实验背景
光学衍射计算成像是一种通过对光波前进行编码与解码,重建物体相位与强度信息的前沿成像技术。光学衍射计算高度依赖于对入射光场的精确量化测量,特别是光斑形态及时域波动特性的采集。
光斑的强度波动往往携带光学元件热漂移、大气扰动模拟或光源噪声等信息。因此,对光斑灰度值进行长时间、高信噪比的时间序列采集,是后续进行精确衍射建模与图像重构的前提。
某光电研究所,采用千眼狼一款95% QE、1.2e- 读出噪声、90dB高动态范围的科学级sCMOS相机 Gloria 4.2,在暗室环境中对红光激光光斑进行定量测量实验,以评估其在低光照、高稳定性需求场景下的适用性。
实验简介
-
实验目标:定量分析红光激光光斑在时间域内的强度与形态波动,验证千眼狼Gloria 4.2 sCMOS相机在低光照、高灵敏度条件下的成像稳定性。
-
实验对象:激光照射至CMOS靶面形成光斑,无中继光学系统。
-
实验设备:千眼狼Gloria 4.2 科学级sCMOS相机,2048×2048分辨率,16bit高动态模式下采集帧74fps。光源采用连续红光激光器,波长635nm。
-
实验方法:通过控制曝光时间,适度降低帧率,抑制光子带来的时域噪声。利用sCMOS相机采集多帧图像进行时域波动分析,并使用灰度值波动作为评价相机噪比SNR的关键指标。
-
实验难点:微弱光强波动易被传感器噪声掩盖,通过启用低噪声读出模式并匹配曝光时间与帧率使信号增强,提高信噪比。

实验数据解析
-
光斑质量 :
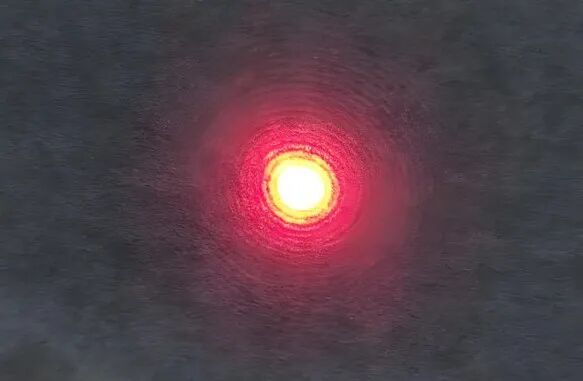
图1为科学相机Gloria 4.2在高动态模式下捕捉的光斑图像,显示光斑形态清晰、边缘锐利,无拖影,未出现饱和现象,保留了完整的光强分布信息。

图1
-
灰度时域稳定性 :
通过时域灰度直方图(图2)分析,光斑信号呈现类高斯分布特征,光斑灰度值波动幅度极小,均值、标准差数值稳定,无明显周期性噪声,表明Gloria 4.2科学相机具备优异的信噪比表现,满足对光强微弱波动定量分析的需求。
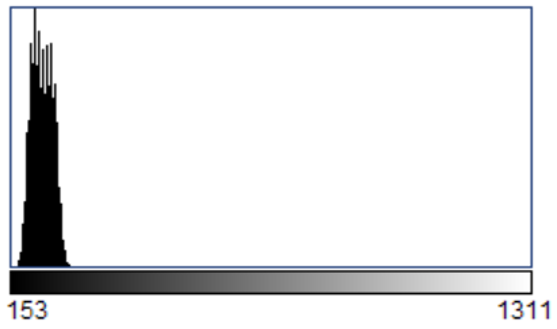
图2
实验结论
实验数据展示了千眼狼sCMOS相机Gloria 4.2对光斑灰度值波动的精准捕捉能力,其高QE、低读出噪声和高动态范围特性在光斑形态的时域波动分析中使得光斑的细微变化得以清晰呈现,为后续的数值处理与光场重建提供了高质量的原始数据,也为更复杂光学计算成像系统如波前传感、相干衍射成像中的相关应用奠定了基础。