1、注册
需要手机号,邮箱,工作单位
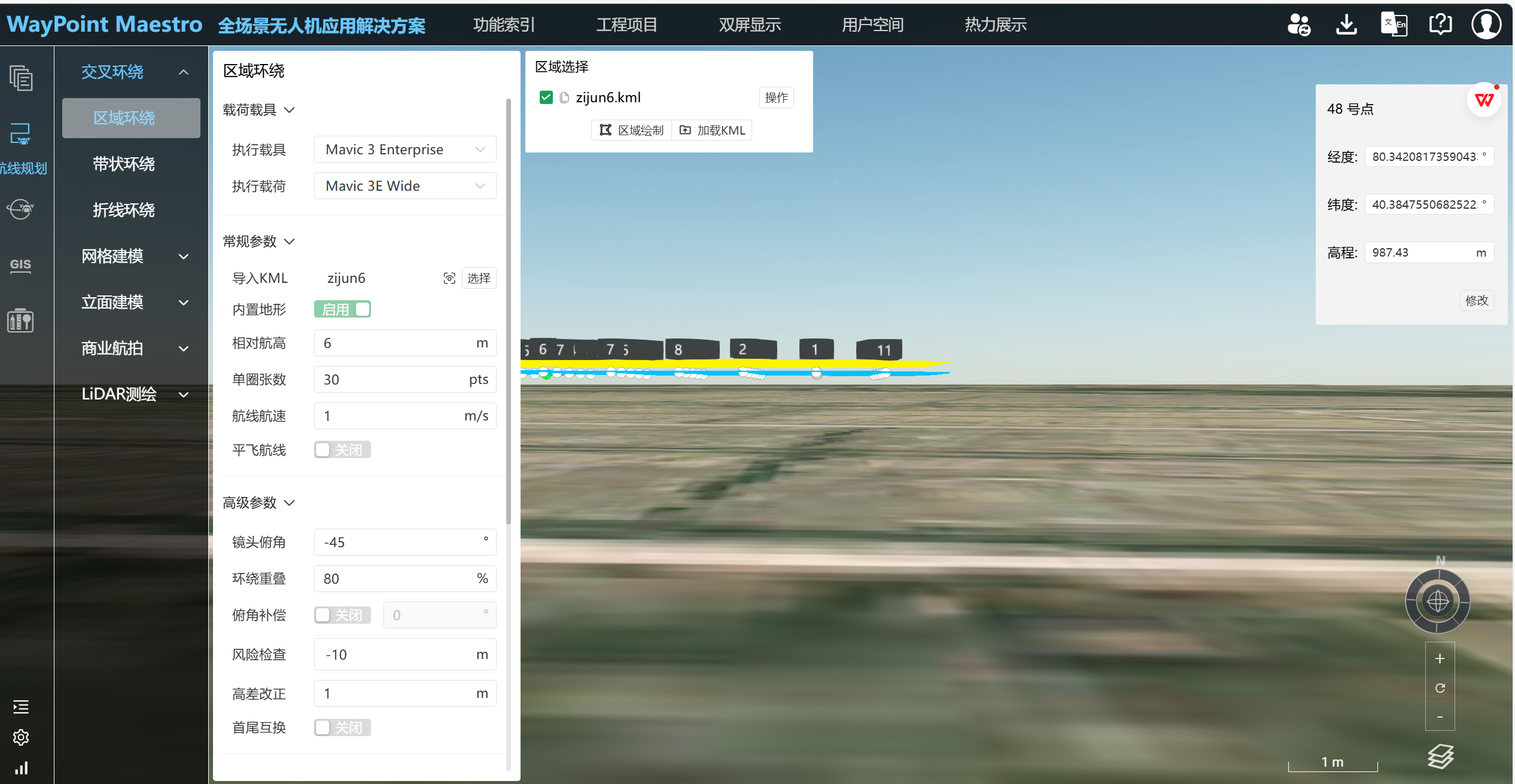
2、交叉环绕
航线规划-交叉环绕-区域环绕
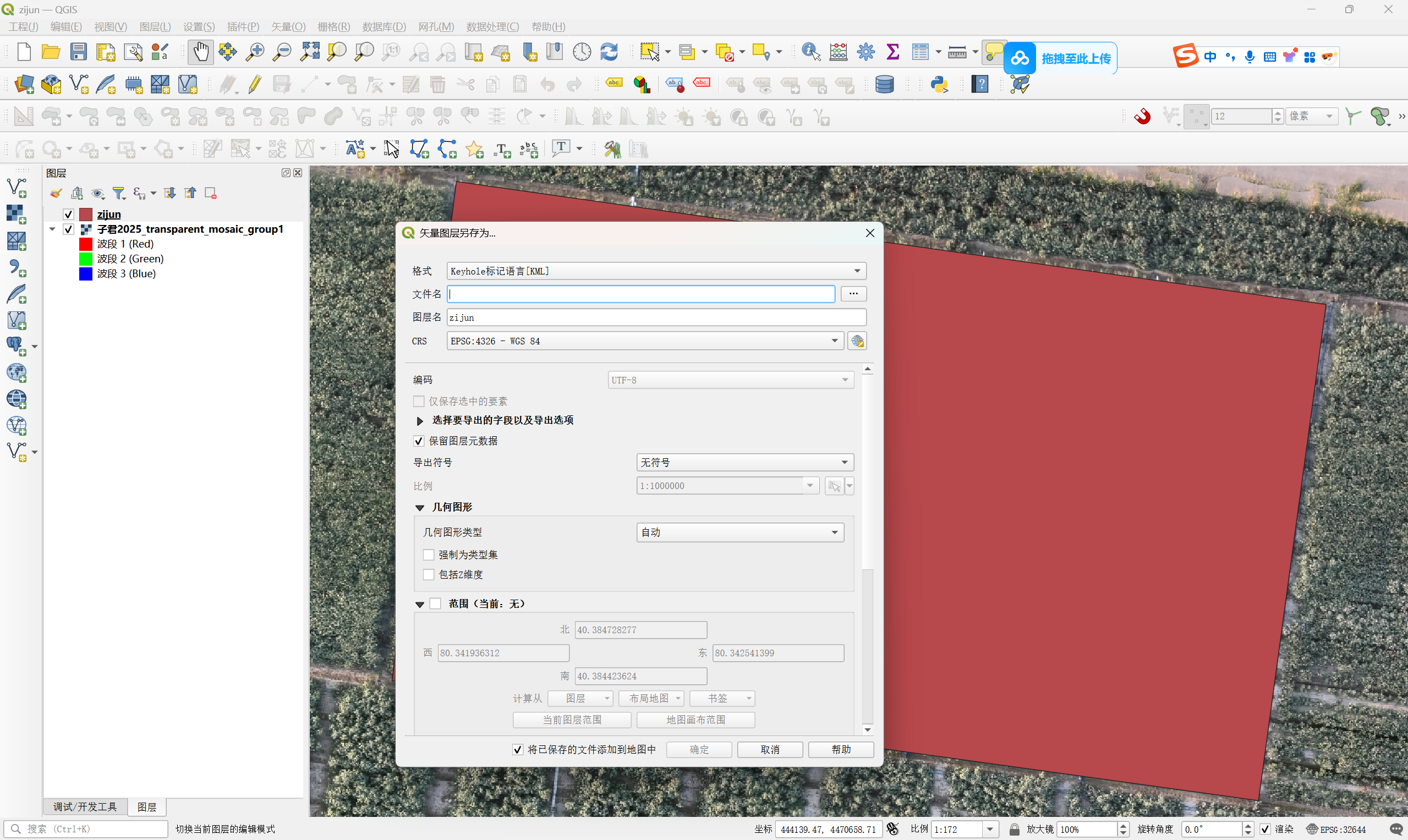
3、KML文件生成
拍摄正射影像--精确画出区域的shp文件-右键导出-要素另存为-保存为KML文件
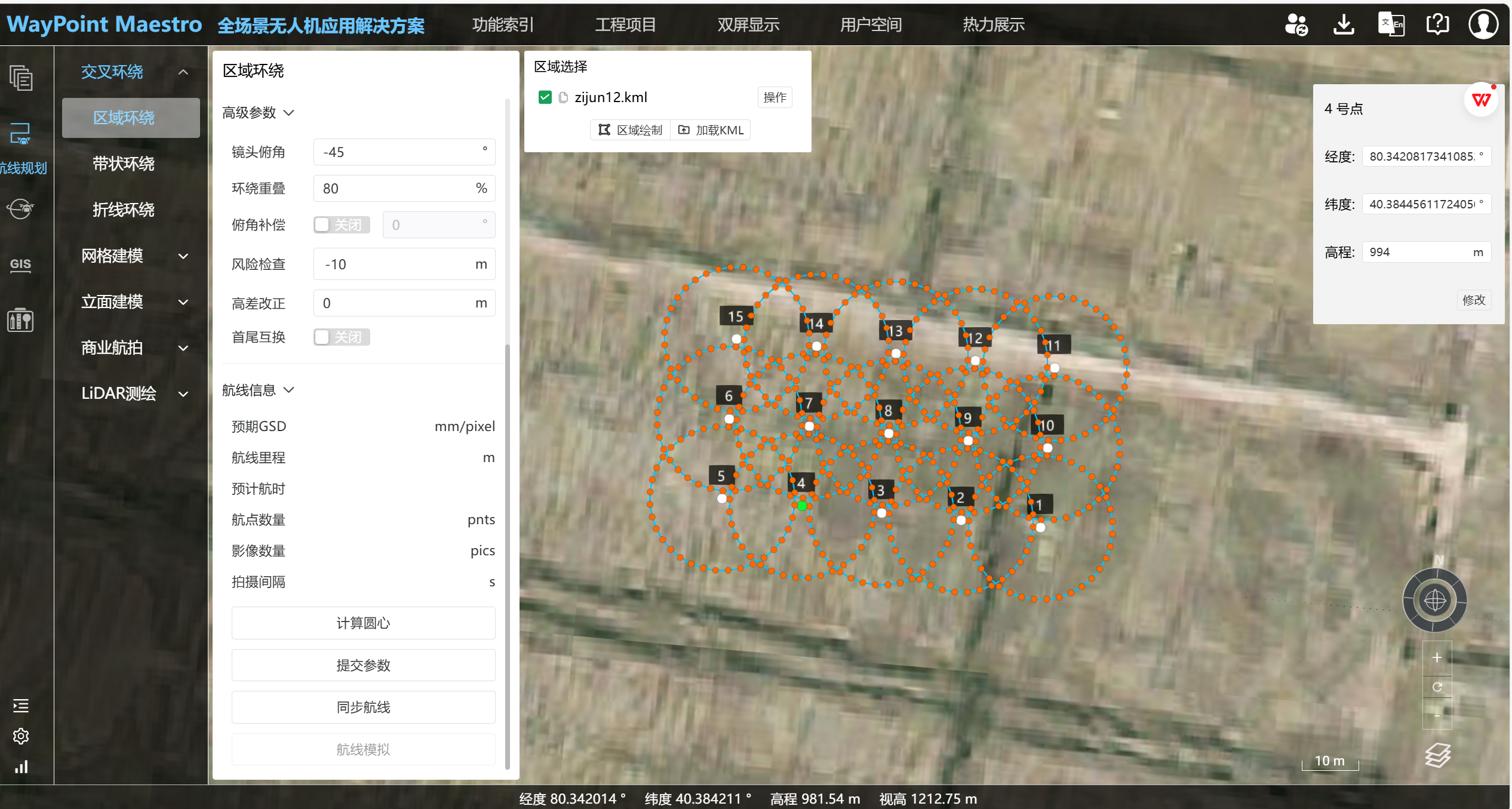
3、参数选择
执行载具:以Mavic3为例,选择Mavic3企业版
执行载荷:Mavic3E wide
导入KML: 有两种方式:1区域画点 2:KML文件导入,一般要求比较精确的会选择KML文件导入
相对航高:6
单张圈数:30
航线速度:1
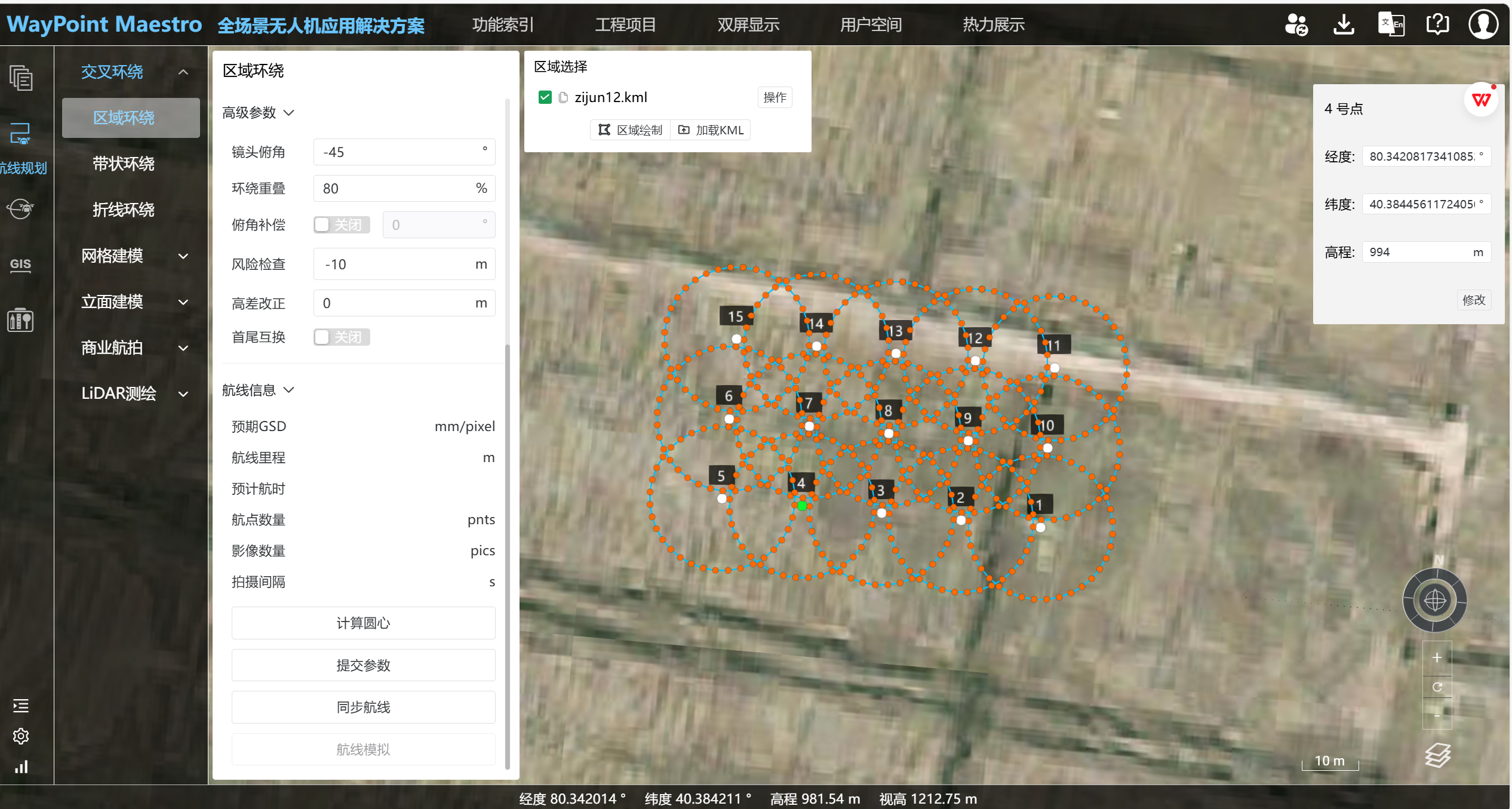
平飞航线:这个参数有的可以选择:在后续计算中不会出现航点错误,有的选择会出现航点错误,目前不知道什么原因,但是当出现错误时,我们就根据图中的高程进行点的修改:以下图为例,点击计算圆心,出现下图倾斜摄影交叉环绕的圈圈,点击线下面绿色的点,可以看到最下面的高程,比如4号点,修改为981.54+设计的相对航高6m=987.54
高级参数修改:
镜头俯角-45
重叠度:80%
风险检查:这个可以修改,只要不出错误,0也可以,我们用的-10
高差改正:因为我修改的是1m,所以高差改正选择了1
点击计算圆心-提交参数-同步航线
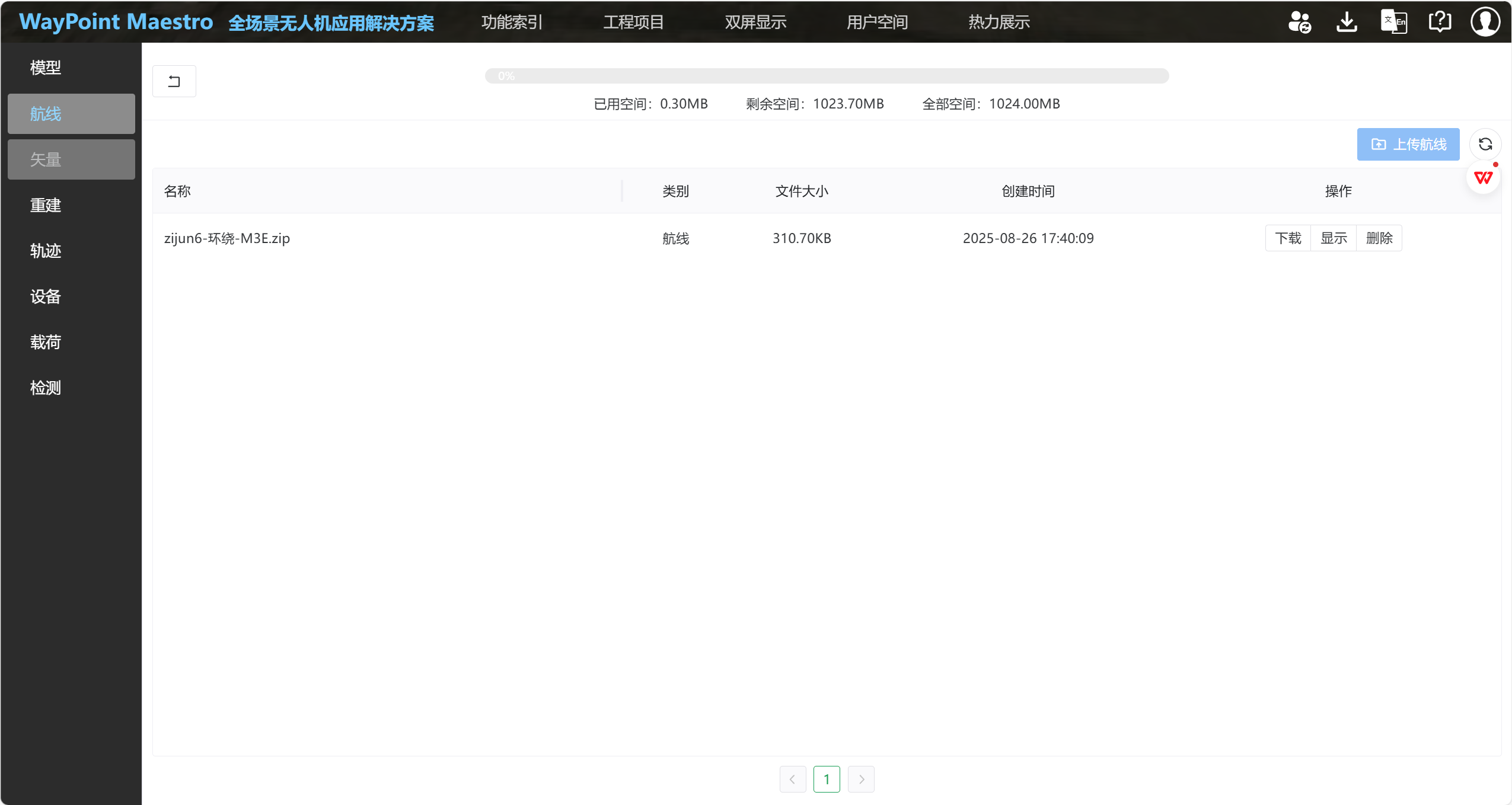
4、航线显示
点击:用户空间-航线,可以查看显示生成的航线。亦可以点击显示,清楚看出航线
5、导入遥控器
以Mavic3为例,打开遥控器,利用遥控器自带的浏览器下载WPMaestro,登录账号,KML文件即可下载到遥控器,打开遥控器DJI航线规划软件-导入航线-找到即可导入,另外,编辑航线,其他参数不变,只选择改变相机拍摄方式
