OpenCV计算机视觉实战(19)------特征描述符详解
0. 前言
在计算机视觉系统中,如何提取和描述图像中的稳定特征点,并进行准确匹配,是图像配准、物体识别、三维重建等任务的基石。本文将从经典的 SIFT/SURF 算法原理出发,介绍 ORB 特征检测器的轻量级替代方案,最后结合特征匹配与 RANSAC 方法,实现鲁棒的点对点几何校正。
1. SIFT/SURF 算法
尺度不变特征变换 (Scale-invariant feature transform, SIFT) 和加速稳健特征 (Speeded Up Robust Features, SURF) 都是基于多尺度空间的关键点检测与描述算法,能在尺度、旋转、光照变化下保持鲁棒性。它们通过寻找高斯差分极值点、精确定位关键点,并为每个关键点生成方向分布直方图或 Haar 小波响应描述符,从而获得丰富且可匹配的特征向量。
1.1 算法对比
SIFT通过多阶高斯差分 (Difference of Gaussian,DoG) 建立尺度空间,能有效处理任意尺度与旋转变化,适用于细节丰富、尺度差异大的场景SURF用积分图像加速Haar小波响应,提取速度是SIFT的3--5倍,但对光照变化稍逊,适用于实时性要求高、特征数量适中的场景
1.2 实现过程
- 构建尺度空间:对输入图像不断应用不同
sigma的高斯模糊,并在相邻尺度图间做差 (DoG)→cv2.SIFT_create()内部实现 - 极值点检测:在
DoG空间中寻找局部3 × 3 × 3(空间 × 尺度)极大/极小点 - 关键点精确定位:对初始极值点做泰勒展开拟合,剔除低对比度与边缘响应点
- 方向分配:在关键点邻域计算梯度方向直方图,主峰方向即为关键点方向
- 生成描述符:以关键点为中心,按主方向对邻域进行旋转归一化,计算子窗口 (
4 × 4) 中8-bin梯度直方图 →128维向量 (SIFT) 或64维 (SURF)
python
import cv2
# 功能:使用 SIFT 提取并可视化关键点
img = cv2.imread('1.jpeg', cv2.IMREAD_GRAYSCALE)
# 1. 创建 SIFT 或 SURF 检测器
sift = cv2.SIFT_create()
# surf = cv2.xfeatures2d.SURF_create(400) # 需要 opencv-contrib
# 2. 检测关键点并计算描述符
keypoints, descriptors = sift.detectAndCompute(img, None)
# 3. 可视化
output = cv2.drawKeypoints(
img, keypoints, None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
cv2.imshow('SIFT Keypoints', output)
cv2.waitKey(0)
cv2.destroyAllWindows()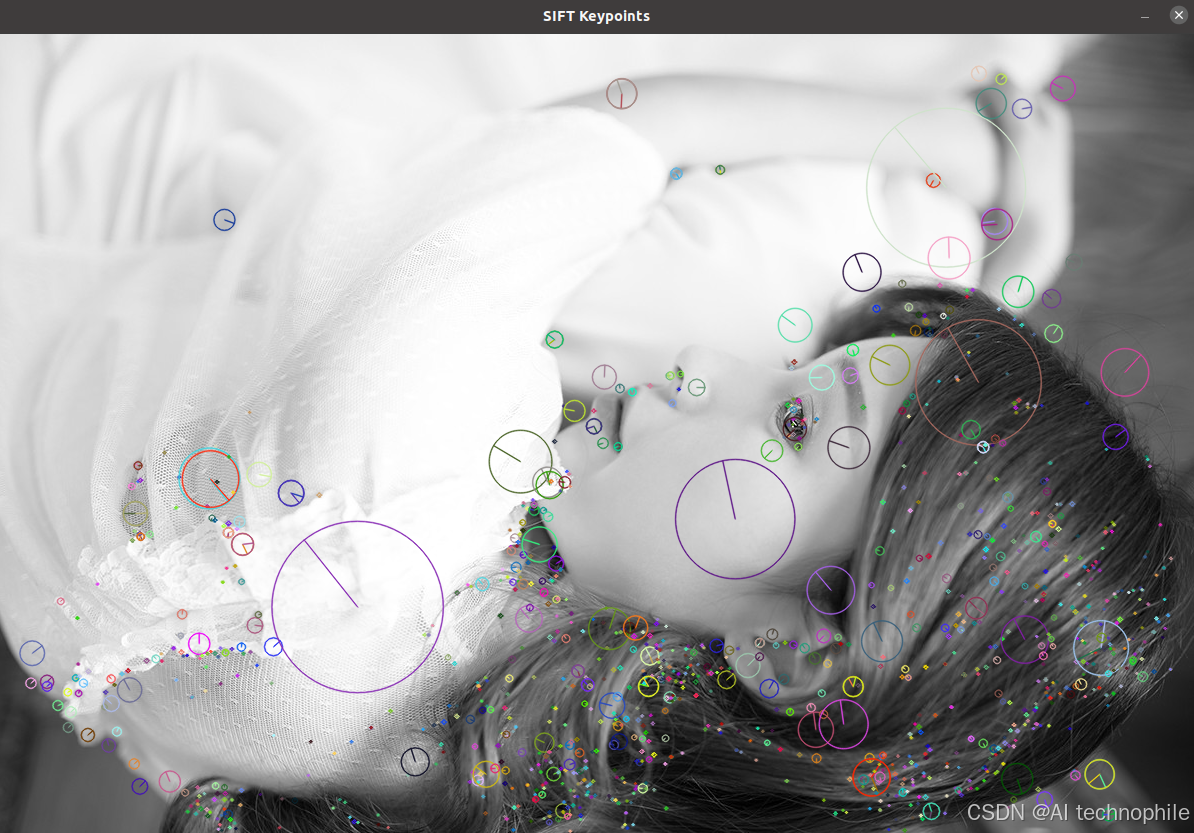
关键函数解析:
cv2.SIFT_create([nfeatures, nOctaveLayers, contrastThreshold, edgeThreshold, sigma]):创建SIFT检测器,参数可调整检测数量与灵敏度detectAndCompute(image, mask):一次调用完成关键点检测与描述符计算,返回keypoints列表与对应descriptors数组cv2.drawKeypoints():可视化关键点,可选DRAW_RICH_KEYPOINTS显示方向与尺度
2. ORB 特征检测器
ORB (Oriented FAST and Rotated BRIEF) 结合了 FAST 角点检测与 BRIEF 描述符,并对 BRIEF 进行了旋转不变性增强。它是开源且计算量小的 SIFT/SURF 替代方案,适用于实时应用和嵌入式平台。
2.1 算法优势
ORB 将 FAST 用于角点检测,BRIEF 用于描述描述生成,并引入方向与多旋转支持,其二进制描述符可用 Hamming 距离快速匹配,非常适合移动设备和实时系统。为了便于应用:
- 可先行进行
ROI分割,只在感兴趣区域运行ORB,节省计算 - 在
detectAndCompute(img, mask)使用掩码剔除背景或不关心区域 - 用
keypoint.response大小映射到圆半径,直观了解哪些点更稳定
2.2 实现过程
FAST角点检测:在图像每个像素附近使用圆形邻域快速检测角点- 方向分配:计算关键点邻域的灰度质心方向,赋予角点旋转不变性
BRIEF描述符:在关键点方向参考系下,对预定义的点对进行灰度差分,生成二进制串- 描述符长度与匹配:默认
256 bit,可通过ORB_create(nfeatures, scaleFactor, nlevels, edgeThreshold, firstLevel, WTA_K, scoreType, patchSize, fastThreshold)调整
python
import cv2
# 功能:使用 ORB 提取并可视化关键点
img = cv2.imread('1.jpeg', cv2.IMREAD_GRAYSCALE)
# 1. 创建 ORB 检测器
orb = cv2.ORB_create(
nfeatures=500, # 最多关键点数
scaleFactor=1.2, # 金字塔缩放
nlevels=8, # 金字塔层数
edgeThreshold=31,
firstLevel=0,
WTA_K=2,
scoreType=cv2.ORB_HARRIS_SCORE,
patchSize=31,
fastThreshold=20
)
# 2. 检测并计算
keypoints, descriptors = orb.detectAndCompute(img, None)
# 3. 可视化
output = cv2.drawKeypoints(img, keypoints, None, color=(0,255,0))
cv2.imshow('ORB Keypoints', output)
cv2.waitKey(0)
cv2.destroyAllWindows()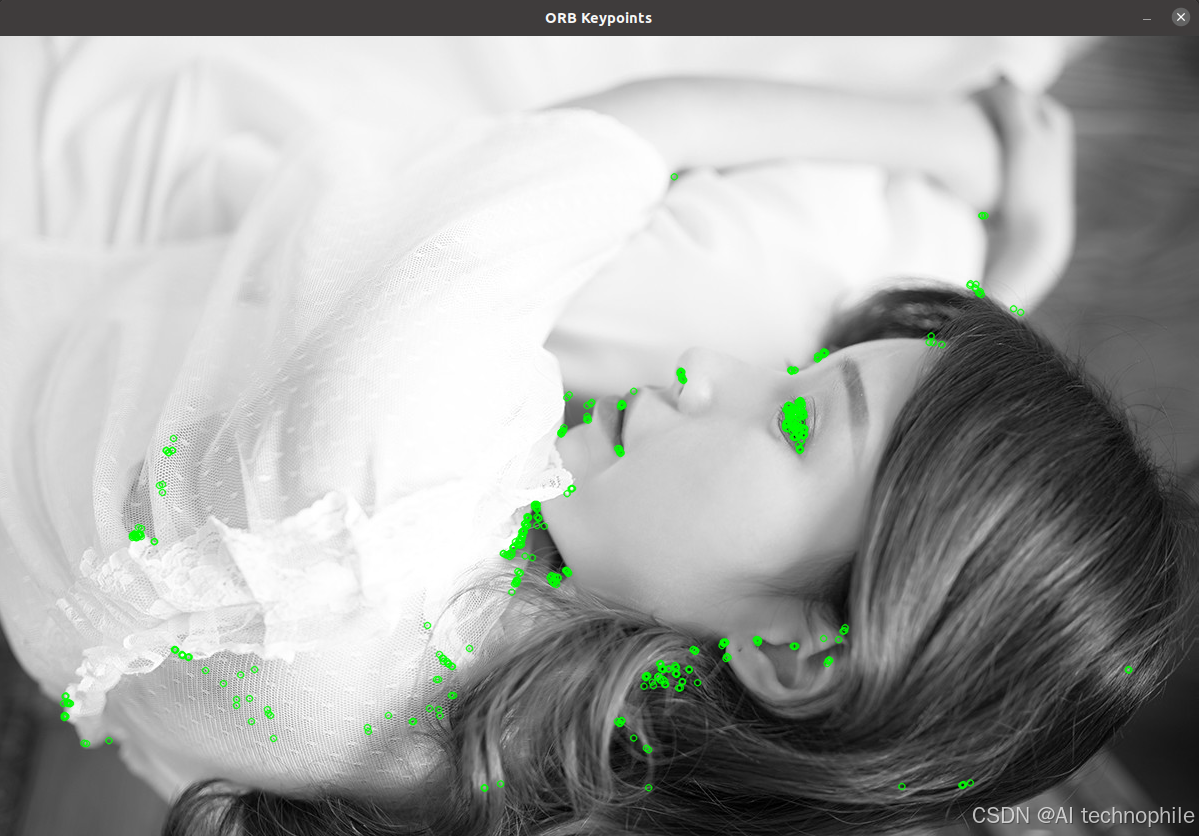
关键函数解析:
cv2.ORB_create():ORB初始化,可调节关键参数nfeatures、scaleFactor、nlevels、fastThreshold等detectAndCompute(image, mask):同步获得ORB关键点与二进制描述符ORB描述符匹配时通常使用Hamming距离
3. 特征匹配与 RANSAC
将两幅图像的特征描述符进行匹配,并利用 RANSAC 剔除错误匹配,估计两图之间的几何变换(如单应性 Homography),实现稳健的配准和拼接。
3.1 实现过程
Brute-Force或FLANN匹配器SIFT/SURF推荐L2距离;ORB推荐Hamming距离- 使用
knnMatch寻找k=2最近邻
- 比率测试 (
Lowe's Ratio Test)- 仅保留
dist1 < 0.75·dist2的匹配对
- 仅保留
RANSAC筛选cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, ransacReprojThreshold)- 返回最优单应性矩阵和内点掩码
- 可视化匹配
- 用
cv2.drawMatches绘制内点匹配对
- 用
python
import cv2
import numpy as np
# 1. 读取两幅图并提取描述符(以 SIFT 为例)
img1 = cv2.imread('4.jpeg', cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread('9.jpeg', cv2.IMREAD_GRAYSCALE)
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# 2. BFMatcher + KNN 匹配
bf = cv2.BFMatcher(cv2.NORM_L2)
matches = bf.knnMatch(des1, des2, k=2)
# 3. Lowe 比率测试
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append(m)
# 4. RANSAC 估计单应性
if len(good) > 10:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2)
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask = mask.ravel().tolist()
else:
matchesMask = None
# 5. 可视化内点匹配
draw_params = dict(matchColor=(0,255,0), singlePointColor=None,
matchesMask=matchesMask, flags=2)
result = cv2.drawMatches(img1, kp1, img2, kp2, good, None, **draw_params)
cv2.imshow('Matches with RANSAC', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
关键函数解析
cv2.BFMatcher(normType):暴力匹配器,NORM_L2用于浮点描述符,NORM_HAMMING用于二进制描述符knnMatch(des1, des2, k):返回每个描述符最接近的k个邻居Lowe's Ratio Test:剔除匹配不唯一或过于接近的匹配点cv2.findHomography(src, dst, method, ransacReprojThreshold):用RANSAC筛除离群点并估计变换矩阵,返回mask表示内点
小结
通过本文的介绍,我们系统回顾了从经典的 SIFT / SURF 到轻量级 ORB 的特征提取与描述方法,并结合特征匹配与 RANSAC 实现了鲁棒的图像几何校正。SIFT / SURF 在处理复杂纹理与尺度变化时具有极高的稳定性,而 ORB 则以其高效与可嵌入性,在实时场景中表现出色。最后,通过合理的匹配策略与 RANSAC 的离群点剔除机制,我们能够在嘈杂背景下提取出可靠的点对,实现图像的精准配准与后续处理。特征描述子的合理选择与匹配策略的优化,是构建高效视觉系统的关键基础。
系列链接
OpenCV计算机视觉实战(1)------计算机视觉简介
OpenCV计算机视觉实战(2)------环境搭建与OpenCV简介
OpenCV计算机视觉实战(3)------计算机图像处理基础
OpenCV计算机视觉实战(4)------计算机视觉核心技术全解析
OpenCV计算机视觉实战(5)------图像基础操作全解析
OpenCV计算机视觉实战(6)------经典计算机视觉算法
OpenCV计算机视觉实战(7)------色彩空间详解
OpenCV计算机视觉实战(8)------图像滤波详解
OpenCV计算机视觉实战(9)------阈值化技术详解
OpenCV计算机视觉实战(10)------形态学操作详解
OpenCV计算机视觉实战(11)------边缘检测详解
OpenCV计算机视觉实战(12)------图像金字塔与特征缩放
OpenCV计算机视觉实战(13)------轮廓检测详解
OpenCV计算机视觉实战(14)------直方图均衡化
OpenCV计算机视觉实战(15)------霍夫变换详解
OpenCV计算机视觉实战(16)------图像分割技术
OpenCV计算机视觉实战(17)------特征点检测详解
OpenCV计算机视觉实战(18)------视频处理详解