手机号免费注册iSolarBP,一起来学习吧,注册获取无人机航线规划APP
登录--下载航线规划APP
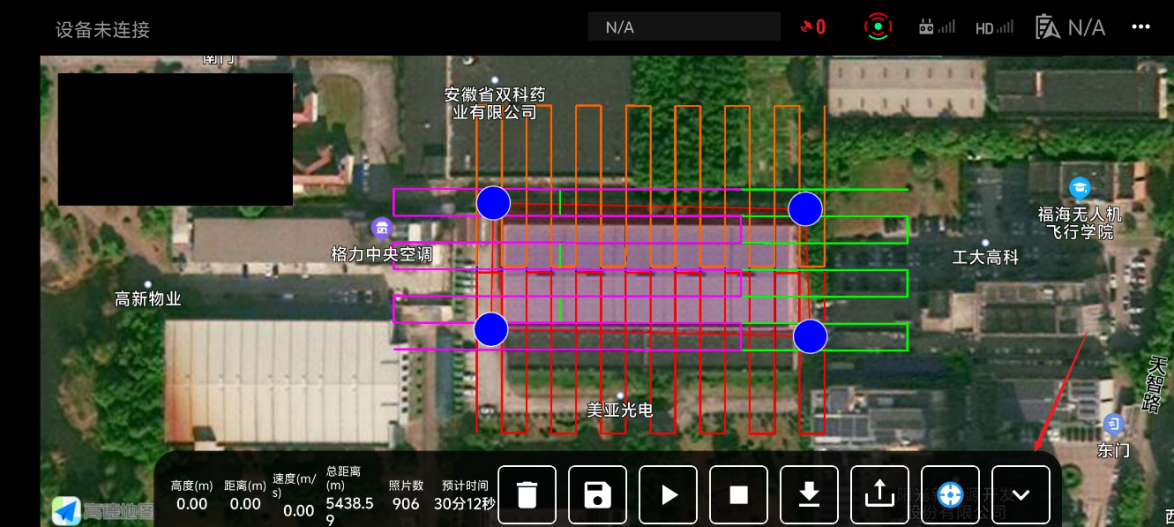
飞行参数设置
6.1飞行区域轮廓框选完成后,点击右下角下拉按钮可设置飞行参数
1.1飞行高度设置:可根据屋面面积进行判断,如飞行高度在80m以下、镜头俯视可拍到整个屋面范围,则飞行高度设置为当前高度;如无法完全覆盖,则飞行高度建议设置在80~100m范围,最高不得超出120m
参数说明 :飞行高度指无人机相对起飞点的垂直高度。
基础原理 :飞行高度直接影响地面分辨率(GSD)和拍摄范围。高度越低,分辨率越高,但单张照片覆盖范围越小;高度越高,覆盖范围越大,但分辨率可能降低。
设置建议:
-
若屋面面积较小(飞行高度≤80m 时镜头俯视可完整覆盖屋面),建议按当前高度设置。
-
若屋面面积较大或结构复杂,建议高度设置在80~100m,最高不超过120m(需符合当地空域法规)。
-
注意:过高飞行可能导致细节丢失,过低则可能增加航线长度和飞行时间。
1.2 外扩范围 外扩范围:目标区域外扩一定距离,当前软件可设置为5m
参数说明 :外扩范围指在目标区域边界外额外扩展的飞行范围。
基础原理 :外扩可确保目标区域边缘的覆盖完整性,避免因无人机定位误差或镜头畸变导致边缘建模缺失。
设置建议:默认外扩5m,可根据实际需求调整(如复杂地形或需更高边缘精度时可适当增加)

1.3 航向重叠率:指前后两个拍摄点位间的照片重叠率,重叠率越高飞行时间越久、模型越清晰,建议默认80%
航向重叠率:
-
定义:同一航线内相邻两张照片的重叠比例。
-
原理:高重叠率(建议80%)可提供更多匹配特征点,提升三维模型重建的准确性和纹理细节。
-
影响:重叠率过低可能导致模型空洞或扭曲。
1.4 旁向重叠率:两条航线间的照片重叠率,重叠率越高飞行时间越久、模型越清晰,建议默认80%
旁向重叠率:
-
定义:相邻两条航线之间照片的重叠比例。
-
原理:保证航线间照片的连续性,避免漏拍(建议默认80%)。
-
注意:重叠率越高,照片数量越多,处理耗时增加,需平衡效率与质量。

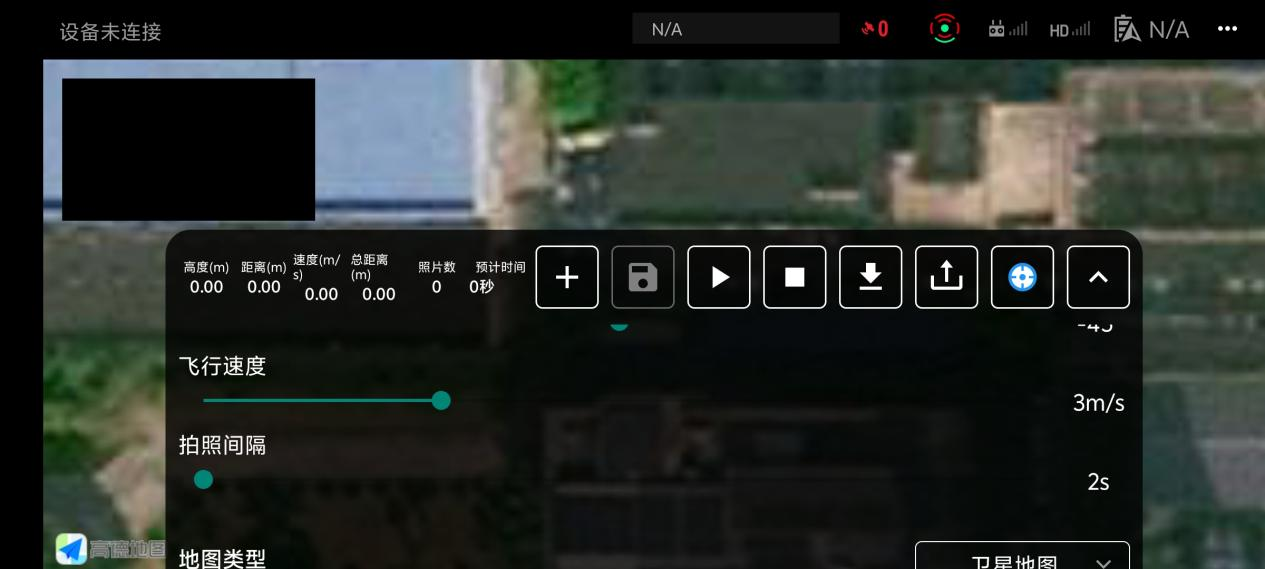
飞行速度:无人机飞行速度,与整个航线耗时相关,最大可设置为8m/s
飞行速度:
-
定义:无人机沿航线飞行的速度(单位:m/s)。
-
原理:速度越快,单航线耗时越短,但需与拍照间隔协同设置以确保照片重叠率。
-
建议:最大不超过8m/s,复杂场景可适当降低速度。
拍照间隔:无人机拍照频率,间隔越小拍摄照片越多、模型越清晰,默认建议6s,可根据实际需求调整
拍照间隔:
-
定义:无人机自动拍摄相邻照片的时间间隔。
-
原理:间隔越短,照片数量越多,模型细节越丰富,但会增加数据处理量。
-
建议:默认6s,可根据飞行速度和重叠率动态调整(公式:间隔 ≤ 航线间距 / 飞行速度 × 重叠率系数)。
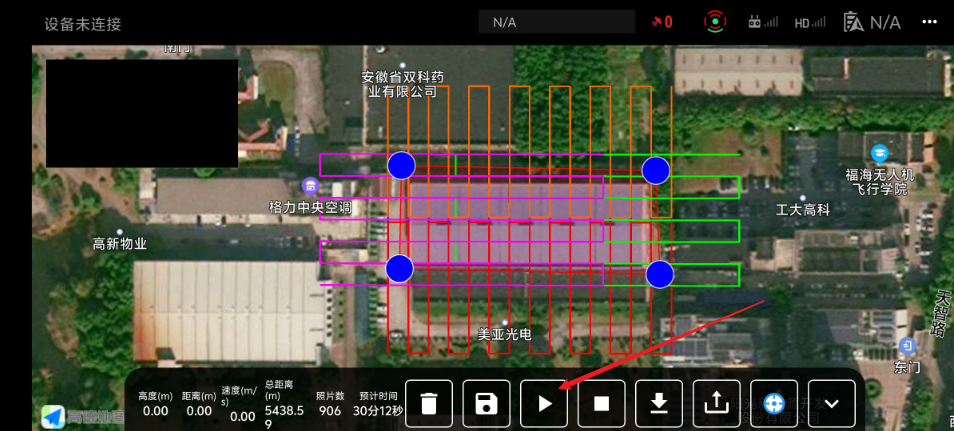
设置完成后点击保存按钮,航线及飞行参数将保存
7.启动无人机
点击开始按钮,无人机将按规划航线飞行,注意飞行过程中的无人机电量,电量不足20%时请及时召回起飞点,更换电池。飞行过程中如遇特殊情况,可随时通过手柄召回无人机,召回后或者电池更换完成后,点击开始按钮,无人机将在断点的位置继续执行飞行任务
8.无人机返航
航线完成后无人机将自动返回起飞点,此时注意观察无人机降落位置,可能与起飞位置有偏差,注意人为控制手柄手动调整位置,避免炸机
9.航拍图片上传建模
9.1飞行完成后击下载按钮,将无人机内存卡中的照片传输至手机(此过程不消耗流量)
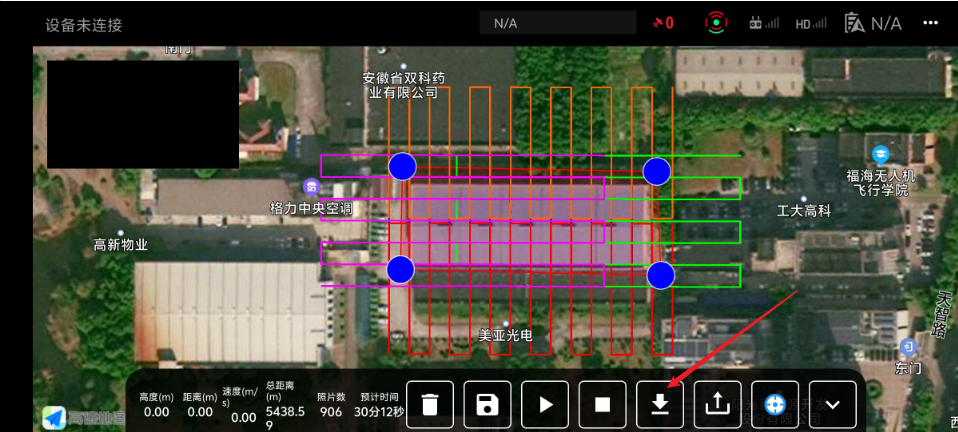
9.2无人机照片下载至手机后需要点击上传按钮至建模平台(此过程需要消耗手机流量,可连接无线网上传),上传成功后手机端图片将自动删除。

建模和组件排布效果 啦啦啦啦啦 这就出来啦
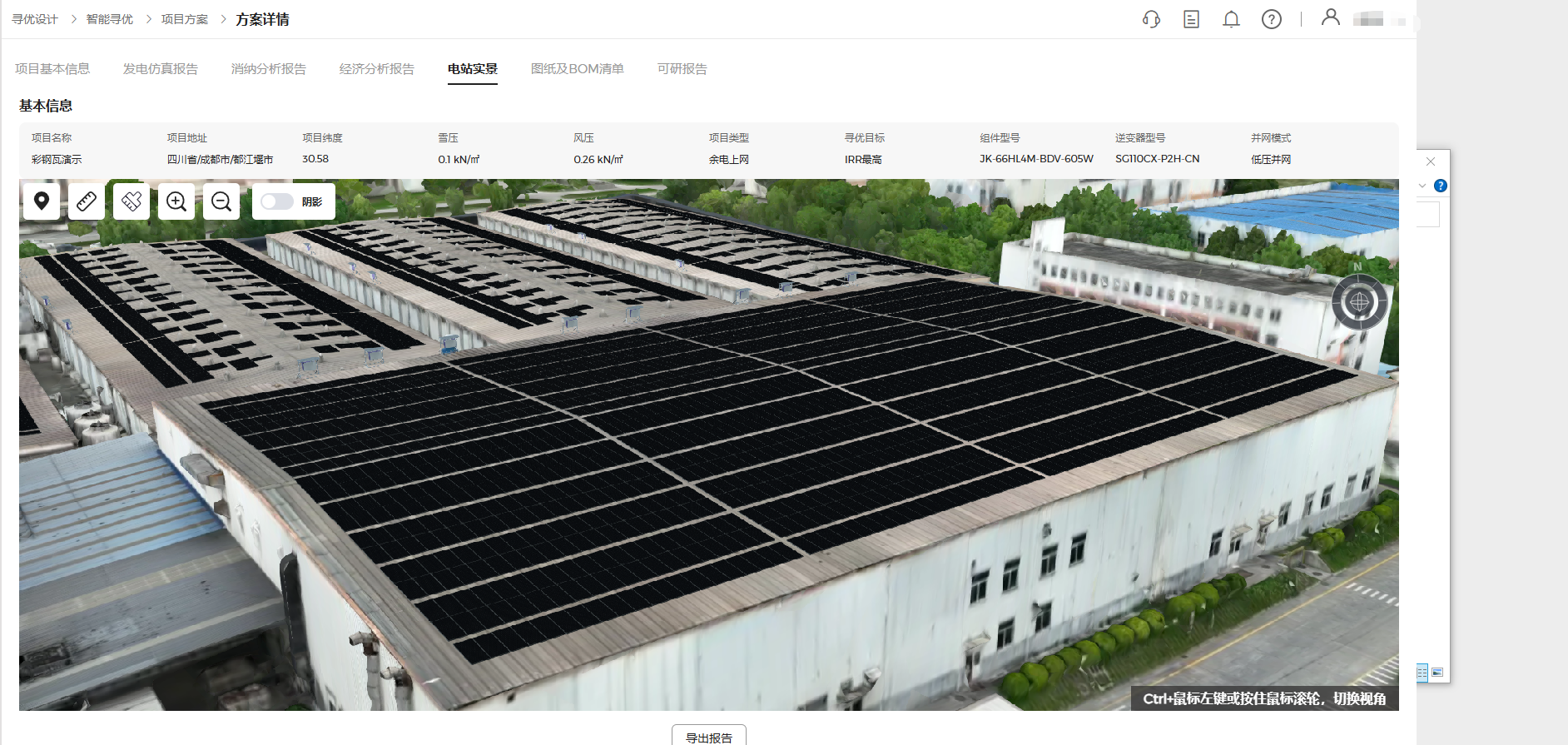
把我的模型分享给你们看一下吧 嘿嘿 太棒了 我不是消费级无人机哦 哈哈哈