自动驾驶摄像头的图像评测
摄像头的性能受到环境光照、天气条件、运动模糊等因素的影响,因此需要通过多方面的评测来确保其在各种场景下的可靠性。
在自动驾驶领域,图像质量评估不仅关注图像的清晰度、分辨率等传统指标,还需要结合目标检测和场景理解的需求。例如, OD50(Object Distance at 50% average precision) 是一种专门针对自动驾驶目标检测任务的图像质量评价标准,它在平均精度(AP)的基础上引入了目标距离的维度,更适用于自动驾驶的感知测试需求。
此外, 检测质量指数(DQI) 是一种结合了细粒度显著性图强度和目标检测算法输出结果的评估方法,能够为每个帧提供检测质量反馈,从而更准确地评估自动驾驶环境中基于摄像头的系统的检测质量。
图像评测方法
-
静态测试:主要评估摄像头的视场角、畸变率、观测距离等参数。例如,5mm镜头拥有较大的视场角,而12mm镜头可视距离更远但盲区较大。随着镜头焦距的增加,畸变率逐渐变小,8mm镜头没有明显畸变。
-
动态测试:研究摄像头在不同车速下的帧率表现,以及在不同光照条件下的成像效果。例如,随着车速的提高,采集帧率固定时,经过同一目标的图像采集次数减少;而采集帧率提高时,经过同一目标的图像采集次数增加。此外,光强越小,相机获得较好成像效果所需的曝光时间越长,导致相机在光线较暗时容易出现卡顿现象。
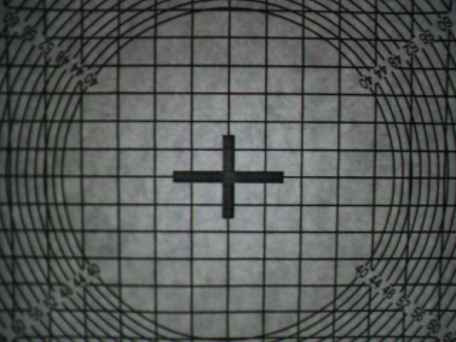
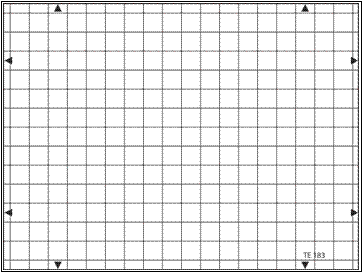
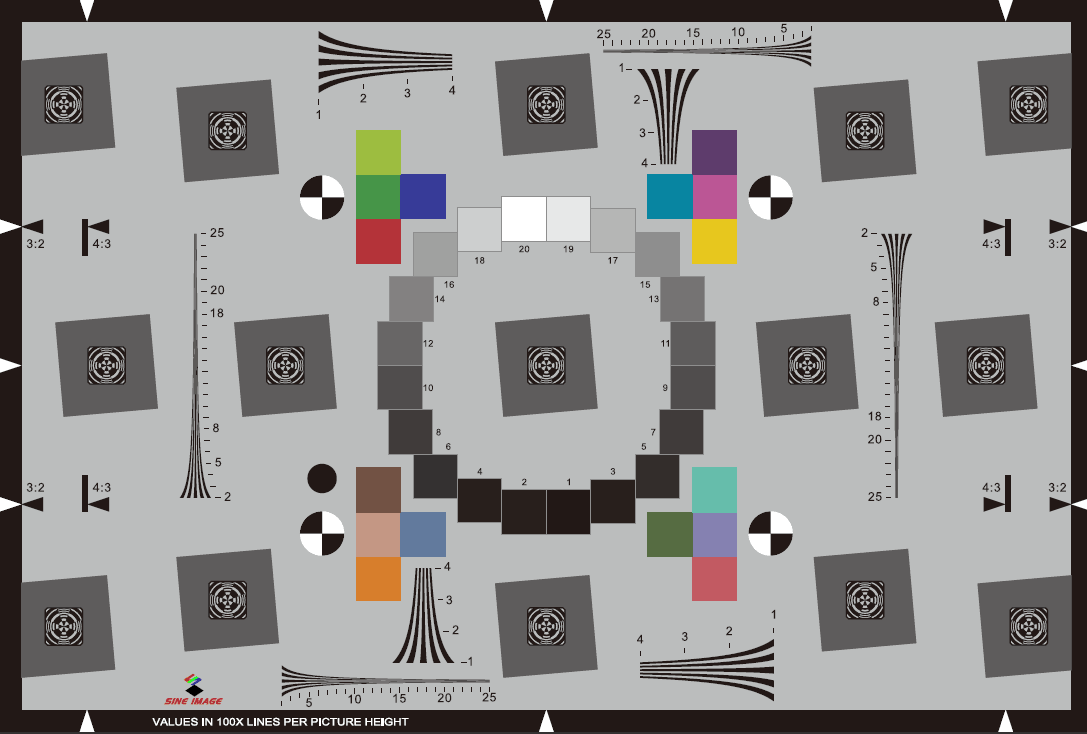 图1 分辨率测试卡
图1 分辨率测试卡
以分辨率评测为例,进行详细说明
摄像头、相机分辨率测试的流程是:在实验室环境下,将分辨率测试卡放置在摄像头测试灯箱上(一般透射式图像测试卡是放在透射灯箱上的),或者使用图卡挂架将图卡挂起来(这种是反射式图像测试卡,采用的光源一般是立式补光灯)。将摄像头、相机使用支架架起,然后对准分辨率测试卡,使的两者在同一水平线上,如果是变焦镜头需要调整好焦距,定焦镜头需要前后移动支架,在摄像头或者相机显示屏上,应当图卡的有效高度正好充满画面(在实际拍摄中会有一定难度,因此也可拍摄稍小或稍大,后续将此时的读数换算成正确的分辨率数值即可),如此我们即选取好了分辨率测试卡与摄像头或者相机的位置。
测试卡有效高度充满画面时,测试卡的4:3区域也应该正好充满画面(如图)。在取景偏大或偏小的情况下,应尽量使4:3区域中的J1、K1、J2、K2、JD、KD处于画面中心。测试四角分辨率时,要分别将四角上的十字型测试单元置于画面角落。实际操作可以将测试卡16:9端线贴在画面外框,测量这一端上下两个角的分辨率,再测另一侧两个角的分辨率。
以上的过程是将摄像头、相机拍摄分辨率测试卡,好在对应的爱色影提供的iQstest摄像头测试分析软件上进行数据分析。为什么要使用这种iQstest摄像头测试分析软件?主要原因是这种测试软件能够加快我们数据分析的速度,而且能够得到更准确的结果,毕竟使用目视进行观察的话,结果还是不准确的。
从上述的摄像头分辨率测试流程中,我们可以知道摄像头分辨率测试影响因素有:1、分辨率测试卡的版本。虽然ISO 2000分辨率测试卡是一种经典的分辨率测试图卡,但由于近年摄像头的分辨率原来越高,ISO 2000分辨率测试卡已经不能够满足需求,所以很多的厂家开始使用ISO 2014分辨率测试卡,以求达到更高的分辨率测试。2、镜头对焦需要准确。如果摄像头、相机的对焦不准确,那么拍摄图像测试卡得到的图像就会不清晰,进而进行分析时,摄像头、相机的分辨率会被人为的"降低"。3、尽可能的使用配套的iQstest摄像头测试分析软件,肉眼得到的结果相对于软件分析来说会不准确。4、分辨率图像测试卡的质量。有的厂家生产的图像测试卡质量低劣,本身就不清晰,所以不能用不标准的测试卡来测定摄像头、相机的标准分辨率。5、摄像头、相机的分辨率是其固定的参数属性,摄像头、相机本身的白平衡、色彩平衡等性能也是其属性,在进行分辨率测试时,相机的曝光时间、白平衡、色彩平滑都不会对其产生影响。如果将人眼比作摄像头、相机镜头时,人眼看分辨率测试图卡时,图卡是否是黑白还是彩色,对摄像头、相机的分辨率都不会有影响,分辨率的高低代表着摄像头、相机镜头在一定的距离上,能否将画面看的更细的能力,因为摄像头、相机镜头都是硬件,相机本身的曝光时间只会影响到图像的亮度,而不会影响到图像的分辨率。
因此,摄像头分辨率测试影响因素主要有分辨率测试卡的质量、版本、镜头是否对焦、是否使用相应的图像分析软件进行分析。而相机相机本身的曝光时间、白平衡、色彩平衡性能对分辨率的测试是没有影响的。
以下为常用的摄像头性能测试方案
1、摄像头逆投影解析
逆投影解析主要用于检查摄像头的解像能力。如字面意思一样,将投影机把卡上图像投影在暗室中的屏幕上,然后调节被测试的镜头对准屏幕,使显示的图象呈现最清晰的状态,此时利用人眼观察显示图象的清晰程度,从而可以评价镜头的成像质量。虽然肉眼观察准确度不够,但也足以对这款摄像头的性能做出参考,如果被测摄像头众多且数据量较大,整体上来说,这种方法也是较为可靠的。

需要用到的测试设备:投影机,漫反射白屏,相关夹具用于稳定平台
测试所需环境:光学暗室(最好是专业是图像评测实验室环境,以防止光线反射造成的影响),环境照度底于1lux
2、解像力测试 MTF测试
MTF:检查通过对整个模组MTF的检查来评价镜头的解析能力,同时考察镜头的解析能力的一致性。
要用到的测试设备:MTF测试卡,CCM 测试,测试板,测试治具,电脑,测试软件
测试环境:测试用暗房,卡的表面照度(800+/-50lux)
 标题
标题
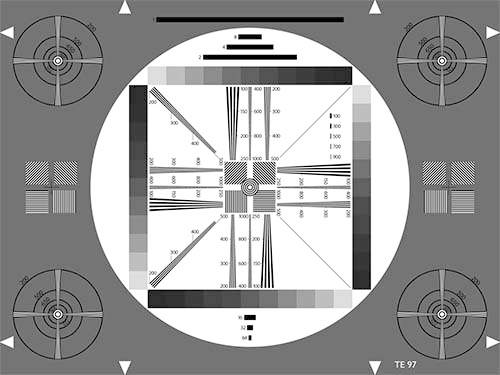
3、TV-Lines 测试
通过判读测试卡的图片来评价镜头的分辨率,数据结果为TV-Lines。不同镜头之间可以直接用图片进行拍摄效果的比较。 测试设备:图像测试卡,测试板,电脑,测试灯箱,分析软件
测试环境:测试灯箱,照度800+/-50lux
4、分辨率测试 SFR/TV-Lines
使用专门的分析软件对ISO12233 分辨率测试卡的图片进行分析,读取SFR数据,对LENS解析度进行判断。
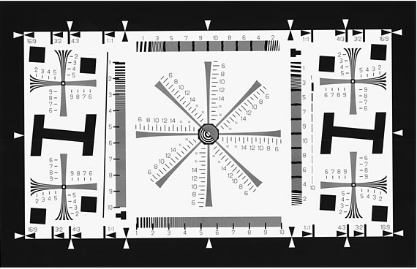
测试设备:ISO12233(也可以使用较为流行的ISO12233 2014测试卡进行测试),测试暗房,测试板,电脑以及配套的图像质量分析软件。
测试环境:800+/-50lux
5、色彩还原能力测试
在不同色温/光源条件下拍摄24色卡,比较拍摄图样中的色块数值与标准值的差异,评价摄像头镜头的色彩还原能力。

测试设备:TILO比色灯箱,24色卡,测试板,电脑,配套的图像质量分析软件
测试环境:DAYLIGHT, COOL WHITE , TL84/U30
6、灰度分辨能力测试 灰阶 EIA CHART/灰阶卡
在不同光源环境下拍摄灰阶测试卡,判断所得图片,比较镜头对灰阶的分辨能力。
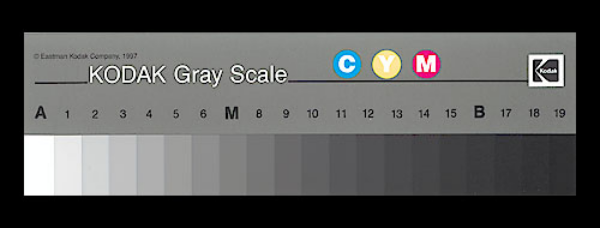
测试设备:TILO比色灯箱, Gray Scale chart,测试板,电脑,分析软件
测试环境:DAYLIGHT, COOL WHITE
7、相对照度测试 Shading 18%灰卡
在均匀照明条件下拍摄18%灰卡,分析图片的中心与四周的亮度比,评价镜头的Shanding性能。
测试设备:测试用暗房, 18% 灰阶测试卡,测试板,电脑,摄像头质量分析软件
测试环境:600+/-50lux
8、视场范围测试 FOV ColorChecker CHART/FOV Chart
通过在特定距离上拍摄FOV chart,对图片进行计算判读,从而测得镜头+传感器的视场角
测试设备:测试用暗房,三脚架,FOV chart,电脑
测试环境:600+/-50lux
9、漏光与鬼影测试 Flare 暗室
测试镜头的鬼影和耀斑性能。拍摄按一定规则排列的泛光源,观察所拍得的图片,比较光源的溢出情况。
测试设备:泛光源阵列,光学暗室,测试板,测试治具
测试环境:标准暗室
10、影象畸变测试
拍摄棋盘卡,量测拍得的图片,计算模组的畸变,评价镜头的成像质量。
测试设备:测试暗房,畸变测试卡(棋盘卡) ,测试夹具
测试环境:800+/-50lux
11、室内/室外实际拍摄 清晨/黄昏
在不同室内和室外光源下实际拍摄,评价镜头在常见光源环境下的表现。
测试设备:测试板,移动测试治具、色温计、照度计
测试环境:晴朗早晨,傍晚,室内日光灯,室内白炽灯(标准的图像测试卡实验室可以全程模拟各个时段、各种光源的灯光环境)
图像质量评估的挑战与未来方向
尽管自动驾驶摄像头的图像评测已经取得了一定进展,但仍面临一些挑战。例如,传统面向人类视觉系统的质量评价指标(如MTF和SNR)难以满足自动驾驶感知测试的要求。此外,图像质量评估还需要考虑不同天气条件、光照条件、道路状况等因素的影响。
计算机视觉和人眼视觉的评测标准还是不能完全一致的。
未来的研究方向包括:
-
开发更适用于自动驾驶的图像质量评估指标;
-
探索基于深度学习的图像质量评估方法;
-
提高摄像头在极端环境下的成像能力;
-
推动多传感器融合技术的发展,以提高自动驾驶系统的整体可靠性。
关于图像质量标准的一些法规文档可以参考如下的链接