引言
目前,我国汽车技术正朝着电动化、智能化、网联化、共享化的"四化"方向发展,这给汽车工业的发展带来了巨大的挑战和机遇。智能网联汽车不仅可提供更安全、更舒适、更节能、更环保的驾驶方式,还会带来汽车产品和技术的升级,从而重塑汽车及相关产业全业态和价值链体系。
本文首先对智能网联汽车技术进行综述性介绍,然后分别介绍视觉传感器在智能网联汽车中的应用、雷达在智能网联汽车中的应用、高精度定位与号航系统、智能网联汽车路径规划与决策控制、汽车总线及车载网络技术、智能网联汽车通信技术、高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)与智能网联汽车的应用,最后简要介绍智能网联汽车的操作系统与应用平台。

什么是智能网联汽车?
1. 智能网联汽车(ICV)的定义
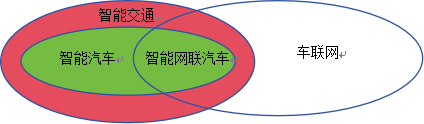
智能网联汽车即车联网与智能驾驶汽车技术相结合的产物。
2. 智能网联汽车的组成
智能交通+智能汽车+车联网=智能网联汽车
3. 智能网联汽车的关键技术
****环境感知层:****依靠(如视觉、雷达、高精导航、车内网、4G/5G无线通讯技术)实现车内外
动静信息的提取和收集,并向智能决策层传递信息。
****智能决策层:****可以通过识别到的信息(如道路、行人、交通标志、交通信号)去理解驾驶环境,分析判断所需采取的驾驶模式和决策操作,并向执行层传输指令。是智能网联车各项功能实现的核心。
****控制执行层:****根据决策层的指令执行操作和控制车辆,主要依赖车辆底盘(转向、制动、驱动等)线控和车身电子器件(车门,车灯,仪表等)实现车辆自动控制。
4. 自动驾驶等级划分
表1 美国汽车工程师学会的自动驾驶等级划分
|----|---------|
| 等级 | 描述 |
| L0 | 无自动驾驶 |
| L1 | 辅助驾驶 |
| L2 | 部分自动驾驶 |
| L3 | 有条件自动驾驶 |
| L4 | 高度自动驾驶 |
| L5 | 完全自动驾驶 |
表2 我国汽车智能化分级
|----|---------|
| 等级 | 描述 |
| DA | 驾驶辅助 |
| PA | 部分自动驾驶 |
| CA | 有条件自动驾驶 |
| HA | 高度自动驾驶 |
| FA | 完全自动驾驶 |
| DA | 驾驶辅助 |
表3 网联化分级
|----|-----------|
| 等级 | 描述 |
| 1 | 网联辅助信息交互 |
| 2 | 网联协同感知 |
| 3 | 网联协同决策与控制 |

视觉传感器在智能网联汽车中的运用
视觉传感器的原理与作用:
CCD表面涂层捕获光子产生光生电子,聚集在CCD下的绝缘图层,由控制电路串行输出到模拟电路再通过成像电路(如DSP)进行传输形成图像。通过各类图像处理算法从图像中提取并跟踪相关特征,实现车辆周围路况识别,为决策系统提供有效的环境感知信息。
- 单目视觉传感器
- ****原理:****先识别后测距,通过建立数据库由算法学习图片特征,在实际应用中用特征识别目标。
- ****优点:****成本低,帧速率高,信息丰富,检测距离远。
- ****缺点:****易受光照,气候等环境影响,缺乏目标距离等深度信息,对目标速度的测量也有一定影响。
- ****特点:****视角越宽,精确检测距离越近;视角越窄,精确检测距离越远;可结合其他种类传感器取长补短。
|---|----------------------------------------------------------------------------|
| |
| |  |
|
图1 单目视觉传感器(图源网络)
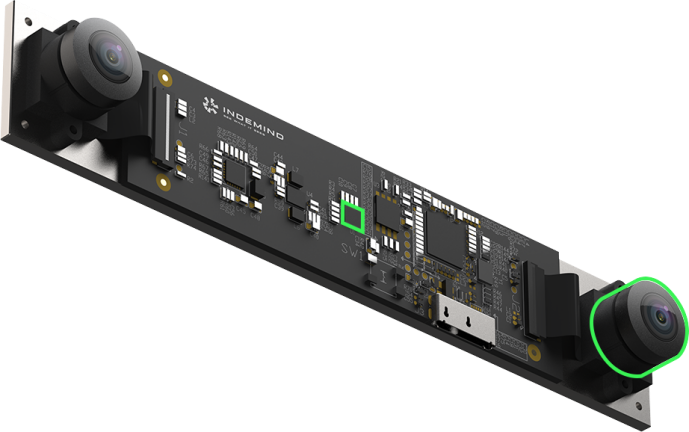
2. 双目视觉传感器
- **原理:**模拟人眼,分别闭上左右眼产生的位移,通过位移大小测量目标物体的距离;识别物体的方式与单目一致。
- **优点:**精度高,距离测量精准,环境感知强
- **缺点:**安装难度高,调试难度高,测量距离短。
- **特点:**通过视觉计算原理可实现三维空间位置感知,比单目更精准。
|---|----------------------------------------------------------------------------|
| |
| |  |
|
图2 双目视觉传感器(图源网络)
3. 红外夜视传感器
- ****原理:****与视觉传感器一致,通过强弱不等的辐射信号转换成电信号,经放大等一系列处理,形成人可观察的视频图像。
- ****特点:****有主动和被动两种技术路线
主动:向外发射红外线,再由物镜接收,在红外热成像管的光电阴极表面形成红外图像。
被动:接收物体自身反射的红外线,在红外热成像管的光电阴极表面形成红外图像。
- ****作用:****可作为光照不足条件下对视觉传感器的补充

图3 红外夜视视觉传感器(图源网络)
4. 多个视觉传感器组合
例:3个单目传感器组成3个视场,分别为25°视场,50°视场,150°视场
其中25°视场最远,150°最近。三段可有效覆盖道路,行人,交通灯信息。
5. 视觉传感器在智能网联汽车中的实际应用
- 车道偏离警告
- 车道保持辅助系统
- 汽车防碰撞系统
- 交通标志识别系统
- 换道辅助系统
- 驾驶人监控系统
- 泊车辅助系统
- 红外夜视系统
- 全景环视系统
- 电子后视镜
- 智能照明系统

智能网联汽车领域图像处理方法
1. 传统识别过程
图像输入→预处理→特征提取→特征分类→匹配和完全识别
在传统的图像算法中,需要人工设计图像中的典型特征,下面举例介绍几种典型的人工图像特征:
- SIFT特征:尺度不变特征变换,在不同的尺度空间搜索特征点及其方向,获取图像中的特征目标。(检测边缘点、角点等不因光照仿射变换和噪声等影响的特征点)
- HOG特征:方向梯度直方图,特征通过计算和统计图像局部区域达到梯度方向直方图哎构成特征。(行人检测优秀)
- Haar-like特征:由边缘特征,线性特征,中心特征和对角线特征构成,这三类特征组合成特征模板。(反应图像灰度变化情况)
****优点:****直观,可分析。
****缺点:****需要对图像中的结构化信息有深入了解,并能构建可直观区分又能通过数字处理方法提取的特征,但对于计算机算法来说,以上特征是非必须的,在一定程度上影响了图像识别效率。
2. 多层神经网络训练特征识别
- ****人工神经网络:****逐层提取图像矩阵中的数学特征,层间递进地组合为全局特征,最终实现面向计算的特征提取。通过数据集训练后的神经网络,学习得到目标包含的典型特征,构成强大的特征提取器。
- ****卷积神经网络(CNN):****首先,通过对网络结构超参数的设计,确定网络的结构;然后,将样本图像提供给网络进行自学习,确定网络中各项参数;最后,就可以使用确定好各项参数的网络对实时获取的图像进行处理,从而获得已经训练后的环境/目标特征。
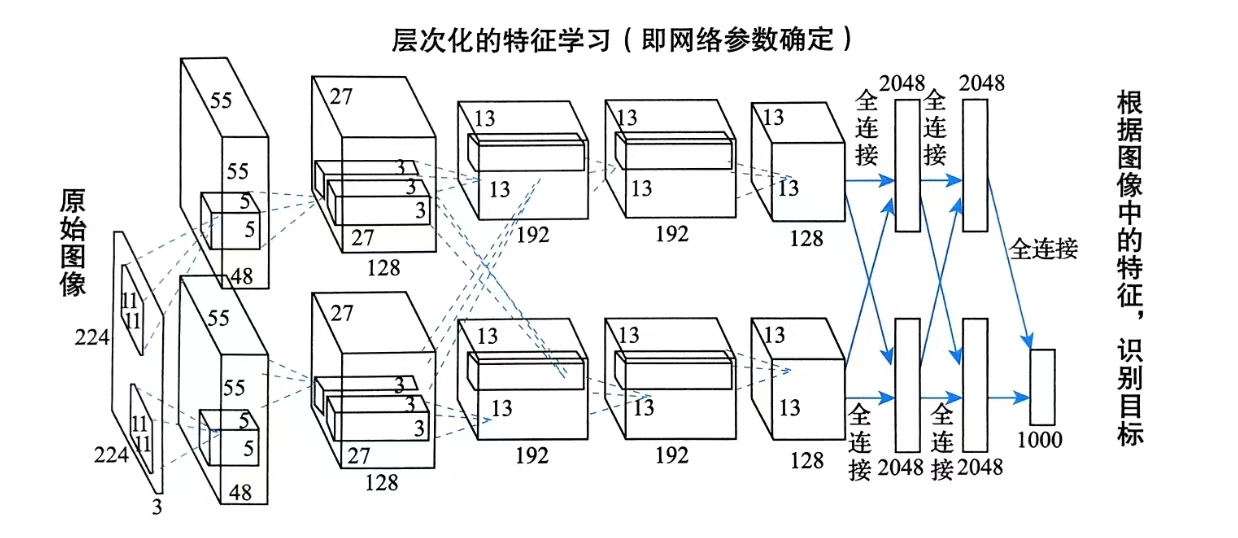
图4 卷积神经网络提取图像特征示意图(图源网络)
目前基于人工神经网络的目标检测与识别算法大致有三类:
- 基于区域建议的目标检测和识别算法;
- 基于回归的目标检测与识别算法;
- 基于搜索的目标检测与识别算法。
人工神经网络可以模拟人类思维,实现自我学习,消除了图像处理过程中人工特征设计、提取、预处理等步骤,简化了图像输入输出的步骤,使得视觉系统能快速理解环境。
3. 图像识别算法在智能网联汽车的典型应用
- 车道检测
- 语义分割
- 立体视觉与场景流
- 视觉里程计算法
- 目标跟踪

雷达在智能网联汽车中的应用
1. 超声波雷达(f>20kHz)
-
****原理:****利用超声波发生器产生超声波,然后接收探头接收障碍物反射的超声波,并根据超声波反射接收的时差,计算出与障碍物的距离。计算公式s=(t×340)/2
-
****结构:****压电超声发生器,超声波传感器
常用的频率有:40kHz,48kHz,58kHz。频率越高灵敏度越高,但水平与垂直方向探测角度越小。目前广泛使用40kHz的超声波探头。
- 主要指标:
- ****工作频率:****频率越高灵敏度越高,但水平与垂直方向探测角度越小。目前广泛使用40kHz的超声波探头。
- ****工作温度:****取决于应用的条件,小功率雷达工作温度相对较低,能长期工作而不故障。有些则会产生大量的热,需进行主动冷却
- ****灵敏度:****超声波雷达工作过程中需要反复将机械能转变为电能,或将电能转变为机械能。其中能力转变的程度用机电耦合系数表示,系数越大,灵敏度越高。灵敏度与晶片的制造有关。
实际应用中还需考虑多普勒效应,温度影响,噪声干扰,线性驱动干扰,机械特性等。在有效探测范围内,误差在±5cm。
- ****种类:****超声波传感器主要分为UPA和APA两大类,UPA为短程超声波传感器,APA是原创超声波传感器,UPA一般置于车身前后,APA置于车身侧面。

图5 UPA超声波传感器(图源网络)

图6 APA超声波传感器(图源网络)
- ****超声波雷达在智能网联汽车中的应用:****倒车辅助系统;自动泊车系统。
2. 毫米波雷达
- ****结构:****天线,收发芯片,信号处理芯片等
- ****原理:****通过发射和接收毫米波段的电磁波来测量车辆与车辆之间的距离,角度和相对速度。
- ****特点:****具有全天候工作能力,智能网联汽车领域主要用来目标识别和跟踪。毫米波波长短,分辨率高,穿透力强,但传播损耗大,传输距离短。
毫米波雷达天线以高频印刷电路板的方式设计,集成在基板上,技术要求高。
雷达收发芯片一般用硅锗(SiGe)双极晶体管,互补金属氧化物半导体(CMOS)等。

图7 毫米波雷达(图源网络)
早期硅锗晶体管77GHz占用大量集成电路的空间,且成本较高。
CMOS成本较低,可在低压下工作,且功耗较低。
车载运用一般为调频连续波(FMCW)雷达。既可以测距,也可以测速。在近距离测量方面有很大优势。
毫米波雷达主要测量目标的距离,速度和方位角
毫米波雷达可分为长距离雷达(LRR)、中距离雷达(MRR)、短距离雷达(SRR)。
实际应用中,LRR和MRR一般置于车前方,SRR一般置于车辆四角
智能网联汽车领域中,中短距离以24GHz频段为主,长距离以77GHz为主。
77GHz被认为是未来主流,其优点为:
- 探测距离远,77GHz毫米波带宽大,天线小,功率集中。
- 独特频段,24GHz与射电天文信号为同频段,有干扰。而77GHz则是汽车领域专属频段。
- 尺寸小,容易实现小型化。
毫米波雷达在智能网联汽车的应用
- 自适应巡航系统(ACC)
- 自动紧急制动系统(AEB)
- 换道辅助系统,包括盲点检测(BSD),换道辅助(LCA),后碰撞预警(RCW)
3. 激光雷达
-
****原理:****通过发射激光光束来扫描环境,并接收反射回来的光束获取检测数据,利用飞行时间测量获取激光发射器到物体的距离。即在t1时刻发射一道激光,在t2时刻接收到漫反射的光线,即可通过(t2-t1)×c/2得到距离。通过机械,电子等处理式控制激光光束,实现多条光束对环境的扫描,产生的数据经处理可获得环境中物体的点云,实现对环境精确三维测量。
-
****优势:****通过激光雷达获得的点云可以准确获取空间环境信息,精度可达厘米级。
-
特点:
- 高分辨率,可实现极高的角度,范围和速度分辨率
- 隐蔽性好,抗干扰能力强
- 低空探测性好,但由于地面回波,有盲区
- 体积小,重量轻
- ****缺点:****受气候天气影响大,在大雨,浓烟,浓雾工况激光损失急剧加大。
- 分类:
- 按发射波形:连续型,脉冲型。
- 按探测方式:直接探测,相干探测
- 按光束控制:机械式,固态式
- 按工作介质:半导体激光雷达,固体激光雷达,气体激光雷达
- 按照线数:单线激光雷达,多线激光雷达
- 按照载荷平台的不同:车载激光雷达,机载激光雷达,星载激光雷达
车载领域主要分为 多线旋转式雷达和固态激光雷达两大类
(1)多线旋转式激光雷达
- ****结构:****由激光发射器,光学接收器,伺服电动机,光学旋转编码器,倾斜镜等构成。
- ****原理:****激光发射器将电脉冲转为光脉冲发射出去,光学接收器再将从目标反射回来的光脉冲还原成电脉冲,将连续获取的360°环境信息进行处理,得到点云的信息

图8 多线旋转式激光雷达(图源网络)
激光束越多,扫描频率越快,获取轮廓就越全面,通过进一步对点云进行信息处理可以分辨出环境中的目标类型,运动形态,三维尺度等全面信息。
常见的一般分为16线,32线,64线,128线,高频激光器可以在1s内获得1×10^6~7数量级的点云信息。除了位置信息,还可以通过激光反射率来区分不同材质。(如车道线)
(2)固态激光雷达的结构和工作原理
- ****原理:****依靠电子元件控制激光光束发射角度,可以实现扫描范围的动态调整。
- ****优点:****不需要旋转部件,可以压缩雷达尺寸,提高使用寿命,降低成本。可通过软件进行调节以适配不同车辆,降低了标定难度。采集速度快,分辨率高,对温度和振动适应性强。
- ****缺点:****只能探测特定范围,要实现全方位扫描,需多个配合使用。
- 种类(按调整光束的方式分类):
- 相控阵(OPA):通过相控阵原理,调整发射阵中各发射单元的相位差来改变激光的出射角,实现探测范围的调整。也称为电子扫描技术。无机械固件,扫描快,精度高,但容易形成旁瓣,影响光线作用距离和角分辨力。

图9 OPA固态激光雷达(图源网络)
-
FLASH:大面积的激光发射和接收阵列,同时照射并接收反射光,快速生成高分辨率的三维图像。稳定性成本都很好,但探测距离近,技术可靠性存在一些问题。
-
MEMS:微电子机械系统,通过微振镜的摆动实现环境扫描。将所有机械部件都集成到微电子机械系统中,消除了大型的机械旋转结构,降低了成本。

图10 MEMS 固态激光雷达(图源网络)
(3)激光雷达在智能网联汽车中的应用
可用于车道线检测,目标分类与运动跟踪,通过环境特征匹配进行的SLAM高精度定位等感知系统。
车载激光雷达的应用首先应保证成本,其次是环境适应性和强抗干扰能力。
固态激光雷达率先在量产车中应用。
能力高度集中的光束有可能对人体造成损害,故车载激光雷达必须达到规定的安全等级,如应按FDA或IEC标准进行标注。
总结
以上便是智能网联汽车实现智能网联的第一步------感知。没有这一步接下来的一切都将寸步难行,下一期我们就来聊一聊决策和控制层。