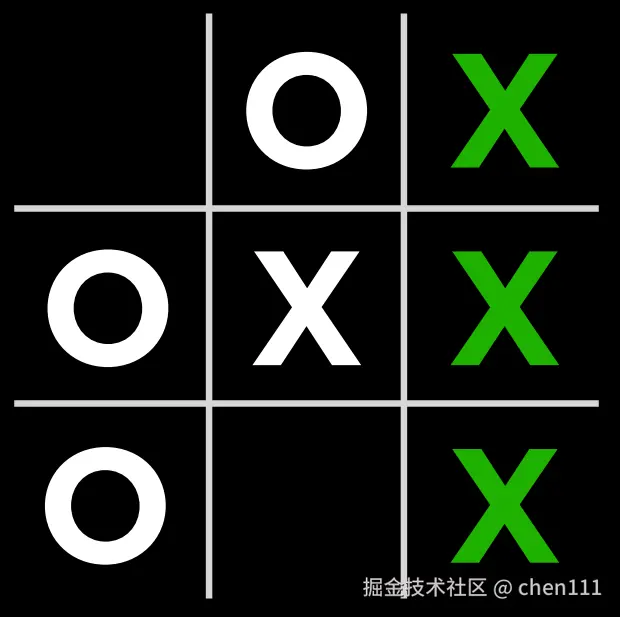 所使用的符号连成3个,该方获胜。这种规则是我们人所能理解的,但是如何以"计算机的语言"来表达,我们知道的是,计算机能理解数字,能够判断数字的大小,所以我们就利用这一点,用数字来分配不同状态。
所使用的符号连成3个,该方获胜。这种规则是我们人所能理解的,但是如何以"计算机的语言"来表达,我们知道的是,计算机能理解数字,能够判断数字的大小,所以我们就利用这一点,用数字来分配不同状态。
对于这种对抗游戏,结局无非有三种可能:玩家赢、对手赢、平局。所以我们将这些状态赋值,拿井字游戏来说------O赢为-1,X赢为 1,平局为 0 。 所以O方玩家的目标是使得状态对应的值越小 越好,我们将其称为最小玩家;X方玩家的目标是使得状态对应的值越大越好,我们将其称为最大玩家。
这就是极大极小算法的思想之一。
极大极小(Minimax)
极小极大是对抗搜索中的一种算法,将获胜条件表示为一侧的获胜条件为 (-1),另一侧的获胜条件为 (+1)。进一步的行动将由这些条件驱动,最小化的一方试图获得最低的分数,而最大化的一方试图获得最高分数。
在我看来,该算法就是用AI来模拟两个玩家下棋的过程,并举出所有可能性。
所以我们需要通过每一步的状态信息,再一步一步地得出结果。 我们用一些函数来定义游戏规则和状态变化:
- S0 :初始状态。也就是一开始的棋盘。
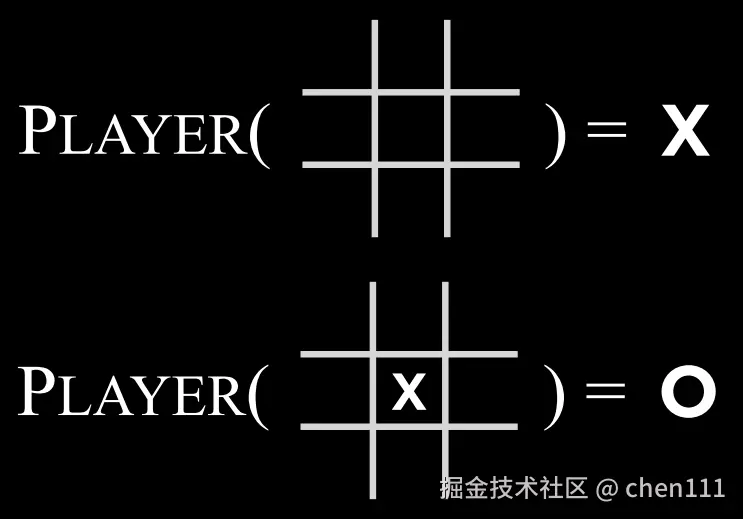
- Players(s):一个函数,输入当前棋盘状态
s,返回轮到哪方下棋。 - Actions(s):一个函数,输入当前棋盘状态
s,返回所有能走的合法位置(哪些格子是空的)。
- Result(s, a):一个函数,输入当前棋盘状态
s和一个动作a,返回在s状态下执行动作a后产生的新的状态。 - Terminal(s):一个函数,输入当前棋盘状态
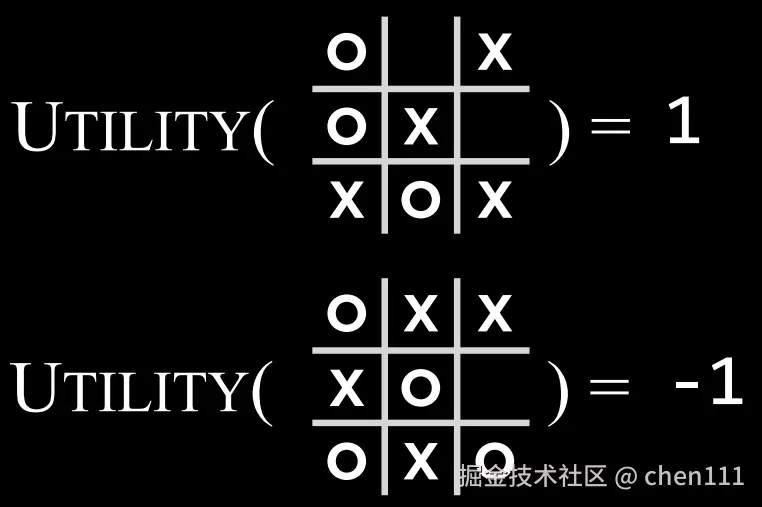
s,判断游戏是否结束(结束返回True,反之返回False)。 - Utility(s):一个函数,输入一个结束状态
s,返回结局对应的值。- 1:X玩家赢
- -1:O玩家赢
- 0:平局
在X玩家的视角模拟从初始状态到最终状态过程中所有的可能性:
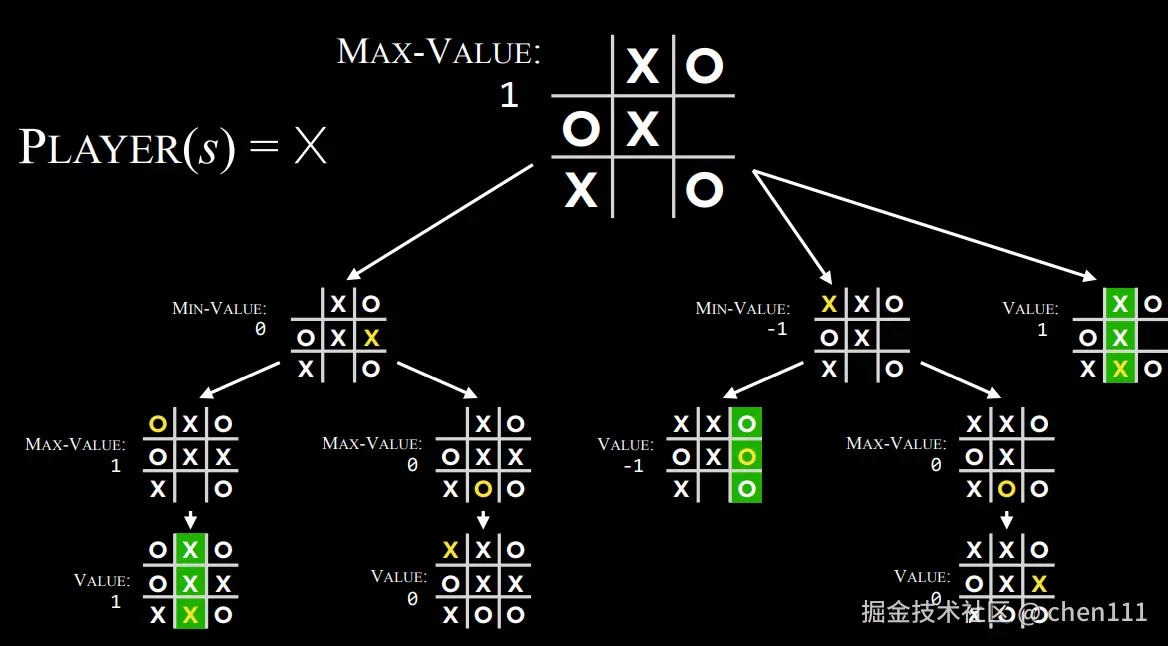 再根据最终值来选择走哪一步。
再根据最终值来选择走哪一步。
其实除了井字棋游戏,还有其他的对抗游戏,所以我们需要用它们的共同点得出通用的式子------那就是,双方玩家的目的都不变,一方尽力使数值更小,另一方尽力使数值更大。
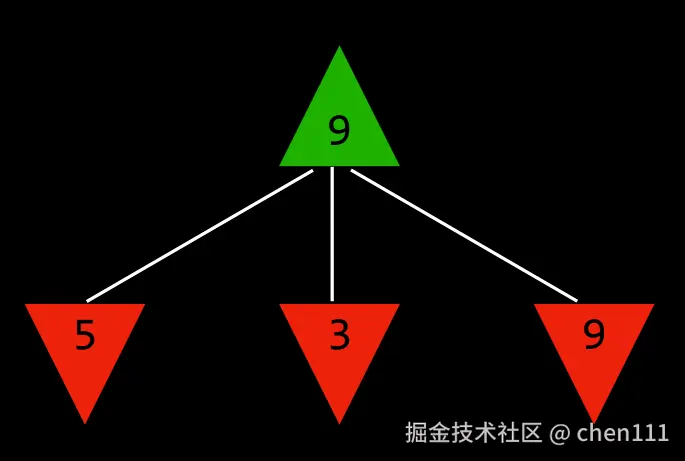 上图中,绿色的向上的箭头代表最大玩家,红色的向下箭头代表最小玩家,此时到最大玩家执行动作,有三个选择,选择结果分别是5、3、9,很明显,对于最大玩家来说,选择9是当下最好的打算。
上图中,绿色的向上的箭头代表最大玩家,红色的向下箭头代表最小玩家,此时到最大玩家执行动作,有三个选择,选择结果分别是5、3、9,很明显,对于最大玩家来说,选择9是当下最好的打算。
没这么简单,我们还可以预判对方的选择。下图:
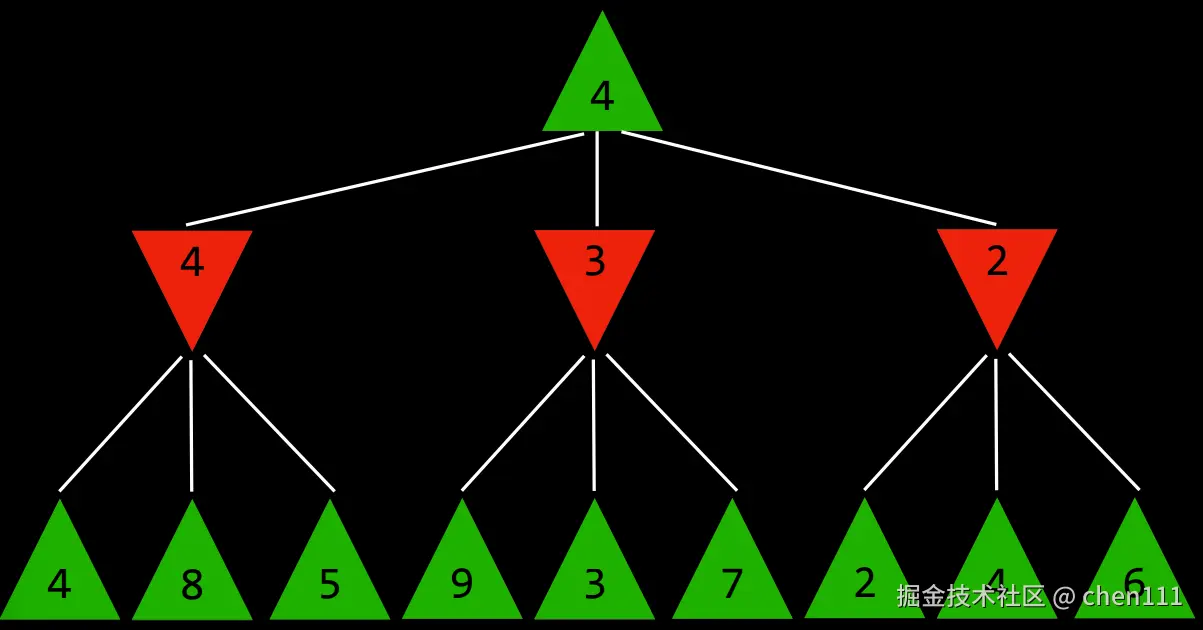 我们是最大玩家,现在面临三个选择:4、3、2,若我们选择4,对手则可能选择4、8、5中的一个,按照最坏情况,对手可能选4,以此类推,若我们选3,对手可能选3,若我们选2,对手可能选2,所以,我们若要让分数尽量大,我们就需要选择4。
我们是最大玩家,现在面临三个选择:4、3、2,若我们选择4,对手则可能选择4、8、5中的一个,按照最坏情况,对手可能选4,以此类推,若我们选3,对手可能选3,若我们选2,对手可能选2,所以,我们若要让分数尽量大,我们就需要选择4。
这种情况需要执行12次才能得出选择4的这个决定。但井字棋一共只有 255,168 种可能的对局过程(从开局到结束的完整走法组合),这是一个极其巨大的数字。
如果遇到比刚才更糟糕的情况呢?难道我们要全部遍历一遍吗?还是说,如何优化?
Alpha-Beta剪枝(Alpha-Beta Pruning)
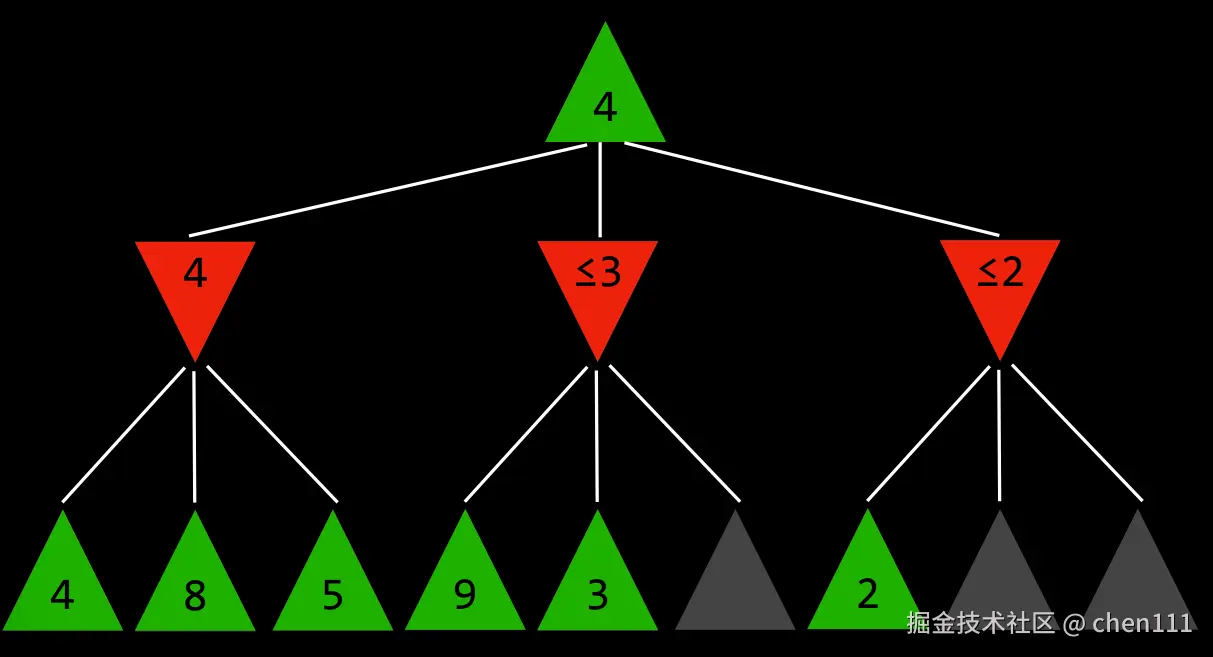 由于最大玩家会尽量提高分数,所以第三层的节点的值一定大于其父节点。当我们遍历完4分数的子节点,明白若选择4则最坏的情况下对手会选择4。我们开始遍历分数3的子节点,当遍历到第二个节点3的时候,我们就能知道,剩下的节点分数一定大于等于3,所以最大玩家若选择3,其对手可能会选择3,这个结果比4更差。遍历分数2的子节点也是同理,当我们遍历到第一个子节点2时,由于其父节点是2,所以其剩下的子节点的分数一定大于等于2,最坏的情况下对家就会选择2,比前两个选择结果更差。(注:以上都是从最坏的情况考虑)
由于最大玩家会尽量提高分数,所以第三层的节点的值一定大于其父节点。当我们遍历完4分数的子节点,明白若选择4则最坏的情况下对手会选择4。我们开始遍历分数3的子节点,当遍历到第二个节点3的时候,我们就能知道,剩下的节点分数一定大于等于3,所以最大玩家若选择3,其对手可能会选择3,这个结果比4更差。遍历分数2的子节点也是同理,当我们遍历到第一个子节点2时,由于其父节点是2,所以其剩下的子节点的分数一定大于等于2,最坏的情况下对家就会选择2,比前两个选择结果更差。(注:以上都是从最坏的情况考虑)
经过上面的分析,最大玩家才选择4。这种算法叫做Alpha-Beta剪枝 (Alpha-Beta Pruning ),是采取剪枝措施对Minimax的一种优化。
井字棋的全部可能对局只有 255,168 种 ,而国际象棋的可能对局数大约是 1029000 这么夸张的数量级。
Minimax如果按照最原始的方式运行,需要从当前局面一直穷举到游戏结束的所有可能走法。 井字棋的情况,计算机可以轻松算完,但国际象棋就完全不可能做到。
深度限制极大极小算法
所以我们有了深度限制极大极小算法(Depth-limited Minimax) ------它只计算一个预先设定的步数,然后就停下来,不一定走到游戏真正结束。
问题是,这样停下来时并不知道每个走法的最终结果,所以没法直接给出精确的数值评价。
为了解决这个问题,就引入了评估函数(Evaluation Function) 。
评估函数的作用就是在游戏中途,根据当前局面去估算这个局面对玩家的好坏程度(也就是"效用值")。
比如在国际象棋里,它会看当前双方的棋子数量、棋子种类、位置等,综合评估谁的形势更好,然后返回一个正数(对一方有利)或负数(对另一方有利)。
这样,Minimax 虽然没走到终局,也能通过评估函数的分数来决定哪个走法更好。评估函数越精准,Minimax 算法做出的选择就越靠谱。