3D检测作为机器视觉行业增长最快的领域之一,这得益于软件技术的进步使得该技术更易于设计、部署和集成,从而用于更广泛的应用场景。
过去,3D视觉技术部署成本高且复杂,仅限于高端工业应用。然而,随着成本下降和普及度提高,3D视觉解决方案现已适用于更广泛的行业,包括制造业、物流、机器人和质量控制等领域。
通过用一到两台专用3D相机替代多台2D相机,终端用户能够降低安装复杂度、减少系统成本并提升运营效率。此外,即插即用软件的改进和易用性的提升正加速从2D到3D视觉系统的转型。
尽管3D成像的优势显而易见,但一些挑战依然存在。设计者需要在苛刻的性能要求、系统成本与系统集成需求之间实现精妙平衡。
3D成像技术
3D机器视觉市场包含多种不同的成像技术,每种技术都适用于不同的工业应用场景。3D成像在实现精确物体检测、深度测量以及跨行业自动化决策方面发挥着关键作用。工程师设计3D成像设备时,必须综合考虑技术类型、工作原理、精度、速度和环境适应性等因素,以确保设备最适合特定应用场景。
常见四大类3D成像设备技术如下。每种技术都有其独特优势、技术挑战和理想应用场景。

设计3D成像系统的问题
随着3D视觉系统从高端应用转向主流应用,设备设计师面临着多重挑战,包括成本限制、系统集成和实时处理需求。
1. 成本优化
价格可承受性是3D视觉技术广泛采用的关键因素。设计3D成像系统时必须考虑:
• 硬件成本---传感器、处理单元和定制光学元件会显著影响最终价格。
• 开发周期---降低设计复杂度以加速产品上市时间。
• 接口技术---3D成像设备必须与现成处理器无缝集成,这会增加专有开发的成本、复杂性和时间成本。
基于软件的接口方法是应对这些挑战的关键,能使设备制造商在保持高性能的同时构建具有低成本的3D视觉系统。
2. 无缝系统集成
3D视觉领域面临的最大挑战之一,是确保成像设备与现有机器视觉处理系统之间的无缝集成。许多传统3D相机依赖专有接口,这增加了系统复杂性并限制了互操作性。
另外3D系统会生成多种数据类型(如深度图、彩色图像、元数据),这需要高效的数据同步机制。GigE Vision 2.1标准原生支持MultiPart功能可实现对多种类型数据的传输。友思特合作伙伴Pleora的eBUS Edge等软件解决方案,通过优化多组件数据处理能力来确保实时性能。
基于GigE Vision标准的连接解决方案提供了即插即用兼容性,简化了与第三方处理软件的集成流程。
用于3D成像系统的软件方案
eBUS Edge是一款基于软件的连接平台,旨在将3D相机转变为完全兼容GigE Vision和GenICam标准的设备。与传统基于硬件的解决方案不同,eBUS Edge无需额外物理组件即可实现功能,既减小了设备体积,又能通过标准以太网线缆确保无缝数据传输。
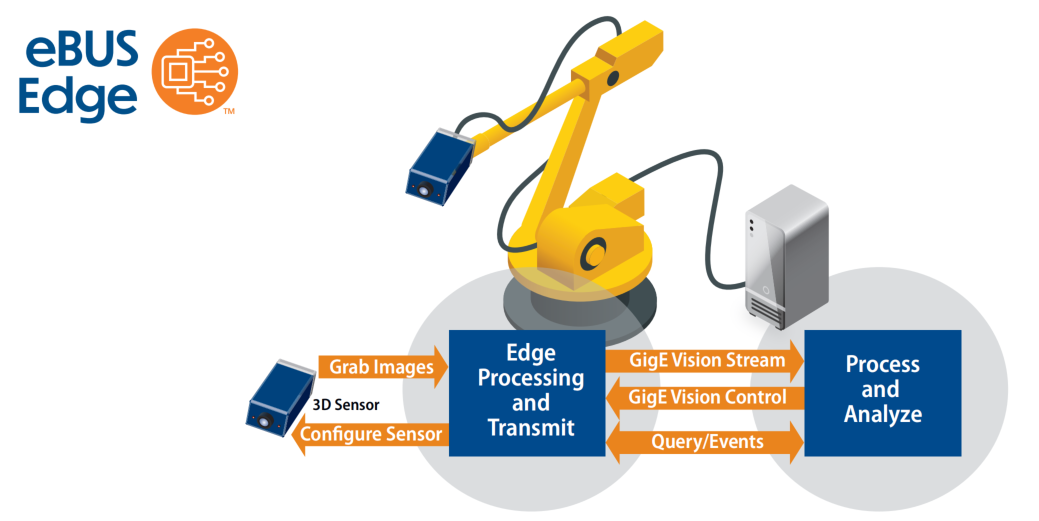
该解决方案提供与现有机器视觉处理软件的即插即用兼容性,显著简化系统集成流程,缩短集成时间并降低开发和部署成本。设备设计人员无需修改现有工作流程,即可实现高性能的实时3D成像应用。
在处理器端,eBUS接收模块将图像或数据高速接收至缓冲区,并由终端应用程序进行进一步分析。借助eBUS接收功能,开发者能够编写运行于主机计算机的应用程序,无缝控制和配置任意数量的符合GigE Vision、USB3 Vision及GenICam标准的传感设备。
该eBUS通用专业驱动程序在接收二维图像或三维数据时可降低CPU占用率,为分析检测应用保留更多处理能力,同时有助于满足自动化实时在线检测应用对延迟和吞吐量的严苛要求。

附录:为什么标准化在3D视觉中至关重要?
GigE Vision与GenICam是广泛采用的机器视觉标准,确保不同相机厂商、图像处理平台及自动化系统间的互操作性。通过遵循这些标准,eBUS Edge:
• 消除供应商锁定---系统设计者和集成商可以混合搭配来自不同供应商的摄像头、传感器和软件
• 确保长期兼容性---为机器视觉硬件和软件的投资提供未来保障,适应设备和系统设计的未来扩展需求
• 降低开发复杂度---现成的软件解决方案简化了设备设计和处理集成,使集成商更容易实现3D视觉应用
如果不使用标准的视觉协议,系统集成商和设计者将可能面临兼容性问题,需要投入高昂的定制软件开发成本。
友思特
eBUS Edge
eBUS Edge是一个软件平台,无需任何额外的硬件,即可将相机、成像解决方案以及嵌入式和物联网设备转换为完全符合的GigE Vision、GenICam设备。如嵌入式平台上进行AI处理后的结果,需要进一步传给后端控制器和其他系统使用,使用ebus edge,实现处理后的坐标或图像数据进行协议打包,发送。