12_ROS2项目构建_创建工作空间_哔哩哔哩_bilibili
通过网盘分享的文件:ROS2机器人零基础从入门到实战.pdf
链接: https://pan.baidu.com/s/13OdFL6Mn9L8QwbPBWyXHPw
提取码: wqx4

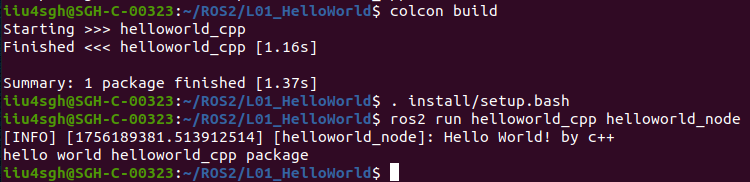
cpp
#include "rclcpp/rclcpp.hpp"
#include <cstdio>
int main(int argc, char ** argv)
{
rclcpp::init(argc,argv);// init ros2
auto node = rclcpp::Node::make_shared("helloworld_node");//create one node
RCLCPP_INFO(node->get_logger(),"Hello World! by c++");
rclcpp::shutdown();//release resource
printf("hello world helloworld_cpp package\n");
return 0;
}
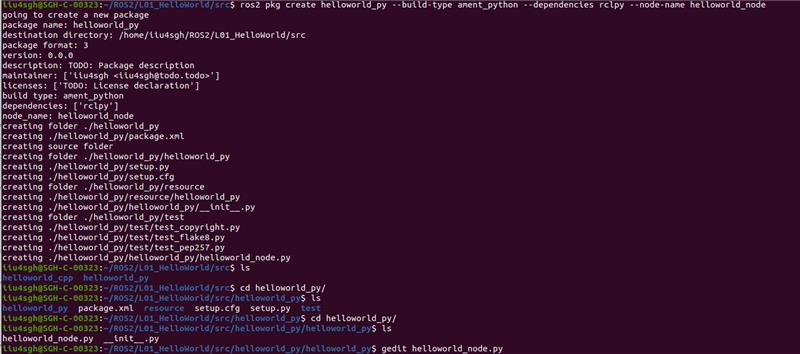
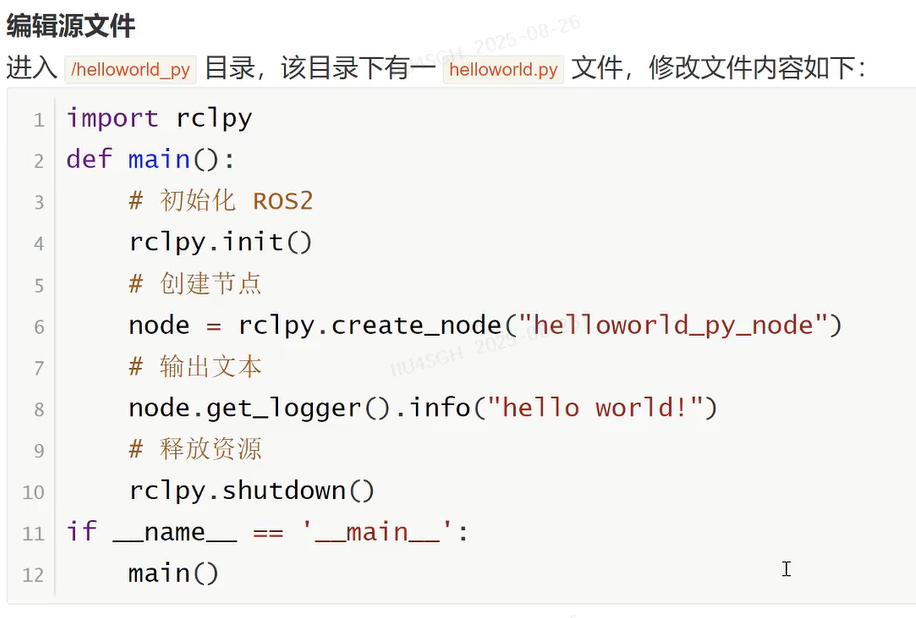
python
import rclpy
from rclpy.node import Node
def main():
rclpy.init()
node = rclpy.create_node("helloworld_py")
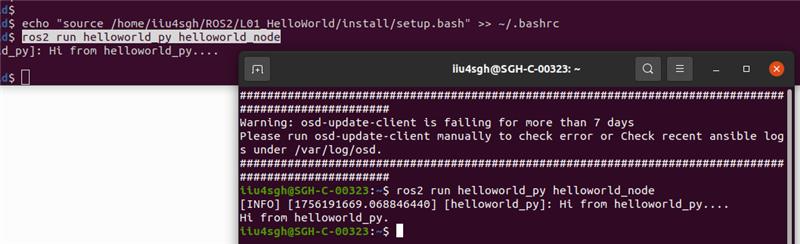
node.get_logger().info("Hi from helloworld_py....")
print('Hi from helloworld_py.')
rclpy.shutdown()
if __name__ == '__main__':
main()