0 序
0.0 研读背景
GB/T 40429《汽车驾驶自动化分级/Taxonomy of driving automation for vehicles》,作为智能网联汽车行业 -自动驾驶领域的核心标准之一,有必要进行深入阅读和熟悉,以便笔者、读者(汽车行业的研发工程师)理解和开展日常相关的软件开发工作。
0.1 标准简介
-
2021年8月20日,由工业和信息化部 提出、全国汽车标准化技术委员 会归口的
GB/T 40429-2021《汽车驾驶自动化分级 》推荐性国家标准 由国家市场监督管理总局 、国家标准化管理委员 会批准发布(国家标准公告2021年第11号文),将于2022年3月1日起实施。 -
该标准为《国家车联网产业标准体系建设指南(智能网联汽车) 》规划的分类和编码类推荐性国家标准项目 (体系编号102-3),规定了汽车驾驶自动化分级遵循的【原则】、【分级要素】、各级别【定义】和【技术要求框架】,旨在解决我国汽车驾驶自动化分级的【规范性】问题。
0.2 制订背景
-
汽车驾驶自动化 是全球汽车技术及产业的重要发展趋势,在为人们提供更加安全、舒适以及顺畅的出行方式与物流解决方案的同时,不断与人工智能、信息通信、智慧城市与交通等技术深度融合,正在重塑汽车及相关产业的生态体系和价值链体系。
-
近年来,国际及主要汽车产业国家和地区的标准法规组织 广泛开展汽车驾驶自动化分级的研究。
- 美国 高速公路安全管理局(
NHTSA)在2013年率先提出将汽车驾驶自动化 分为无自动化 、特定功能自动化 、组合功能自动化 、有条件自动化 和完全自动化共5个等级;- 德国 联邦交通研究所(
BASt)根据研究,将汽车驾驶自动化 分为仅驾驶员 、辅助驾驶 、部分自动驾驶 、高度自动驾驶 以及完全自动驾驶共5个等级;- 国际自动机工程师学会 (
SAE-International)发布的SAE J3016标准提出了0-5级分类法,将汽车驾驶自动化 分为从无驾驶自动化 (0级)直至完全驾驶自动化 (5级)在内的6个等级;- 国际标准化组织 (
ISO)与SAE组成国际标准联合起草组 ,正在制定ISO 22736《道路机动车辆驾驶自动化系统相关术语的分级和定义 》并已完成FDIS投票,有望于2021年内发布;- 联合国世界车辆法规协调论坛 (
UN/WP.29)于2019年专门就驾驶自动化分级 的法规制定原则展开讨论,确定了区分驾驶辅助 和自动驾驶 制定相关国际技术法规的方案。其中,SAE J3016是国际上影响最大、应用最广泛的分级标准,截至目前已发布4个版本:- 2014版,首次提出0-5级分类框架和原则
- 2016版,主要增加设计运行范围(ODD)定义并具体说明动态驾驶任务(DDT)等内容
- 2018版和2021版,主要完善术语描述并对标准使用中的常见问题进行解释说明。
SAE J3016有关驾驶自动化分级 的概念一经提出便引起各方关注,被包括我国在内的全球汽车产业广泛应用。
- 然而,由于
SAE J3016基于国外技术及产业实践 制定,造成了我国汽车行业对于分级的理解不准确、定义不统一、应用不规范 ,在一些文件中使用的分级概念 甚至与其参考标准的制定初衷存在较大差异,给政府行业管理 、企业产品开发及宣传 、消费者认知及使用等带来不便。- 在政策和市场的双擎牵引下,我国汽车驾驶自动化技术 发展迅速,产业模式 正在示范应用 中不断走向成熟,企业的产品量产计划 全面提上日程,亟需制定我国自主的汽车驾驶自动化分级标准。
- 2017年,由工业和信息化部 提出,汽标委 【智能网联汽车分标委】组织行业骨干单位启动了该标准的研制工作。
0.3 制定情况及过程
- 标准任务下达后,在工业和信息化部 指导下,汽标委智能网联汽车分标委 统筹开展国内外技术产业情况 调查,充分调动行业资源 开展分级规则研究 ,广泛听取行业意见,充分借鉴国际相关经验,顺利完成标准的预研、立项、审查及报批 等工作,最终经工业和信息化部 审核公示、国家市场监管总局批准发布。标准的制定主要遵循两方面原则:
- 一,发挥企业主体 作用,广泛听取社会意见。
本标准由重庆长安 汽车股份有限公司和中国汽车技术研究 中心有限公司联合牵头,组织整车制造、系统部件开发及检测认证机构等智能网联汽车产业各相关方成立核心起草组,共同开展标准研究制定。
标准制定过程中多次组织专题研讨,草案形成后以公开和定向等多种形式面向工作组、行业企业及社会公众征求意见,累计超过200家单位参与了标准的讨论与意见反馈,处理相关意见近300条。该标准的制定客观反映了行业实际需求,切实发挥了企业主体作用,充分听取了社会公众意见。
- 二,积极采用国际共识 ,切实结合我国国情。
在充分研究国际各类分级标准 、广泛听取行业意见的基础上,起草组 决定参照国际普遍认可的
SAE J3016的0-5级分类框架 ,确保分级的基本原则与国际普遍采用标准的内容保持协调;同时根据我国国家标准制定规则、汽车产业情况和标准实施环境,精简描述用语、优化分级名称、强化安全要求,提升标准的科学性和可实施性。
标准的制定过程中形成的中国方案和经验也为相关国际标准法规的制定做出了贡献。
0.3 主要内容
- (一)标准范围
本标准规定了汽车驾驶自动化功能的分级。本标准适用于具备驾驶自动化功能的M类、N类汽车,其他类型车辆可参照执行。
- (二)分级原则
基于驾驶自动化系统能够执行动态驾驶任务的程度,根据在执行动态驾驶任务中的角色分配以及有无设计运行范围限制,将驾驶自动化分成0级至5级。
- (三)分级要素
基于以下6个要素对驾驶自动化等级进行划分:
- 是否持续执行动态驾驶任务中的目标和事件探测与响应;
- 是否持续执行动态驾驶任务中的车辆横向或纵向运动控制;
- 是否同时持续执行动态驾驶任务中的车辆横向和纵向运动控制;
- 是否持续执行全部动态驾驶任务;
- 是否自动执行最小风险策略;
- 是否存在设计运行范围限制。
- (四)级别定义
在汽车驾驶自动化的6个等级之中,0-2级为驾驶辅助,系统辅助人类执行动态驾驶任务,驾驶主体仍为驾驶员;3-5级为自动驾驶,系统在设计运行条件下代替人类执行动态驾驶任务,当功能激活时,驾驶主体是系统。各级名称及定义如下:
- 0级驾驶自动化(应急辅助,emergency assistance)系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。
- 1级驾驶自动化(部分驾驶辅助,partial driver assistance)系统在其设计运行条件下持续地执行动态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。
- 2级驾驶自动化(组合驾驶辅助,combined driver assistance)系统在其设计运行条件下持续地执行动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。
- 3级驾驶自动化(有条件自动驾驶,conditionally automated driving)系统在其设计运行条件下持续地执行全部动态驾驶任务。
- 4级驾驶自动化(高度自动驾驶,highly automated driving)系统在其设计运行条件下持续地执行全部动态驾驶任务并自动执行最小风险策略。
- 5级驾驶自动化(完全自动驾驶,fully automated driving)系统在任何可行驶条件下持续地执行全部动态驾驶任务并自动执行最小风险策略。
0.4 重要内容释义
1. 从服务"人类"的角度对驾驶自动化分级进行界定。
SAE J3016为便于描述人和系统在不同驾驶自动化级别中的动态驾驶任务及责任关系,不仅界定了系统需要承担的动态驾驶任务,也对人类需要承担的任务和责任做了相应规定。
本标准以汽车及其驾驶自动化系统为标准化对象,不适合照搬SAE J3016在对汽车及驾驶自动化系统的功能、任务界定的同时也对人提出相应要求的模式。
因此,本标准在界定驾驶自动化级别时,只将系统需要承担的动态驾驶任务和责任纳入规范性要素予以规定,并与此对应将"人和系统的责任划分"以及"对人的要求"的相关内容均转化为注和资料性附录,保证了标准支撑专业技术开发及应用的规范性,又为消费者等非专业技术人员理解本标准提供了帮助。
2. "驾驶自动化"与"自动驾驶"是两个不同的概念。
- 与
SAE J3016类似,本标准规定的是驾驶自动化分级 ,即根据驾驶自动化系统 所能执行的驾驶任务情况,将驾驶自动化功能分为不同的等级。
- 其中,
0-2级统称为"驾驶辅助 (Driving Assistance)",属于低级别的驾驶自动化功能;3-5级统称为"自动驾驶 (Automated Driving)",属于高级别 的驾驶自动化功能。因此,可以认为"自动驾驶 "对驾驶自动化分级结果的描述,是对高级别(3-5级)驾驶自动化功能的统称。
3. 驾驶自动化"功能"不等同于驾驶自动化"能力"。
- 本标准的主要定位是对汽车驾驶自动化功能进行分级,对不同级别的驾驶自动化系统需要承担的驾驶任务进行界定,但不能用于评价驾驶自动化能力和水平。
- 汽车驾驶自动化系统的能力评价需要综合考虑驾驶自动化功能级别和对应的设计运行条件两个因素,单独采用其中任何一个因素评价驾驶自动化能力都是不合适的。
- 因此,不能简单的认为驾驶自动化级别高的系统就一定比级别低的系统能力强,而是要将系统对应的设计运行条件考虑在内,在相同功能级别前提下比较设计运行条件大小或在相同设计运行条件前提下比较功能级别才有实际价值。
- 否则,脱离设计运行条件,单纯强调驾驶自动化级别缺乏科学性,也是没有意义的。
4. 驾驶自动化等级命名更符合我国实际、更直白易懂。
- 一是,将0级命名为"应急辅助"并要求其至少有目标或事件探测能力,可兼具非持续性控制。
SAE J3016在驾驶自动化分级中纳入"无自动化"并定义为0级,存在逻辑上的争议;
同时,其纳入0级范畴的前方碰撞预警(FCW)、自动紧急制动(AEB)、车道偏离预警(LDW)等均具有一定"自动化"属性且多应用于安全应急场景。
本标准将上述功能纳入0级并命名为"应急辅助",既符合技术实际,又解决了分级逻辑上的争议问题。
- 二是,将2级命名由"部分驾驶自动化 "修改规范为"组合驾驶辅助"。
SAE J3016将2级命名为"部分驾驶自动化",但划归"驾驶辅助"范畴,容易造成理解和认知上的混淆。
本标准从级别名称上就明确强调2级驾驶自动化属于"驾驶辅助"范畴,划清与自动驾驶的界限,避免产生误解与误用,同时,准确对应了2级驾驶自动化功能兼具横纵向组合控制的特征。
三是,提出设计运行条件(ODC)的概念,将设计运行范围(ODD)、驾乘人员状态和车辆状态统一纳入驾驶自动化系统激活和运行的综合条件描述,更符合技术逻辑和产品设计实际。
5. 在各驾驶自动化等级中突出强化安全理念和要求。
- 针对国内外发生的驾驶自动化相关交通事故,本标准在各驾驶自动化级别中相应强化了安全性因素。
例如,针对3级驾驶自动化系统提出"适时采取减缓车辆风险的措施"的技术要求。
在这种情况下,即使需要依赖驾驶员进行接管的3级驾驶自动化系统,在设计时也应考虑风险减缓措施 ,从而最大程度的保障车辆运行的安全性。
我国标准关注驾驶自动化安全性 的理念和原则得到国际同行的认可与重视,在2021版
SAE J3016中也有所体现。
0.5 实施建议
- 《汽车驾驶自动化分级 》为推荐性国家标准,推荐标准实施过程中的各相关方按需使用。
政府相关主管部门、标准化机构、行业企业和消费者是本标准的实施主体,建议按照如下原则开展实施工作:
-
- 政府主管部门 以本标准为支撑,明确汽车驾驶自动化功能 、系统或车辆的监管对象 ,精准实施监管政策 ,推动相关法律法规制 修订,完善标准体系构建,有效规范汽车驾驶自动化技术发展。
-
- 标准化机构 以本标准为框架,优化完善智能网联汽车标准体系 ,加快推动关键标准 制定,适时开展标准宣贯 ,并根据发展需求及时修订完善,增强对于产业实际的匹配度,为支撑主管部门管理、促进行业发展、参与国际协调奠定坚实基础。
-
- 行业企业积极落实标准实施义务,主动采用本标准,切实遵循标准要求分类、分级开发产品,积累应用实践经验,严格规范产品宣传,避免在驾驶自动化等级或能力方面诱导、夸大或不实宣传,建立驾驶员/用户信息告知及应用培训体系,帮助消费者正确理解、使用相关功能和服务。
-
- 消费者在该标准的指导下,充分理解各级别的内涵,尤其是要正确识别驾驶自动化系统驾驶任务转移过程及可能存在的风险,并合法依规使用驾驶自动化系统,严格按照系统的设计运行条件及使用要求进行操作,避免对于功能的误用和滥用,为自己的生命、财产安全负责。
《汽车驾驶自动化分级 》作为智能网联汽车领域 重要的基础性国家标准 ,旨在通过技术要求框架的差异性比较对不同等级进行区分,具体技术指标要求则以其他标准另行规定,乘、商用车
AEB、LKA(0级)系统的标准已发布实施,部分驾驶辅助 (1级)、组合驾驶辅助 (2级)系统的标准已提交或完成立项,自动驾驶 (3级及以上)系统的相关标准正在制定过程中。分级标准的发布实施将有效支撑行业管理、助力标准体系建设、规范企业开发和宣传、增进消费者理解及产品的市场接受度,对提升公共交通安全和促进产业规范有序发展具有重要意义。
0.6 基本信息
- 国家标准全文公开系统 URL
- 中文标准名称:汽车驾驶自动化分级
- 英文标准名称:Taxonomy of driving automation for vehicles
- 标准状态:现行
- 实施日期:2022-03-01
- 发布日期:2021-08-20
- 发布机构
- 国家市场监督管理总局
- 中国国家标准化管理委员会
- 主管部门 / 提出机构:工业和信息化部
- 归口机构:工业和信息化部 / 全国汽车标准化技术委员会(SAC/TC 114)
- 依据文档:
- GB/T 1.1-2009 / 标准化工作导则
- SAE J3016 / 驾驶自动化分级
- ...
- 起草单位
- 重庆长安汽车股份有限公司
- 中国汽车技术研究中心有限公司
- 广州汽车集团股 份有限公司
- 浙江吉利汽车研究院有限公司
- 东风汽车集团有限公司
- 宝马(中国)服务有限公司
- 东风商 用车有限公司
- 浙江亚太机电股份有限公司
- 大众汽车(中国)投资有限公司
- 东软睿驰汽车技术(沈阳) 有限公司
- 福特汽车(中国)有限公司
- 主要起草人:
- 梁锋华、王兆、陈达兴、孙航、黄亮、霍克、陈文波、张行、吴坷、夏露、蒋学锋、张飞燕、 陈波雷、刘威、向小丽。
0.7 总体目录
- 1 范围
- 2 术语和定义
- 3 驾驶自动化分级
- 3.1 驾驶自动化分级原则
- 3.2 驾驶自动化等级划分要素
- 3.3 驾驶自动化等级划分
- 3.3.1
0级驾驶自动化- 3.3.2
1级驾驶自动化- 3.3.3
2级驾驶自动化- 3.3.4
3级驾驶自动化- 3.3.5
4级驾驶自动化- 3.3.6
5级驾驶自动化

1 范围
- 本标准规定了汽车驾驶自动化功能的分级。
- 本标准适用于具备驾驶自动化功能的 M类、N 类汽车,其他类型车辆可参照执行。
2 术语和定义
- 下列术语和定义适用于本文件
2.1 驾驶自动化 driving automation
车辆以 自动的方式持续地执行部分或全部动态驾驶任务的行为。
2.2 驾驶自动化系统 driving automation system
由实现驾驶自动化的硬件和软件所共同组成的系统。
2.3 驾驶自动化功能 driving automation feature
驾驶自动化系统在特定的设计运行条件内执行部分或全部动态驾驶任务的能力。
注:一个驾驶自动化系统可实现一个或多个驾驶自动化功能,每个功能与具体的驾驶 自动化等级和设计运行条件 关联。 为了准确描述驾驶自动化系统的能力,需要同时明确其驾驶自动化等级和设计运行条件。
2.4 动态驾驶任务 dynamic driving task / DDT
- 除策略性功能外的车辆驾驶所需的感知、决策和执行等行为,包括但不限于:
------车辆横向运动控制;
------车辆纵向运动控制;
------目标和事件探测与响应;
------驾驶决策;
------车辆照明及信号装置控制。
注 1 :策略性功能如导航、行程规划、目 的地和路径的选择等。
注 2:动态驾驶任务一般由驾驶员、驾驶自动化系统或由两者共同完成。
2.5 车辆横向运动控制 lateral vehicle motion control
- 动态驾驶任务中沿着 Y 轴(如图 1 所示)的实时车辆运动控制。
2.6 车辆纵向运动控制 longitudinalvehiclemotioncontrol
- 动态驾驶任务中沿着 X 轴(如图 1 所示)的实时车辆运动控制。
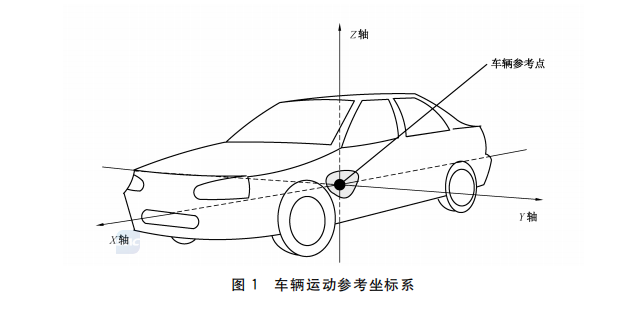
图1 车辆运动参考坐标系
2.7 目标和事件探测与响应 object and event detection and response / OEDR
对目标和事件进行探测,并进行适当的响应。
2.8 最小风险状态 minimal risk condition / MRC
车辆事故风险可接受的状态。
2.9 最小风险策略 minimal risk maneuver / MRM
驾驶自动化系统无法继续执行动态驾驶任务时,所采取的使车辆达到最小风险状态的措施。
2.10 动态驾驶任务后援 dynamic driving task fallback
当发生即将超出设计运行范围、驾驶自动化系统失效或车辆其他系统失效等不满足设计运行条件 的情况时,由用户接管或由驾驶自动化系统执行最小风险策略的后备支援行为。
2.11 设计运行范围 operationaldesigndomain / ODD
驾驶自动化系统设计时确定的适用于其功能运行的外部环境条件。
注:典型的外部环境条件有道路、交通、天气、光照等。
2.12 设计运行条件 operational design condition / ODC
驾驶自动化系统设计时确定的适用于其功能运行的各类条件的总称,包括设计运行范围、车辆状 态、驾乘人员状态及其他必要条件。
2.13 介入请求 request to intervene
驾驶自动化系统请求动态驾驶任务后援用户执行接管的通知。
2.14 接管 takeover
动态驾驶任务后援用户响应介入请求,从驾驶自动化系统获得车辆驾驶权的行为。
2.15 驾驶自动化系统失效 drivingautomationsystem failure
驾驶自动化系统发生故障导致其无法可靠地执行部分或全部动态驾驶任务。
示例:传感器故障等。
2.16 车辆其他系统失效 other vehicle system failure
- 驾驶自动化系统之外的车辆其他系统发生故障导致驾驶自动化系统无法可靠地执行部分或全部动 态驾驶任务。
示例:制动钳失效等。
2.17 用户 user
- 与驾驶自动化相关的人类角色的统称。
注:用户的角色可以在特定的条件下进行转换。
2.17.1 驾驶员 driver
对于某个具体的车辆,实时执行部分或全部动态驾驶任务和/或接管的用户。
2.17.1.1 传统驾驶员 conventional driver
- 坐在驾驶座位上,以人工方式直接操作车辆制动、加速、转向和换挡等操纵装置对车辆进行控制的 驾驶员。
2.17.1.2 远程驾驶员 remote driver
- 不在可以手动直接操作车辆制动、加速、转向和换挡等操纵装置的驾驶座位上,仍可以实时操纵车 辆的驾驶员。
注:远程驾驶员可以是车内的用户、车辆在其视野范围内的用户或车辆在其视野范围外的用户。
2.17.2 乘客 passenger
- 在车内,但不承担任何动态驾驶任务和接管的用户。
2.17.3 动态驾驶任务后援用户 DDT fallback-readyuser
- 当 3 级驾驶自动化系统工作时,可以识别驾驶自动化系统发出的介入请求和明显的动态驾驶任务 相关的车辆故障,并执行接管的用户。
注 1 :该术语适用于 3 级驾驶自动化功能,4 级和 5 级没有这个角色。 动态驾驶任务后援用户可以在车内或车外。
注 2:动态驾驶任务后援用户在执行部分或全部动态驾驶任务时成为驾驶员。
2.17.4 调度员 dispatcher
- 在车辆无驾驶员操作的条件下,通过激活驾驶自动化系统以实现车辆调度服务但不执行动态驾驶 任务的用户。
注:具备 4 级和 5 级驾驶自动化功能,且其设计运行范围覆盖整个行程的车辆才可被调度。 如果驾驶 自动化系统 未规划线路,调度员还需要指定 目 的地。
3 驾驶自动化分级
3.1 驾驶自动化分级原则
- 基于驾驶自动化系统能够执行动态驾驶任务的程度,根据在执行动态驾驶任务中的角色分配以及有无设计运行范围限制,将驾驶自动化分成 0 级至 5 级 。驾驶自动化等级与划分要素的关系见附录 A 。 用户与驾驶自动化系统的角色见附录 B 。
3.2 驾驶自动化等级划分要素
- 基于以下 6 个要素对驾驶自动化等级进行划分:
--- 驾驶自动化系统是否持续执行动态驾驶任务中的 目标和事件探测与响应;
--- 驾驶自动化系统是否持续执行动态驾驶任务中的车辆横向或纵向运动控制;
--- 驾驶自动化系统是否同时持续执行动态驾驶任务中的车辆横向和纵向运动控制;
--- 驾驶自动化系统是否持续执行全部动态驾驶任务;
--- 驾驶自动化系统是否自动执行最小风险策略;
--- 驾驶自动化系统是否存在设计运行范围限制。
3.3 驾驶自动化等级划分
3.3.1 0 级驾驶自动化
- 0 级驾驶自动化(应急辅助,emergency assistance)系统不能持续执行动态驾驶任务中的车辆横向
或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。
注 1 : 0 级驾驶自动化不是无驾驶自动化,0 级驾驶自动化系统可感知环境,并提供提示信息或短暂介入车辆控制 以辅助驾驶员避险(如车道偏离预警、前向碰撞预警、自动紧急制动、车道偏离抑制等紧急情况下提供的辅助 功能)。
注 2:不具备目标和事件探测与响应能力的功能(如定速巡航、电子稳定性控制等)不在驾驶自动化功能的范围内。
3.3.2 1 级驾驶自动化
- 1 级驾驶自动化(部分驾驶辅助,partial driver assistance)系统在其设计运行条件下持续地执行动
态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的车辆横向或纵向运动控制相适应的部分 目标和事件探测与响应的能力。
注:对于 1 级驾驶自动化,驾驶员和驾驶自动化系统共同执行全部动态驾驶任务,并监管驾驶自动化系统的行为和 执行适当的响应或操作(如车道居中控制、自适应巡航控制等功能)。
3.3.3 2 级驾驶自动化
- 2 级驾驶自动化(组合驾驶辅助,combined driver assistance)系统在其设计运行条件下持续地执行
动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的车辆横向和纵向运动控制相适应的部 分目标和事件探测与响应的能力。
注:对于 2 级驾驶自动化,驾驶员和驾驶自动化系统共同执行全部动态驾驶任务,并监管驾驶自动化系统的行为和 执行适当的响应或操作。
3.3.4 3 级驾驶自动化
- 3 级驾驶自动化(有条件自动驾驶,conditionally automated driving)系统在其设计运行条件下持续
地执行全部动态驾驶任务。
注:对于 3 级驾驶自动化,动态驾驶任务后援用户以适当的方式执行接管。
3.3.5 4 级驾驶自动化
- 4 级驾驶自动化(高度自动驾驶,highly automated driving)系统在其设计运行条件下持续地执行全
部动态驾驶任务并自动执行最小风险策略。
注 1 :对于 4 级驾驶自动化,系统发出介入请求时,用户可不作响应,系统具备自动达到最小风险状态的能力。
注 2:某些具备 4 级驾驶自动化系统的车辆无人工驾驶功能,如园区接驳车等。
3.3.6 5 级驾驶自动化
- 5 级驾驶自动化(完全自动驾驶,fully automated driving)系统在任何可行驶条件下持续地执行全
部动态驾驶任务并自动执行最小风险策略。
注 1 :对于 5 级驾驶自动化,系统发出介入请求时,用户可不作响应,系统具备自动达到最小风险状态的能力。
注 2 : 5 级驾驶自动化在车辆可行驶环境下没有设计运行范围的限制(商业和法规因素等限制除外)。
3.4 驾驶自动化各等级技术要求
3.4.1 0 级驾驶自动化
- 0 级驾驶自动化系统应满足以下要求:
a) 具备持续执行部分目标和事件探测与响应的能力;
b) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权。
注 :当车道偏离抑制系统工作时,驾驶员可以主动控制方向盘使车道偏离抑制系统退出。
3.4.2 1 级驾驶自动化
- 1 级驾驶自动化系统应满足以下要求:
a) 持续地执行动态驾驶任务中的车辆横向或纵向运动控制;
b) 具备与车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力;
c) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权。
3.4.3 2 级驾驶自动化
- 2 级驾驶自动化系统应满足以下要求:
a) 持续地执行动态驾驶任务中的车辆横向和纵向运动控制;
b) 具备与车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力;
c) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权。
3.4.4 3 级驾驶自动化
- 3 级驾驶自动化系统应满足以下要求:
a) 仅允许在其设计运行条件下激活;
b) 激活后在其设计运行条件下执行全部动态驾驶任务;
c) 识别是否即将不满足设计运行范围,并在即将不满足设计运行范围时,及时向动态驾驶任务后 援用户发出介入请求;
d) 识别驾驶自动化系统失效,并在发生驾驶自动化系统失效时,及时向动态驾驶任务后援用户发 出介入请求;
e) 识别动态驾驶任务后援用户的接管能力,并在其接管能力即将不满足要求时,发出介入请求;
f) 在发出介入请求后,继续执行动态驾驶任务一定的时间供动态驾驶任务后援用户执行接管 操作;
g) 在发出介入请求后,如果动态驾驶任务后援用户未响应,适时采取减缓车辆风险的措施;
h) 当用户请求驾驶自动化系统退出时,立即解除系统控制权。
3.4.5 4 级驾驶自动化
- 4 级驾驶自动化系统应满足以下要求:
a) 仅允许在其设计运行条件下激活。
b) 激活后在其设计运行条件下执行全部动态驾驶任务。
c) 识别是否即将不满足其设计运行范围。
d) 识别驾驶自动化系统失效和车辆其他系统失效。
e) 识别驾乘人员状态是否符合其设计运行条件(如有)。
f) 在发生下列情况之一且用户未响应介入请求时,自动执行最小风险策略:
------即将不满足其设计运行范围;
------驾驶自动化系统失效或车辆其他系统失效;
------驾乘人员状态不符合其设计运行条件;
------用户要求实现最小风险状态。
g) 除下列情形以外,不得解除系统控制权:
------已达到最小风险状态;
------驾驶员在执行动态驾驶任务。
h) 当用户请求驾驶自动化系统退出时,解除系统控制权,如果存在安全风险可暂缓解除。
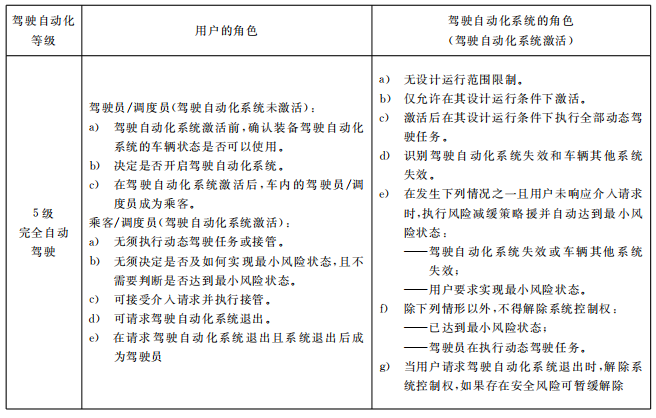
3.4.6 5 级驾驶自动化
- 5 级驾驶自动化系统应满足以下要求:
a ) 无设计运行范围限制。
b) 仅允许在其设计运行条件下激活。
c) 激活后在其设计运行条件下执行全部动态驾驶任务。
d) 识别驾驶自动化系统失效和车辆其他系统失效。
e) 在发生下列情形之一且用户未响应介入请求时,自动执行最小风险策略:
------驾驶自动化系统失效或车辆其他系统失效;
------用户要求实现最小风险状态。
f) 除下列情形以外,不得解除系统控制权:
------已达到最小风险状态;
------驾驶员在执行动态驾驶任务。
g) 当用户请求驾驶自动化系统退出时,解除系统控制权,如果存在安全风险可暂缓解除。
附录 A (资料性附录)驾驶自动化等级与划分要素的关系
表 A. 1 给出了驾驶自动化等级与划分要素的关系
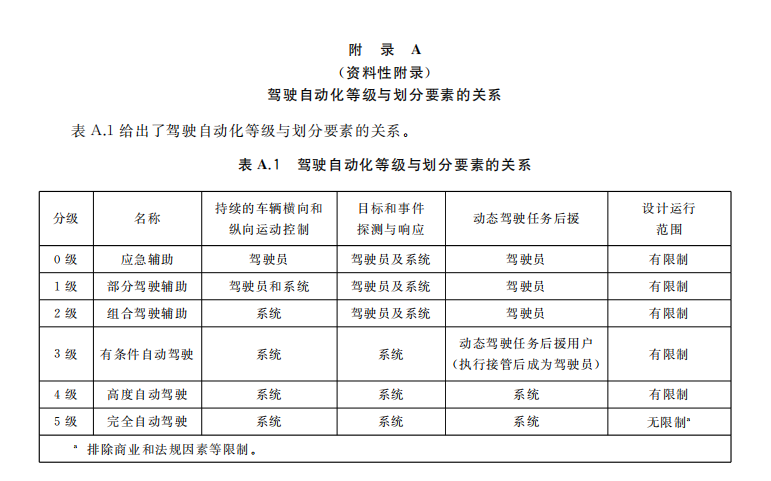
- 表 A.1 驾驶自动化等级与划分要素的关系
| 分级 | 名称 | 持续的车辆横向和 纵向运动控制 | 目标和事件探测与响应 | 动态驾驶任务后援 | 设计运行范围 |
|---|---|---|---|---|---|
| 0 级 | 应急辅助 | 驾驶员 | 驾驶员及系统 | 驾驶员 | 有限制 |
| 1 级 | 部分驾驶辅助 | 驾驶员和系统 | 驾驶员及系统 | 驾驶员 | 有限制 |
| 2 级 | 组合驾驶辅助 | 系统 | 驾驶员及系统 | 驾驶员 | 有限制 |
| 3 级 | 有条件自动驾驶 | 系统 | 系统 | 动态驾驶任务后援用户(执行接管后成为驾驶员) | 有限制 |
| 4 级 | 高度 自动驾驶 | 系统 | 系统 | 系统 | 有限制 |
| 5 级 | 完全自动驾驶 | 系统 | 系统 | 系统 | 无限制a |
| a 排除商业和法规因素等限制。 |
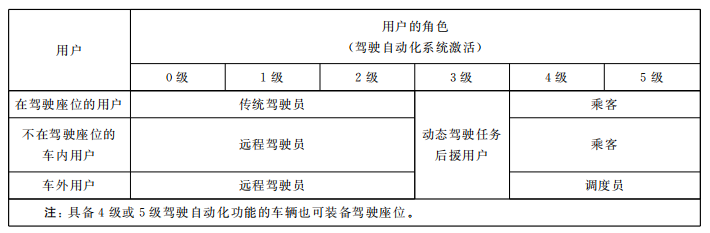
附录 B (资料性附录) 用户与驾驶自动化系统的角色
表B.1 给出了不同等级的驾驶自动化系统激活后用户担任的角色。
- 表B.1 驾驶自动化系统激活后用户的角色
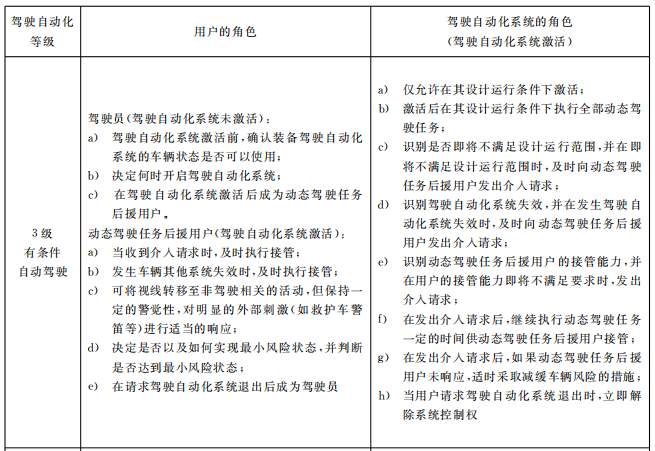
表B.2 给出了在不同的驾驶自动化等级中,用户和驾驶自动化系统在执行动态驾驶任务和动态驾 驶任务后援中的角色。
- 表B.2 用户与驾驶自动化系统的角色


Z 关键组织
- 工业和信息化部
- 全国汽车标准化技术委员
Y 推荐文献
- GB/T 40429-2021《汽车驾驶自动化分级》 正式发布 - 全国汽车标准化技术委员会 2021.9.17
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles / J3016_202104 - SAE
- SAE J3016:驾驶自动化分级(2021年4月,中文版) - 面包板 2021.5.27
2021年5月3日,SAE International与国际标准化组织(ISO)共同宣布了对J3016_201806的更新,更新后的版本为J3016_202104。