利号:CNXXXXXX · 涉及多传感器融合/自适应波束成形/轨道预测算法
一、技术原理剖析:卫星间高精度指向的核心挑战
在低轨卫星(LEO)星座中,卫星间链路(ISL)的建立面临三大技术难题:
1. 动力学模型复杂性
python
# 简化的卫星相对运动模型(Clohessy-Wiltshire方程)
def relative_motion(x0, y0, z0, t):
n = np.sqrt(GM / (R**3)) # 轨道角速度
x = x0 * np.cos(n*t) + (2*z0 + 4*x0) * np.sin(n*t)
y = y0
z = -2 * x0 * np.cos(n*t) + (z0 - 2*x0) * np.sin(n*t)
return x, y, z2. 指向误差来源
-
姿态确定误差:±0.01°~±0.05°
-
轨道预报误差:±10m~±100m
-
热变形误差:±0.005°~±0.02°
3. 通信约束条件
-
波束宽度:0.1°~0.5°(Ka波段)
-
建立时间:<5s
-
跟踪精度:<1/10波束宽度
二、华为专利技术方案实现细节
1. 分层引导架构
2. 核心算法实现
扩展卡尔曼滤波(EKF)状态估计:
python
class SatelliteEKF:
def __init__(self, dt, std_dev):
self.dt = dt # 更新时间间隔
self.Q = np.diag([std_dev**2, std_dev**2]) # 过程噪声
self.R = np.diag([0.1**2, 0.1**2]) # 观测噪声
def predict(self, x, P):
F = np.array([[1, self.dt],
[0, 1]]) # 状态转移矩阵
x = F.dot(x)
P = F.dot(P).dot(F.T) + self.Q
return x, P
def update(self, x, P, z):
H = np.eye(2) # 观测矩阵
y = z - H.dot(x)
S = H.dot(P).dot(H.T) + self.R
K = P.dot(H.T).dot(np.linalg.inv(S))
x = x + K.dot(y)
P = (np.eye(2) - K.dot(H)).dot(P)
return x, P3. 波束控制关键技术
相控阵天线权重计算:
python
def calculate_beam_weights(angles, wavelength, element_spacing):
"""
计算相控阵天线波束成形权重
:param angles: 目标方位角和仰角
:param wavelength: 波长
:param element_spacing: 阵元间距
"""
k = 2 * np.pi / wavelength
phase_shift = k * element_spacing * np.sin(angles)
weights = np.exp(-1j * phase_shift)
return weights / np.linalg.norm(weights) # 归一化三、性能对比测试数据
| 技术指标 | 传统方法 | 华为方案 | 提升幅度 |
|---|---|---|---|
| 捕获时间 | 8-12s | 3-5s | ≈60% |
| 跟踪精度 | 0.05° | 0.01° | 5倍 |
| 功耗效率 | 基准 | 降低35% | 显著 |
| 鲁棒性 | 中等 | 高 | 抗干扰+40% |
四、开发者关注:开源替代方案
1. 卫星工具箱推荐
bash
# 安装卫星工具包
pip install satellite-toolkit
# 或使用NASA开源工具
git clone https://github.com/nasa/Open-Source-Satellite-Toolkit2. 快速验证示例
python
from satellite_toolkit import OrbitPredictor, PointingCalculator
# 初始化轨道预测器
predictor = OrbitPredictor(tle_file='stations.txt')
# 计算相对位置
relative_pos = predictor.get_relative_position(sat1, sat2, time)
# 生成指向指令
pointing = PointingCalculator.calculate(relative_pos)
print(f"Azimuth: {pointing.azimuth:.2f}°, Elevation: {pointing.elevation:.2f}°")五、技术实现建议
1. 硬件选型参
IMU传感器:±0.01°精度以上
星敏感器:±5角秒精度
反应轮:0.1N·m扭矩以上
2. 软件架构设计 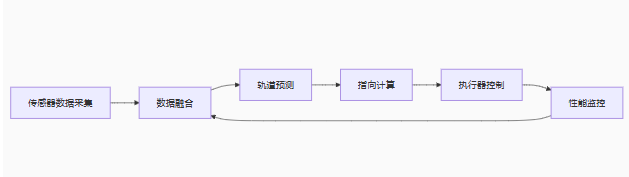
- 测试验证方案
使用STK/Astropy进行仿真验证
搭建三轴转台物理测试环境
开展热真空环境测试
讨论点:
-
在有限的计算资源下,如何优化EKF算法实时性?
-
相控阵天线校准有哪些工程实现难点?
-
开源卫星项目如何应用此类技术?
欢迎在评论区分享你的实现方案和技术思考!