1.摘要
本文设计了一套**"基于Labview的旋转机械信号分析与故障诊断系统(可部署AI模型和实时监测设备运行状态)"** 。首先,LabVIEW 端构建了信号采集与设备状态实时监测模块和本地数据故障诊断模块。该系统实现了"数据采集、数据处理、时频域特征分析、实时监测和本地诊断"的一体化,具有跨平台融合、智能化、可扩展和可视化直观等特点,适用于旋转机械设备的状态监测与健康管理。
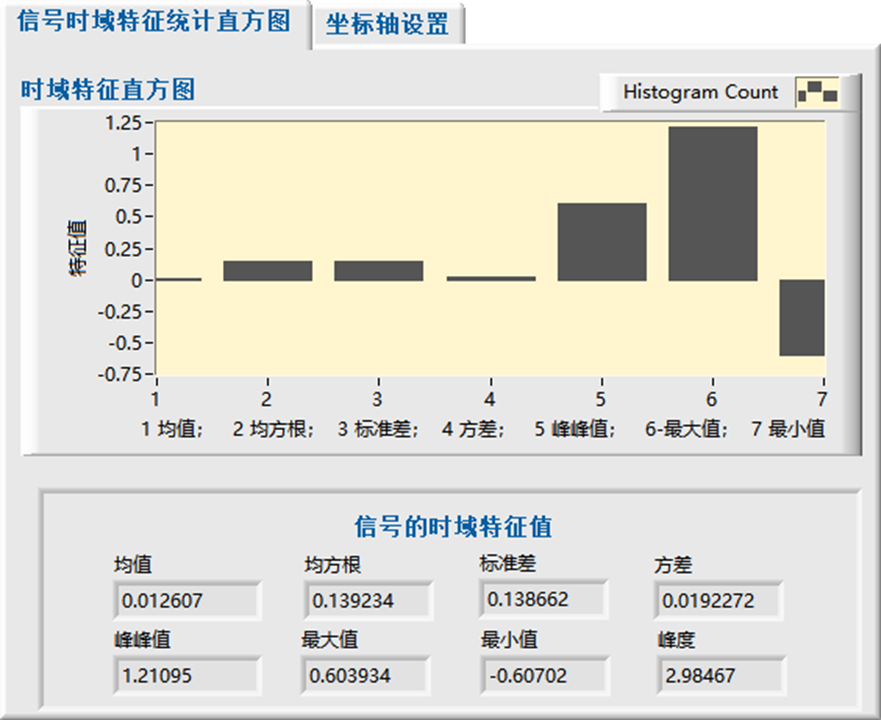
(1)对于信号采集与设备状态实时监测模块, 系统能够实时采集设备的振动\电压\电流\声音等信号,并可以加载AI模型对采集到的信号进行实时故障诊断。系统界面集成信号时域监测、快速傅里叶变换(FFT)频谱分析和功率谱密度(PSD)计算,能够全面展示信号在时域与频域的特征**。** 系统支持均值、标准差、方差、偏度、峭度等 多种时域特征自动提取**,** 并通过直方图直观显示**。** 诊断结果可实时反馈设备运行状态,提供正常/故障报警提示。(2)对于本地数据故障诊断模块 ,系统可以加载本地振动信号数据,调用训练好的AI模型进行故障识别与状态判断。同样地,该模块也具有上述的时频域分析模块。
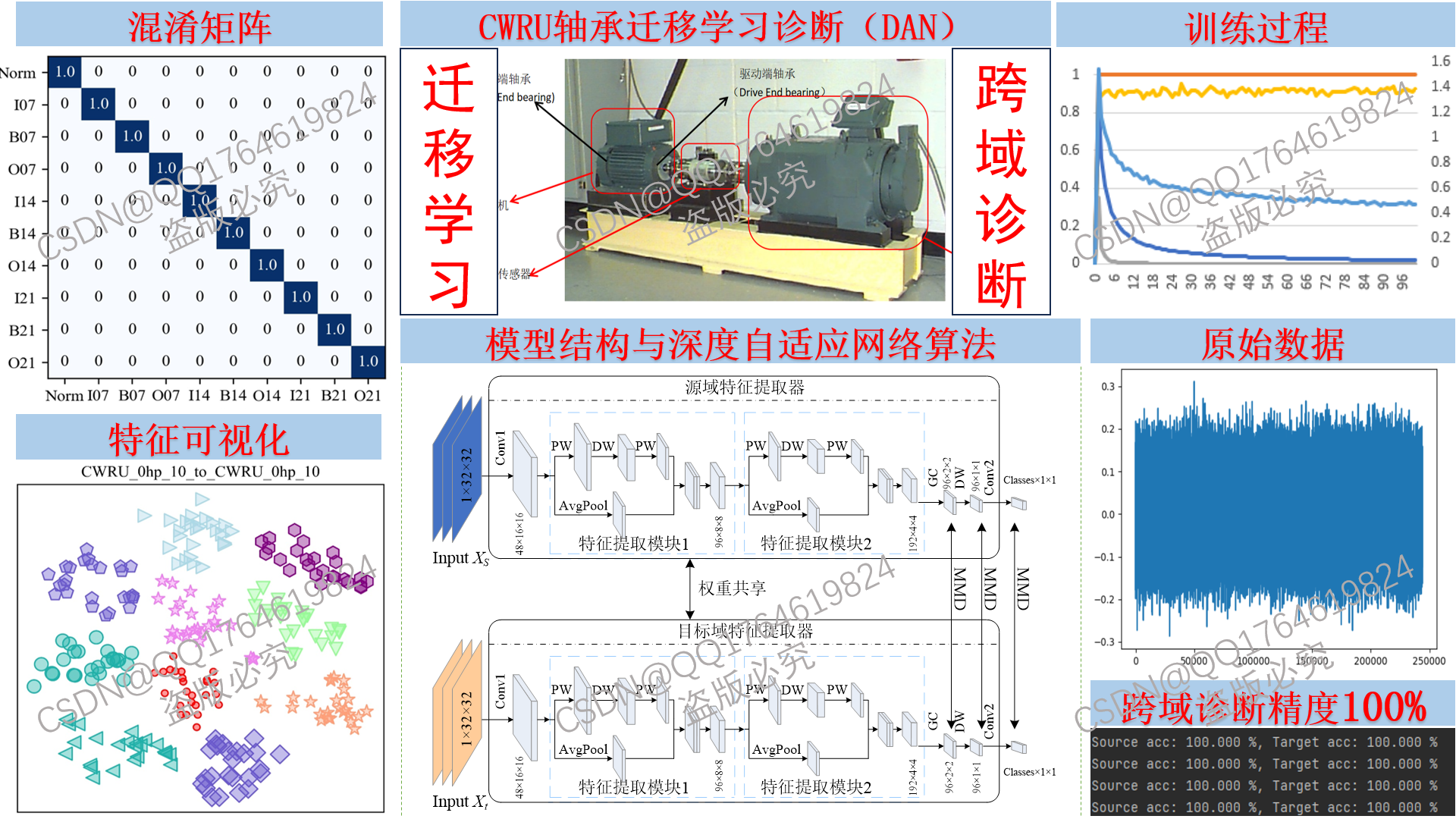
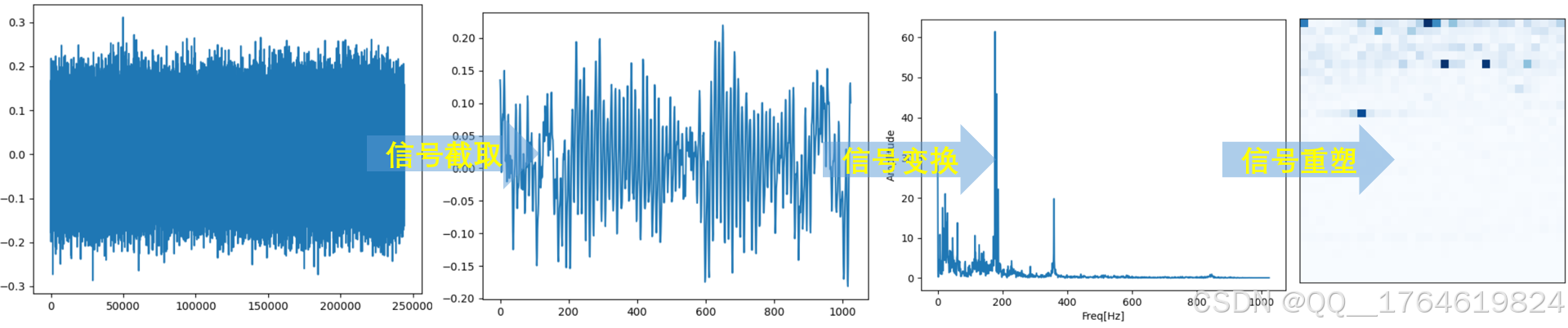
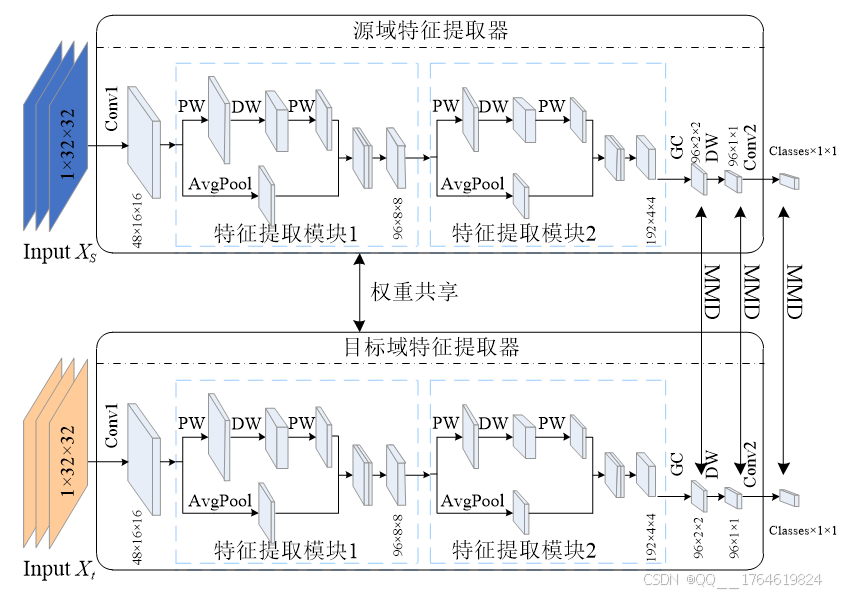
其次,描述了凯斯西储大学的电机试验台在 0--3 hp 四种负载、12 kHz 采样率下采集了正常、内圈、外圈及滚动体共 10 类故障状态的振动信号,并按 7/14/21 mils 三种损伤直径建立数据集。接着,提出"FFT+归一化+重塑 "的数据预处理流程,将 1024 点一维时域信号转换为 32 × 32 的二维频域张量,适配轻量级卷积网络。最后,模型端采用融合深度可分离卷积与反向残差结构的轻量化主干网络,并引入深度领域自适应网络(DAN)与最大均值差异(MMD)实现无监督跨工况领域自适应 ,完成跨工况迁移诊断。
2.Labview智能诊断系统界面介绍
2.1信号采集与设备状态实时监测模块
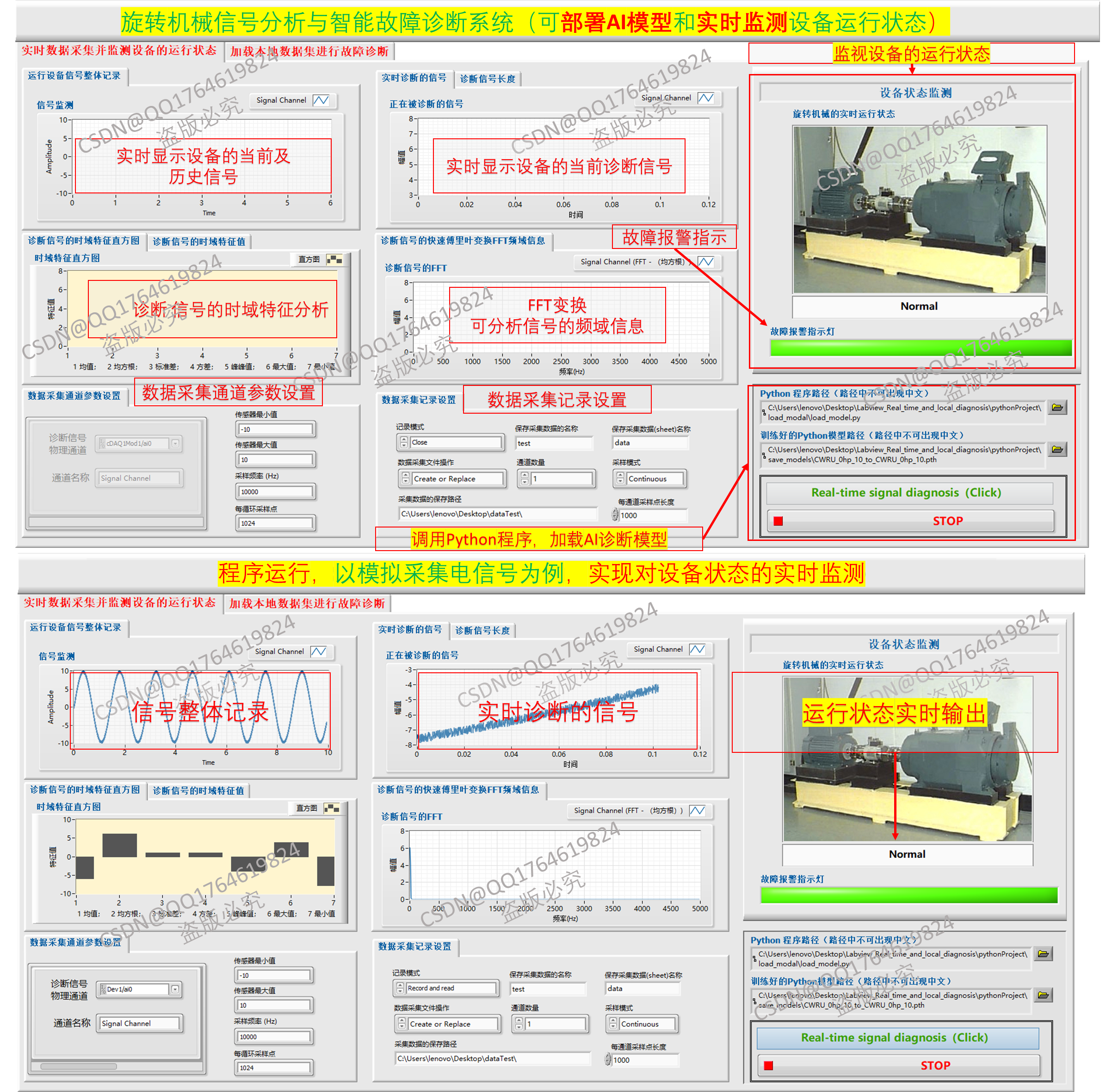
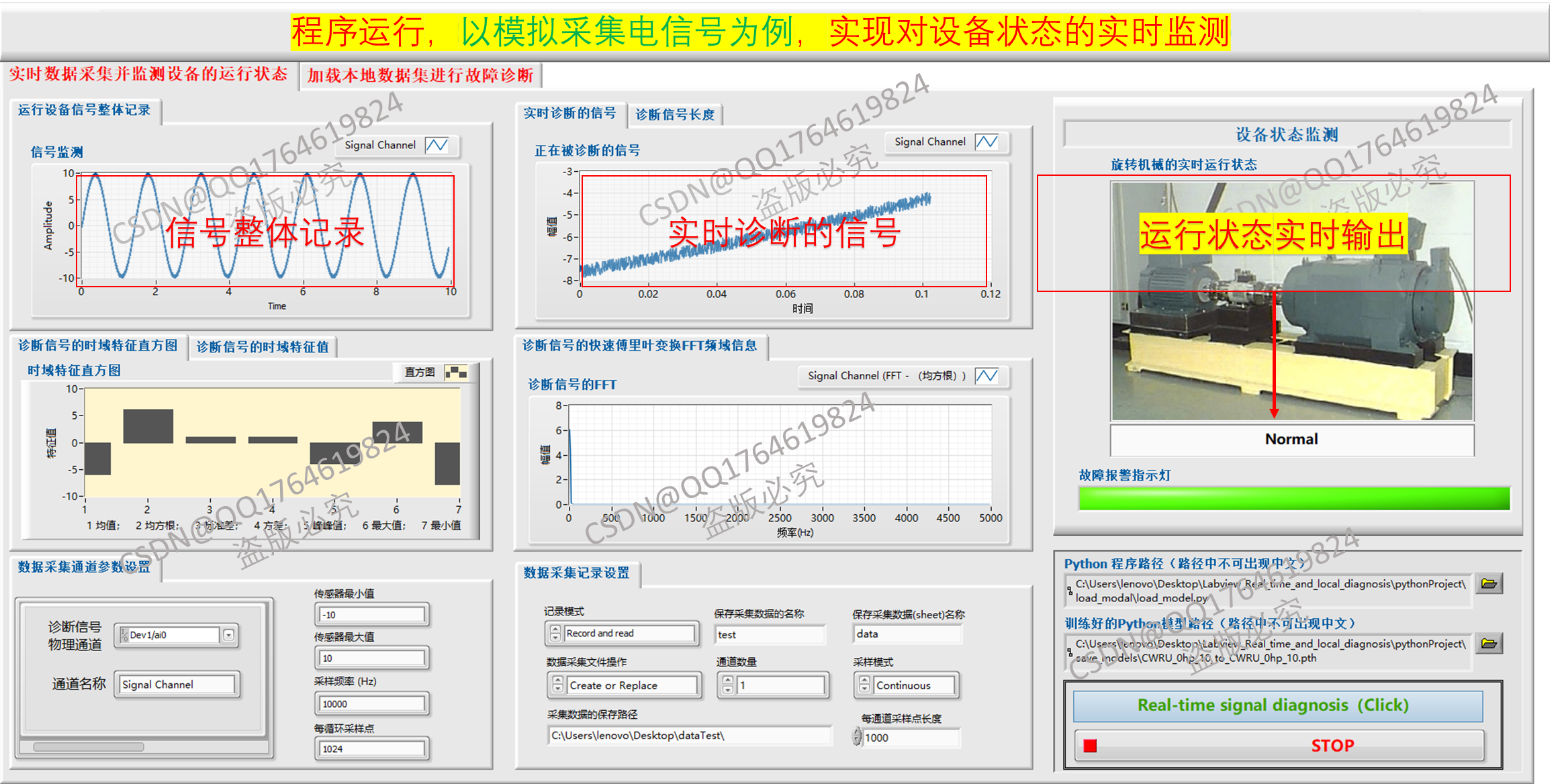
数据采集与实时故障诊断的整体界面如下图所示。该界面需要连接NI的信号采集卡并采集数据,然后将实时采集的数据输入模型,模型可以实时输出设备的运行状态。由于无法采集CWRU轴承试验台的真实信号,因此本系统模拟采集电压信号进行实时诊断。用户若采集自己的试验台信号请连接真实的NI采集卡,然后更换设备状态监测的标签和试验台图片。
2.1.1函数调用与模型加载
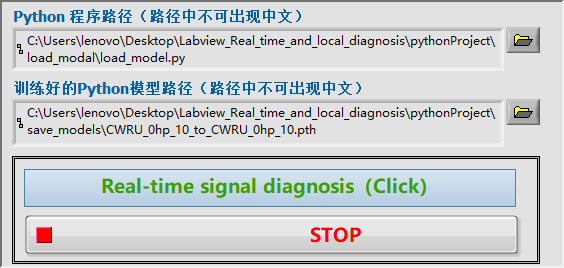
首先设置Python 程序路径,并调用Python训练好的AI模型,进而实现对采集到的信号的实时诊断。
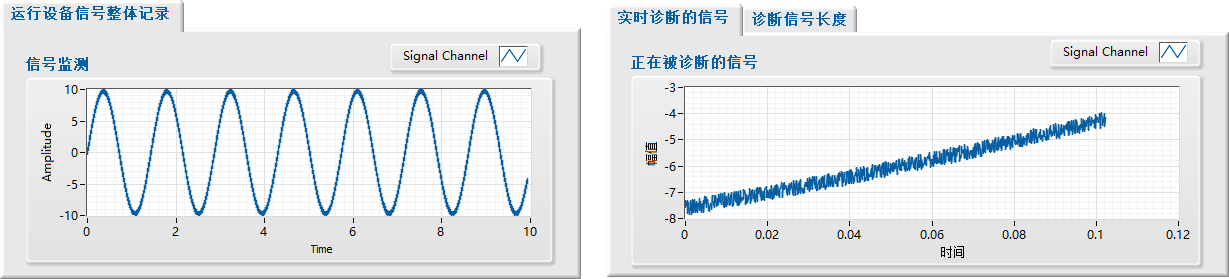
2.1.2信号实时监测
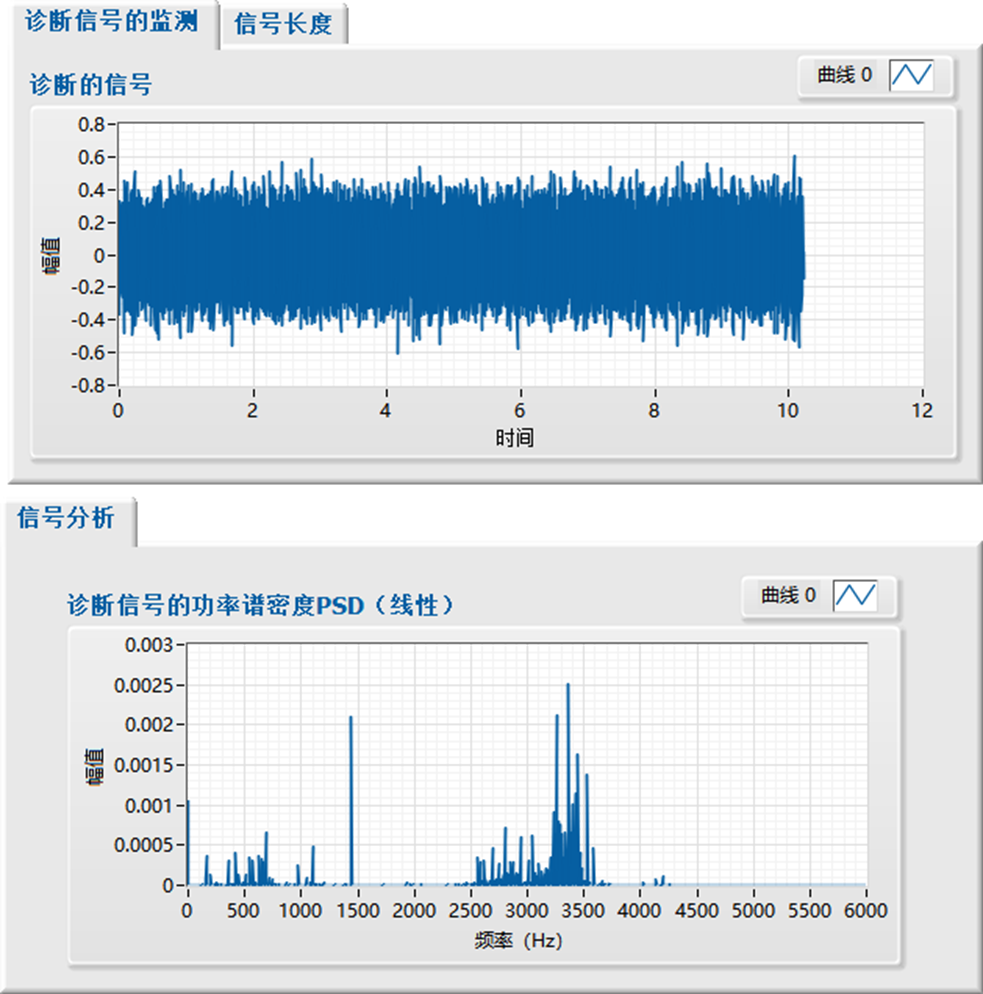
系统可以记录设备运行期间的整体信号,也可以实时显示正在被诊断的信号,如下图所示。
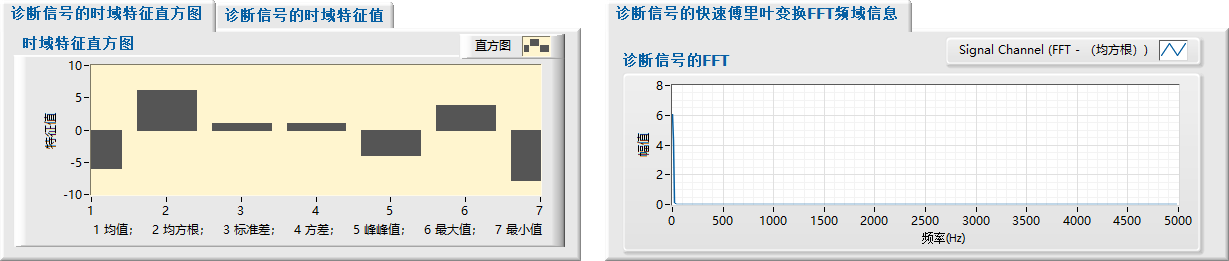
2.1.3信号的时频域特征分析
系统可以实时计算诊断信号的时域特征,并可以对诊断信号进行频域分析,如下图所示。
2.1.4 Python 集成
系统能调用Python脚本和已训练好的深度学习模型。支持模型加载与预测,结合LabVIEW界面实现人机交互。Labview调用的python脚本程序如下:
python
from models.Lightweight_model import Lightweight_model
import torch
import numpy as np
from scipy.fftpack import fft
from sklearn.preprocessing import normalize as norm
def process_data(data):
# Ensure the input is a numpy array
data = np.array(data)
# Take the first 1024 points
data = data[:1024]
fft_norm = True
if fft_norm:
# FFT normalization
data = abs(fft(data))
data = norm(data.reshape(1, -1))
else:
pass
# Reshape to (1, 1, 32, 32)
data = data.reshape(1, 1, 32, 32)
# Convert to a PyTorch tensor
tensor = torch.from_numpy(data).float()
return tensor
def predict(data, model_path):
diagnostic_data = process_data(data)
model = Lightweight_model(class_num=10) # num_classes根据数据集类别数进行修改
model.load_state_dict(torch.load(model_path, map_location='cpu')) # 加载模型参数
model.eval()
with torch.no_grad():
output, _, _, _, _ = model(diagnostic_data)
_, predicted = torch.max(output.data, 1)
return predicted2.2本地数据故障诊断模块
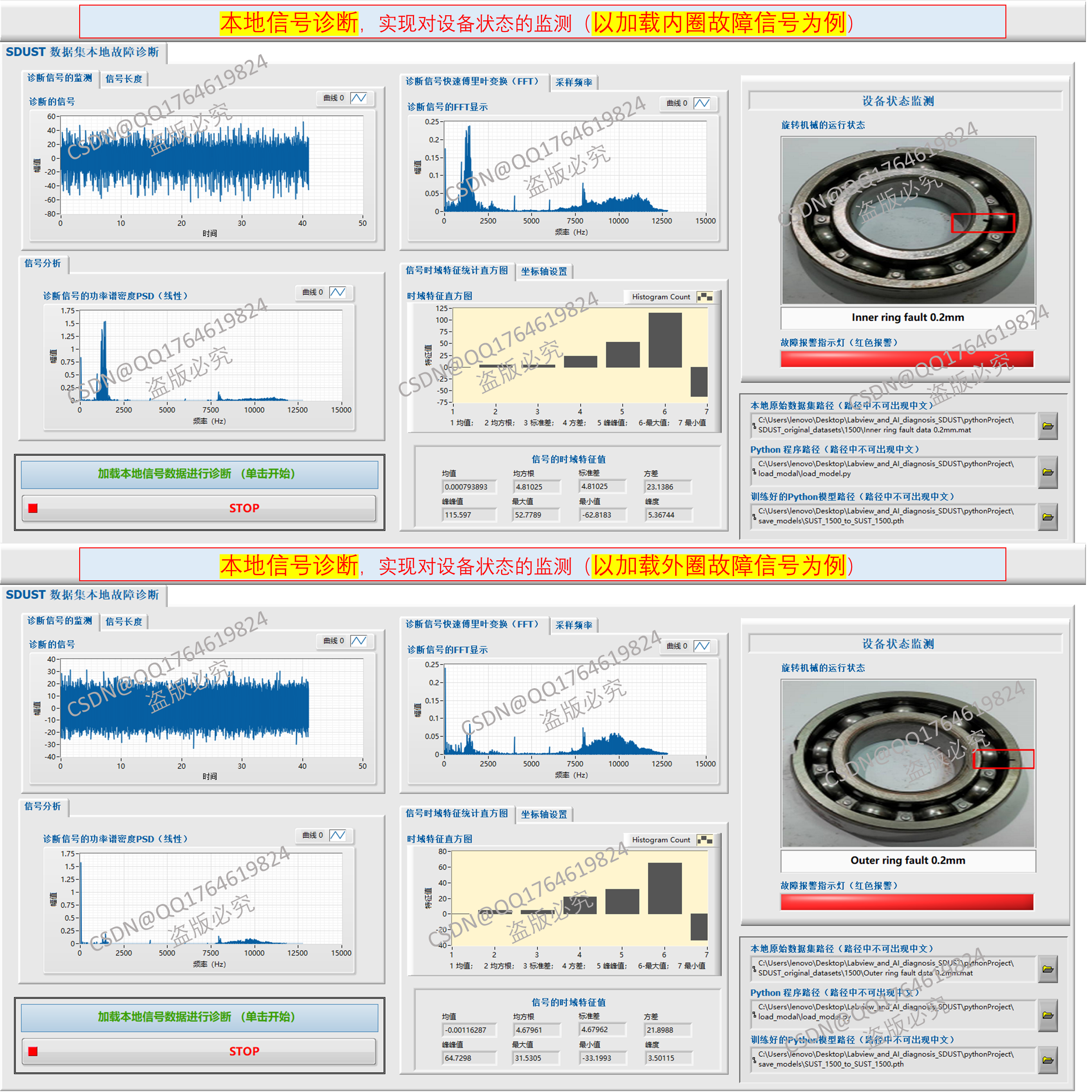
该模块主要通过加载本地数据并对数据进行故障诊断。该模块实现了数据加载、分析到智能诊断的完整流程。以加载内圈0.2mm和外圈0.2mm轴承故障信号进行诊断为例,运行结果如下图所示。
2.2.1 数据加载与诊断
- 系统支持加载本地旋转机械信号数据(例如CWRU轴承数据集)。可以调用Python训练好的AI模型,实现对新输入信号的自动故障识别。
2.2.2 信号监测与显示
可加载并显示诊断信号的时域波形。进行快速傅里叶变换(FFT),显示信号的频域特征。提供功率谱密度(PSD)分析,辅助判别故障特征频率。
2.2.3 特征提取与分析
自动计算时域统计特征(均值、标准差、偏度、峭度等)。提供直方图展示时域特征分布情况。
2.2.4 设备状态监测
系统通过AI模型的诊断结果输出设备运行状态(如Normal、Fault)。配置报警指示灯,若发现异常则红灯报警。

3. 深度自适应迁移学习网络介绍
基于Labview的智能诊断系统将调用深度自适应网络(Deep Adaptation Network,DAN)模型来完旋转机械的智能诊断。 接下来将讲解从零开始搭建深度自适应网络(Deep Adaptation Network,DAN)算法,如下图所示。项目包括加载CWRU轴承原始信号,信号处理、数据集制作,模型搭建,DAN深度领域自适应算法设计、特征可视化,混淆矩阵等流程来帮助读者学习基于迁移学习/变工况/域适应的故障诊断。学懂本项目即可了解基于迁移学习的故障诊断基本流程。本项目中\***所有程序代码包含详细的注释**\*,适合新生小白学习。本项目CWRU数据集变工况迁移诊断准确率可达100%。
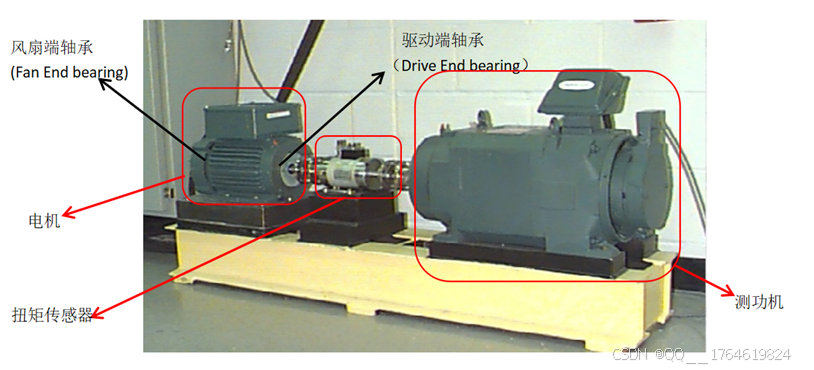
3.1试验台介绍
CWRU凯斯西储大学数据集包括四种轴承不同轴承健康状态,即正常状态、内圈故障、外圈故障和滚动体故障 。分别有7mils、14mils和21mils三种故障直径 (1mils=0.0254mm)。该电动机在0hp、1hp、2hp、3hp四种不同的负载 和1730r/min、1750r/min、1772r/min、1797r/min四种不同转速下收集振动信号。
3.2 数据预处理
数据预处理部分主要是将原始信号划分为训练集和测试集,以用于训练模型。该部分包括:
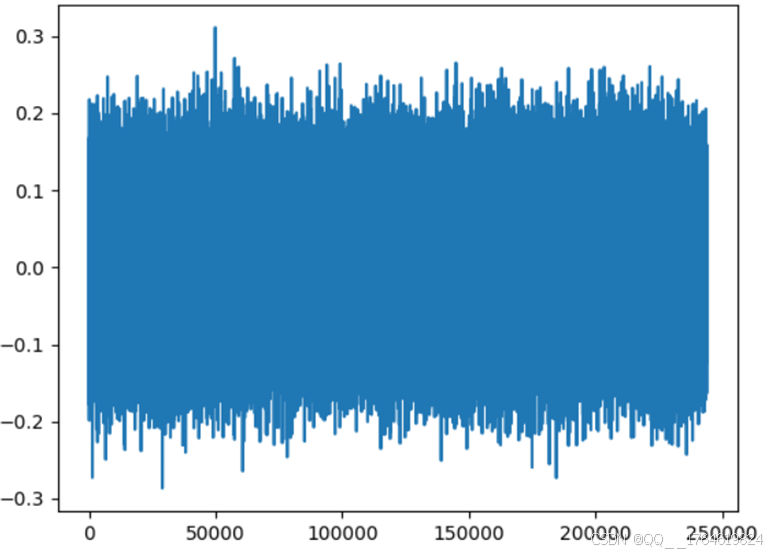
- 加载原始信号,从.mat原始数据中加载信号数据;
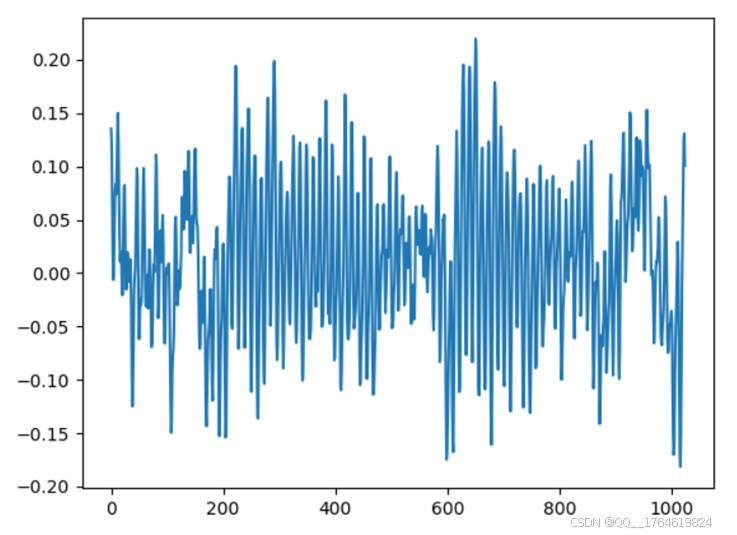
- 信号分割,即将原始信号分割为多个样本;
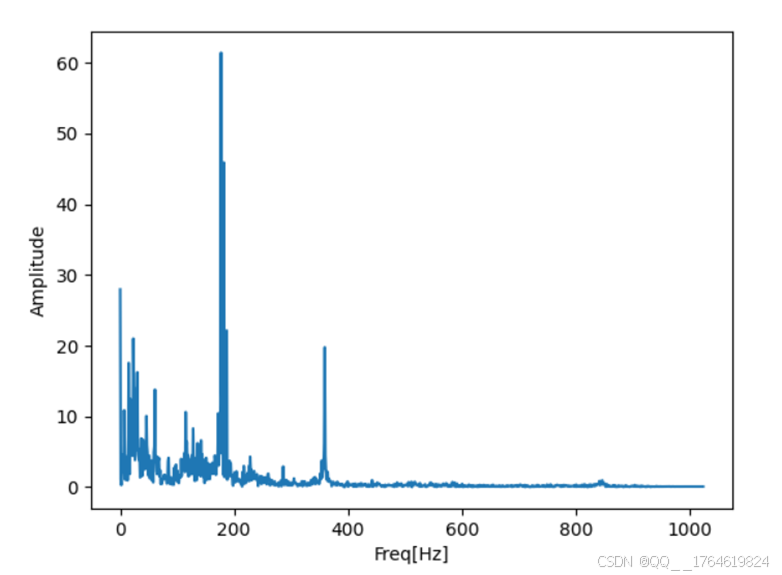
- 信号变换,将时域信号转换为频域信号;
- 信号归一化,将信号进行归一化处理;
- 信号重塑,将信号转换为batch, channel, height, weight的数据,以便于输入卷积模型;
- 数据集生成,将每个类别的样本和标签进行拼接,组成一个完成的训练集。
3.2.1加载原始信号
从mat文件中加载原始的信号,如下图所示。
3.2.2信号分割
从原始信号中随机采样n个样本长度为1024的样本,如下图所示。
3.2.3对原始信号进行FFT变换
3.2.4信号重塑
将长度为1024的一维频域信号重塑为32, 32的二维信号,如下图所示。

3.3.模型介绍
3.3.1模型结构介绍
本项目使用的轻量化模型主要由标准卷积(Conv1和Conv2)、轻量化特征提取块(Block1和Block2)和分组卷积GC组成,如下图所示。
3.3.2模型结构参数介绍
具体的模型结构如下表所示。
|---------|-------|-----|---------|------|-------|
| 结构 | 卷积核尺寸 | 步幅 | Padding | 输出通道 | 输出尺寸 |
| 信号 | -/- | -/- | -/- | 1 | 32×32 |
| Conv1 | 3×3 | 2 | 1 | 48 | 16×16 |
| PW | 1×1 | 1 | 0 | 48 | 16×16 |
| DW | 3×3 | 2 | 1 | 48 | 8×8 |
| PW | 1×1 | 1 | 0 | 48 | 8×8 |
| Avgpool | 3×3 | 2 | 1 | 48 | 8×8 |
| 特征提取模块1通道拼接 |||| 96 | 8×8 |
| PW | 1×1 | 1 | 0 | 96 | 8×8 |
| DW | 3×3 | 2 | 1 | 96 | 4×4 |
| PW | 1×1 | 1 | 0 | 96 | 4×4 |
| Avgpool | 3×3 | 2 | 1 | 96 | 4×4 |
| 特征提取模块2通道拼接 |||| 192 | 4×4 |
| GC | 3×3 | 1 | 1 | 96 | 2×2 |
| DW | 3×3 | 2 | 1 | 96 | 1×1 |
| PW | 1 | 2 | 0 | 10 | 1×1 |
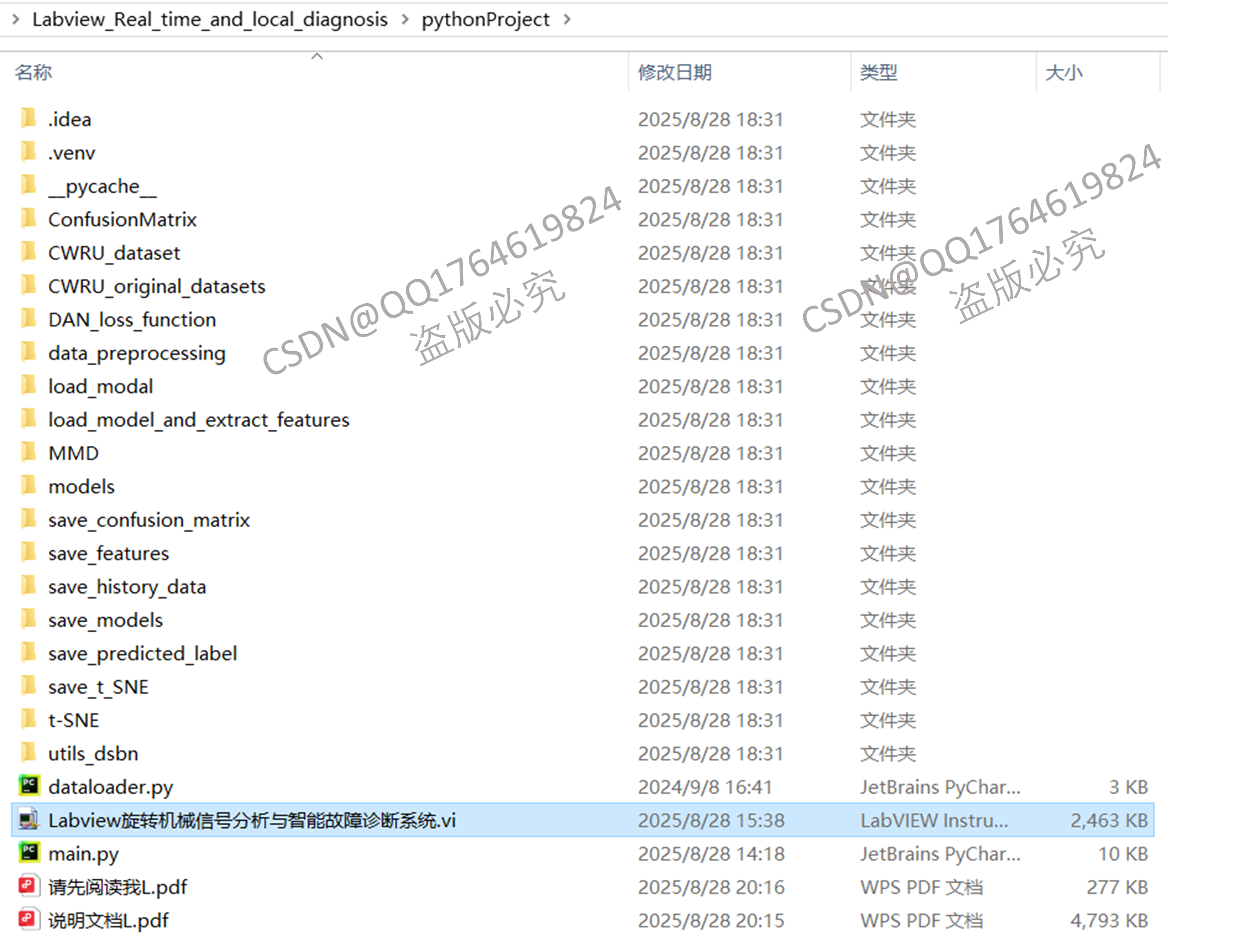
4.项目程序文件
5.说明文档
详细的说明文档如下,详细讲解了基于Labview的旋转机械AI智能诊断系统项目。