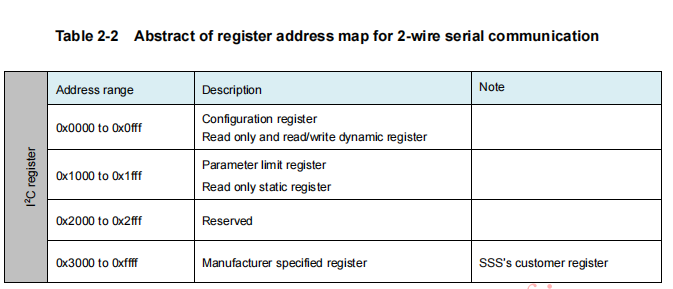
寄存器地址说明:
1 . NCK Frequency setting
这个是外部时钟设置,与MCLK一致, 这个时钟是像素时钟和mipi输出时钟的基础时钟。 我这设置的是24MHZ
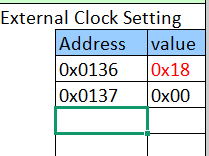
计算方式如下:
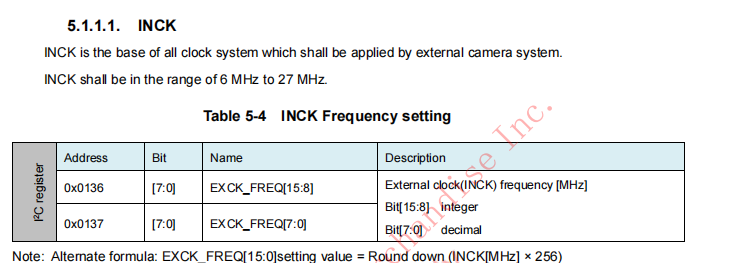
如我们是24MHZ * 256 相当于左移8位,也就是将24整数部分放置在寄存器的15:8高八位。
2. CSI 信号设置
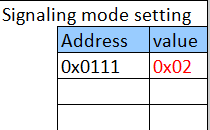
设置CSI 的PHY模式, 现与586连接的处理器上使用的是DPHY,所以我们选择DPHY模式。
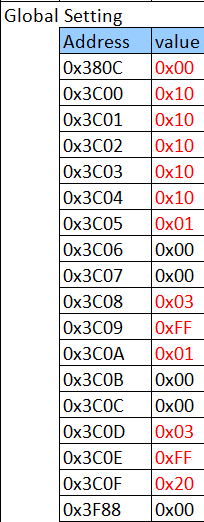
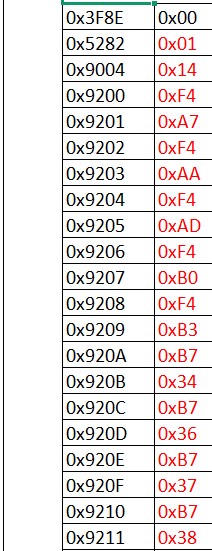
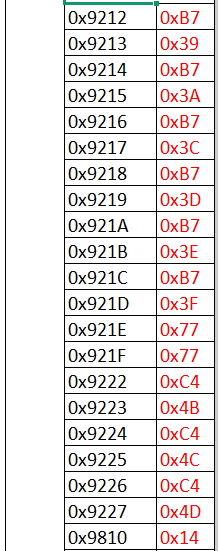
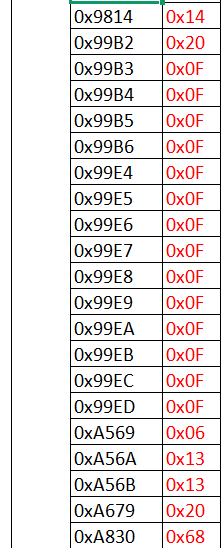
3. 全局设置
按照官方给的设置就行了,如:
MIPI输出设置
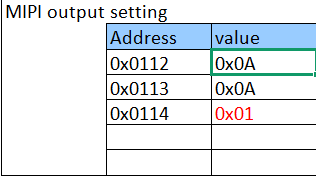
0x0112 0x0113 设置MIPI输出格式为RAW10
0x0114 设置MIPI LANE通道个数为2
行像素个数设置
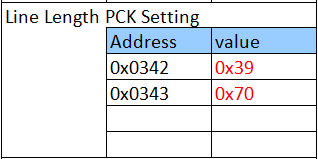
这个最终于TLine计算相关,如上:0x3970 即14704个像素。 因为586内部是按照8 pipeline进行处理的。所以计算公式如下:
TLine = 14704 / 8 / 84M(像素处理时钟) = 21.88us
帧长设置
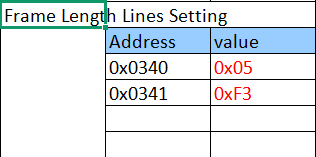
帧长为1523 行。
帧率 = 84 * 10^6 * 8 / (14704 * 1523) = 30帧
ROI区域
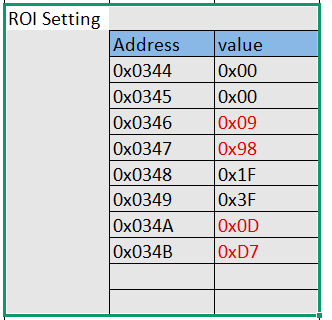
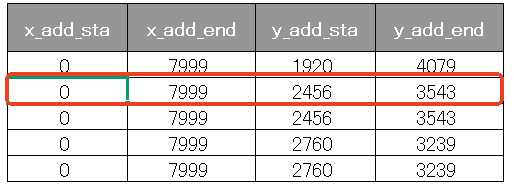
对应红色框中
模式设置
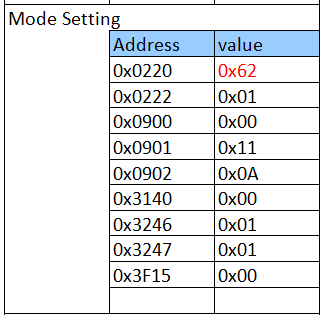
0x0220 : 0x62 表示失能HDR
0x0222 :0x01 表示短长曝光比例设置为1
0x0900 : 设置binning模式,是否使能0x00,不使能。
0x0901 : 0x11 设置binning的格式,0x11表示不binning
0x0902 : 0x0A binning的比重,平均或者求和等。
0x3140 : 0x00 HDR功能选择,0x00 表示不选择,0x04表示选择
0x3246 :binning优先级,0x01表示不binning,0x81表示2 × 2 Adjacent Pixel Binning, QBC HDR , 0x89表示V2H2
0x3247 : binning优先级,0x01表示不binning,0x81表示2 × 2 Adjacent Pixel Binning, QBC HDR , 0x89表示V2H2
0x3F15 : ADC模式,默认使用0x00正常ADC模式
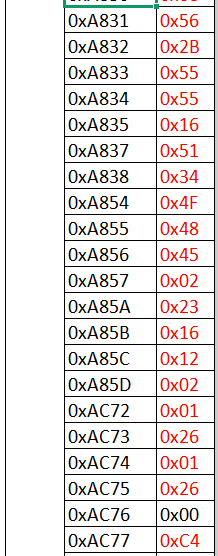
裁剪或者收缩
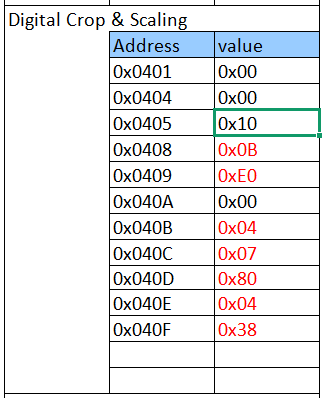
0x0401:缩放使能开关, 0x00 失能, 0x01使能
0x0404:缩放比例 范围是16 - 511
0x0405:缩放比例 范围是16 - 511
0x0408: crop 图的X起点高字节 0x0B
0x0409: crop 图的X起点低字节 0xE0 起始点为3040
0x040a: crop 图的Y起点高字节 0x00
0x040b: crop 图的Y起点低字节 0x04 起始点为4
0x040c: crop 图的宽度高字节 0x07
0x040d: crop 图的宽度低字节 0x80 宽度 1920
0x040e: crop 图的高度高字节 0x04
0x040f: crop 图的高度低字节 0x38 高度 1080
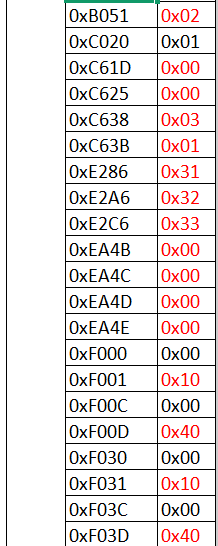
输出大小设置
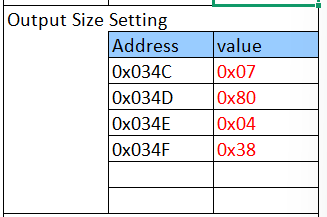
输出的宽度为1920,输出的高度为1080
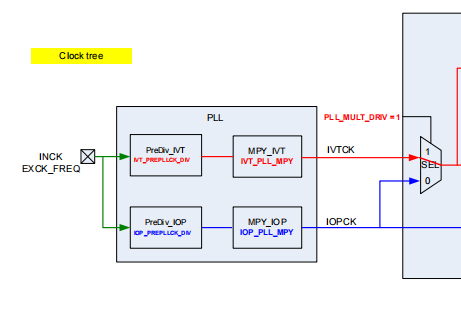
时钟设置
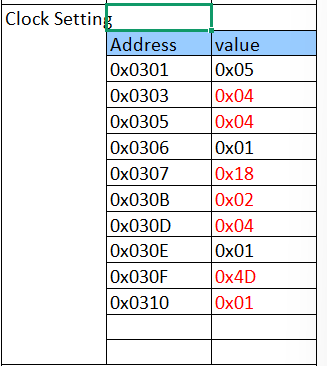
像素时钟分频值:
0x303: 系统时钟分频值
0x301: 像素设置分频值
倍频后的时钟再分频:
1680MHz / 4 / 5 = 84M
像素高速时钟
0x305:预分频0x04
0x306: 倍频
0x307: 倍频 0x118
如: 24MHz / 4 * 0x118 = 1680MHz
系统时钟分频值:
0x030B:分频值为2
0x030D: 预分频0x04
0x030E:倍频
0x030F:倍频 0x14D 即333
如: 24MHz / 4 * 333 = 1998MHz
分频 1998 / 2 = 999MHz
0x0310: 表示使用双频还是单频,就是像素高速时钟和系统高速时钟使用一个还是分开使用。
如下:
#其他设置 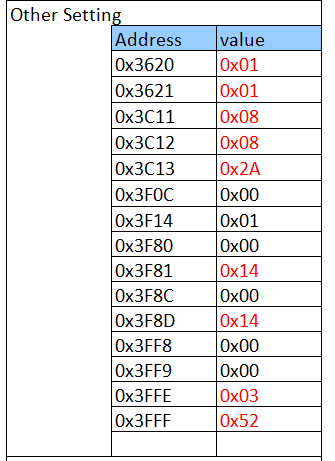
0x3620: QBC重新马赛克使能
0x3621: QSC使能
0x3F0C:失能PDAF自动对焦功能
0x3F14:HDR模式失能
曝光设置
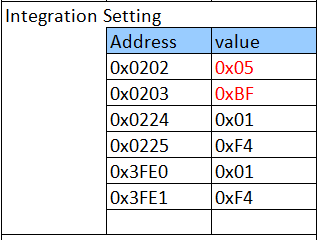
0x0202: 长曝光设置高八位
0x0203: 长曝光设置第八位 以行为单位
0x0224: 短曝光高八位
0x0225: 短曝光低八位
0x3FE0:中曝光高八位
0x3FE1:中曝光第八位
增益设置
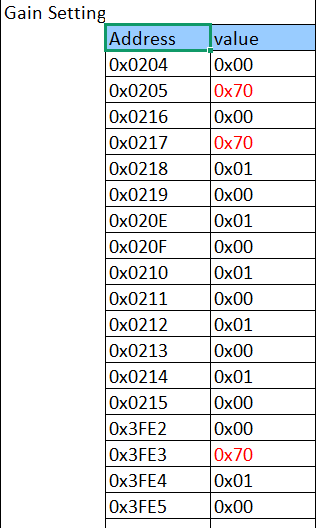
0x0204: 模拟增益针对长曝光高八位
0x0205: 模拟增益针对长曝光低八位
0x0216:模拟增益针对短曝光高八位
0x0217:模拟增益针对短曝光低八位
0x0218:数字增益针对短曝光高八位
0x0219:数字增益针对短曝光低八位
0x020E:数字增益针对长曝光高八位
0x020F:数字增益针对长曝光低八位
0x0210:数字增益针对R高八位
0x0211:数字增益针对R低八位
0x0212:数字增益针对B高八位
0x0213:数字增益针对B低八位
0x0214:数字增益针对G高八位
0x0215:数字增益针对G低八位
0x3FE2:模拟增益针对中曝光高八位
0x3FE3:模拟增益针对中曝光低八位
0x3FE4:数字增益针对中曝光高八位
0x3FE5:数字增益针对中曝光低八位