一、小剧场
 准备阶段:
准备阶段:
- ESP8266 开发板(带 Wi-Fi 功能)、SG90 舵机、杜邦线若干、电源(5V 锂电池,可配合 Arduino/STM 使用)、Linux 公网服务器
- Arduino IDE(代码编写与上传)
- 友善串口调试工具
终极目标:
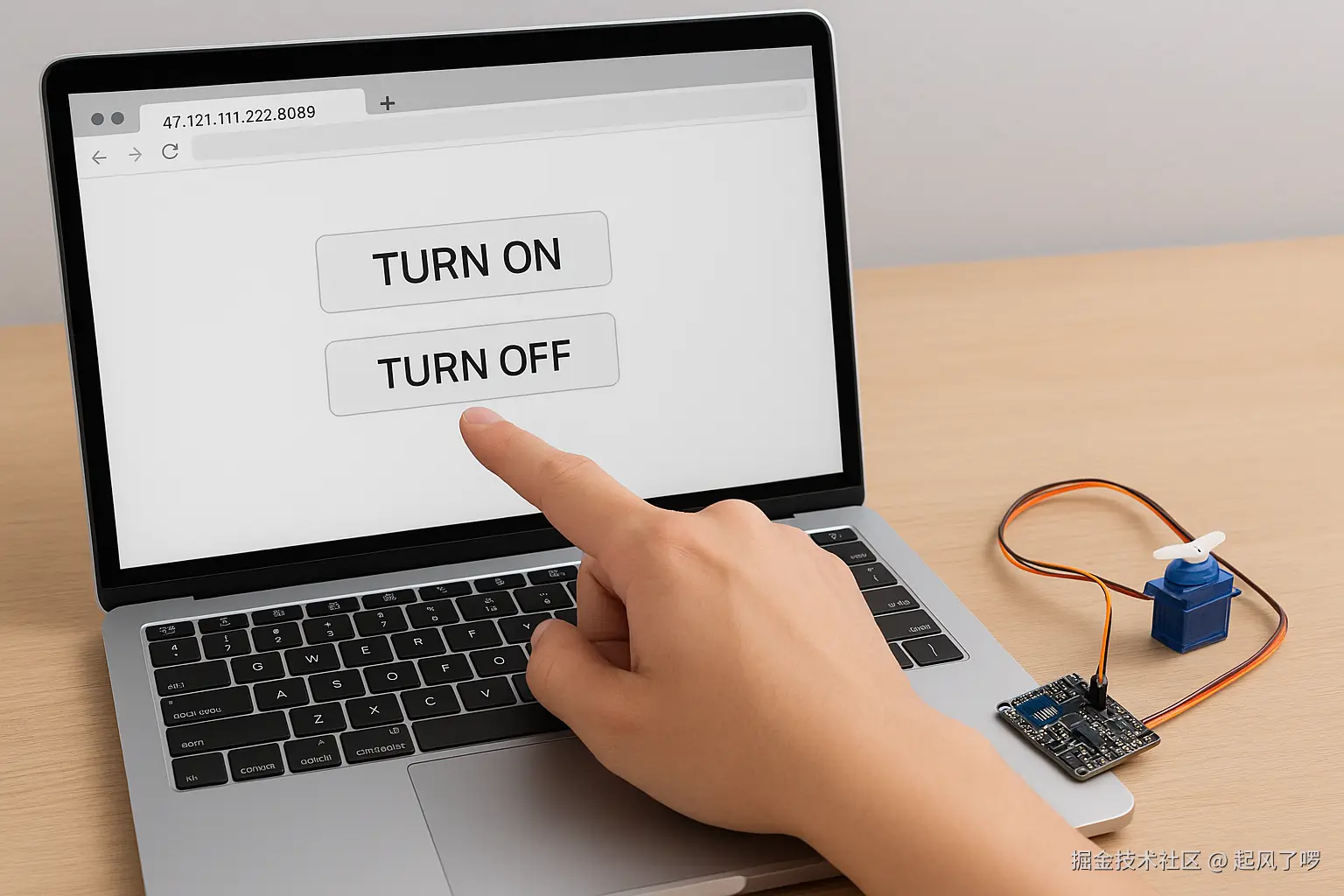
- 通过 公网 IP:8089 ,实现对 ESP8266 部署页面 的远程访问,点击页面开关灯按钮,控制舵机转动角度,控制开关灯。
二、ESP8266 编程,开关灯功能实现
- 硬件连接 将舵机与开发板正确连接。连接成功后,舵机会自动转动一下,发出轻微声音,这是正常现象。
- ESP8266 只支持 2.4GHz Wi-Fi,不支持 5GHz。所以Wi-Fi不能选用5G的,否则会出现链接不上
arduino
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <Servo.h>
// ==== 用户配置 WiFi ====
const char* ssid = "XXX";
const char* password = "XXX";
// ==== 对象实例 ====
Servo myServo;
ESP8266WebServer server(80);
// ==== 全局变量 ====
int currentAngle = 90; // 初始角度
// ==== HTML 页面 ====
const char* htmlPage = R"rawliteral(
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<title>舵机灯光控制</title>
<style>
body { font-family: Arial; text-align: center; margin-top: 50px; }
button { padding: 20px; font-size: 20px; margin: 20px; }
</style>
</head>
<body>
<h1>💡 舵机灯光控制</h1>
<button onclick="fetch('/servo?cmd=on')">开灯</button>
<button onclick="fetch('/servo?cmd=off')">关灯</button>
</body>
</html>
)rawliteral";
// ==== 初始化 ====
void setup() {
Serial.begin(9600);
myServo.attach(2); // GPIO2 (D4)
myServo.write(currentAngle);
// WiFi 连接
WiFi.begin(ssid, password);
Serial.print("连接 WiFi");
while (WiFi.status() != WL_CONNECTED) {
delay(500); Serial.print(".");
}
Serial.println("\nWiFi已连接");
Serial.print("IP地址: "); Serial.println(WiFi.localIP());
// 设置 Web 路由
server.on("/", []() {
server.send(200, "text/html", htmlPage);
});
server.on("/servo", []() {
if (server.hasArg("cmd")) {
String cmd = server.arg("cmd");
if (cmd == "on") {
myServo.write(0); // 开灯动作
delay(1000);
myServo.write(90); // 复位
currentAngle = 90;
}
else if (cmd == "off") {
myServo.write(180); // 关灯动作
delay(1000);
myServo.write(90); // 复位
currentAngle = 90;
}
server.send(200, "text/plain", "OK");
} else {
server.send(400, "text/plain", "缺少参数");
}
});
server.begin();
}
// ==== 主循环 ====
void loop() {
server.handleClient(); // 处理网页请求
}三、内网穿透
在公网服务器上运行 FRP (Fast Reverse Proxy)作为中转,实现内网设备的远程访问。不仅需要在安全组中配置规则,还需要手动放行7000,8089 端口, sudo firewall-cmd --zone=public --add-port=8089/tcp --permanent
-
FRPS(服务器端)配置示例
iniini 复制编辑 [common] bind_port = 7000 token = mytoken123 -
FRPC(客户端)配置示例
iniini 复制编辑 [common] server_addr = 1.2.3.4 # 你的公网服务器 IP server_port = 7000 token = mytoken123 [esp8266_tcp] type = tcp local_ip = 192.168.1.50 local_port = 80 remote_port = 8089 -
访问方式
部署完成后,可通过
http://公网IP:8089直接访问 ESP8266 提供的 Web 控制页面