1. 前言
-
自制底板
-
核心模组是 Jetson AGX Orin 64G
-
SDK 是 Jetpack6.2 36.4.3
-
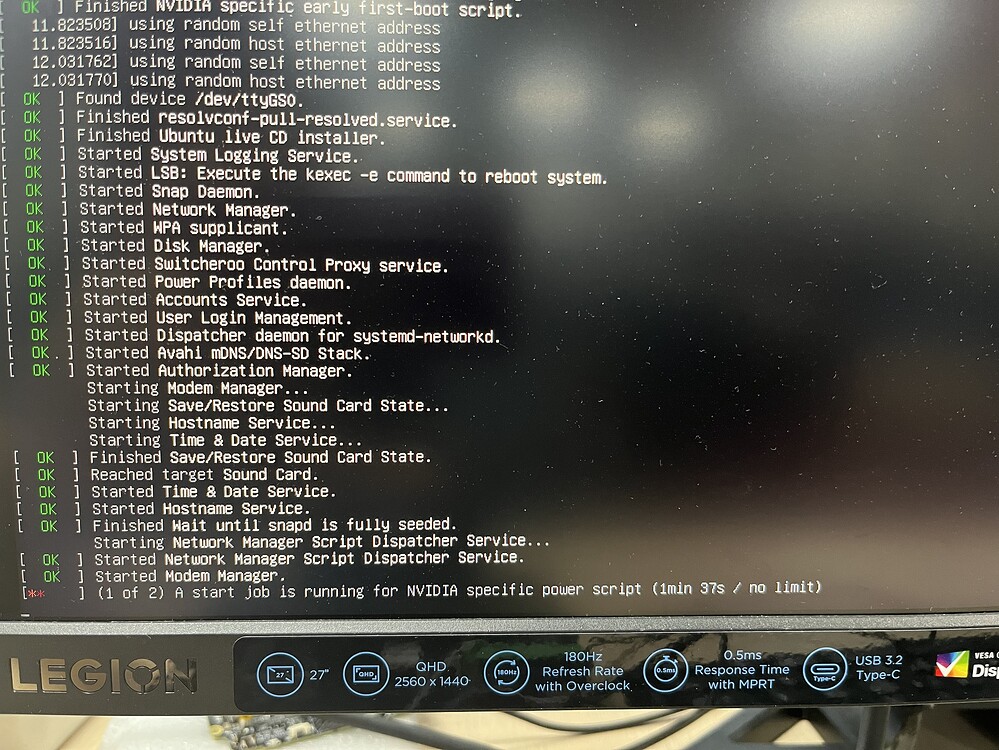
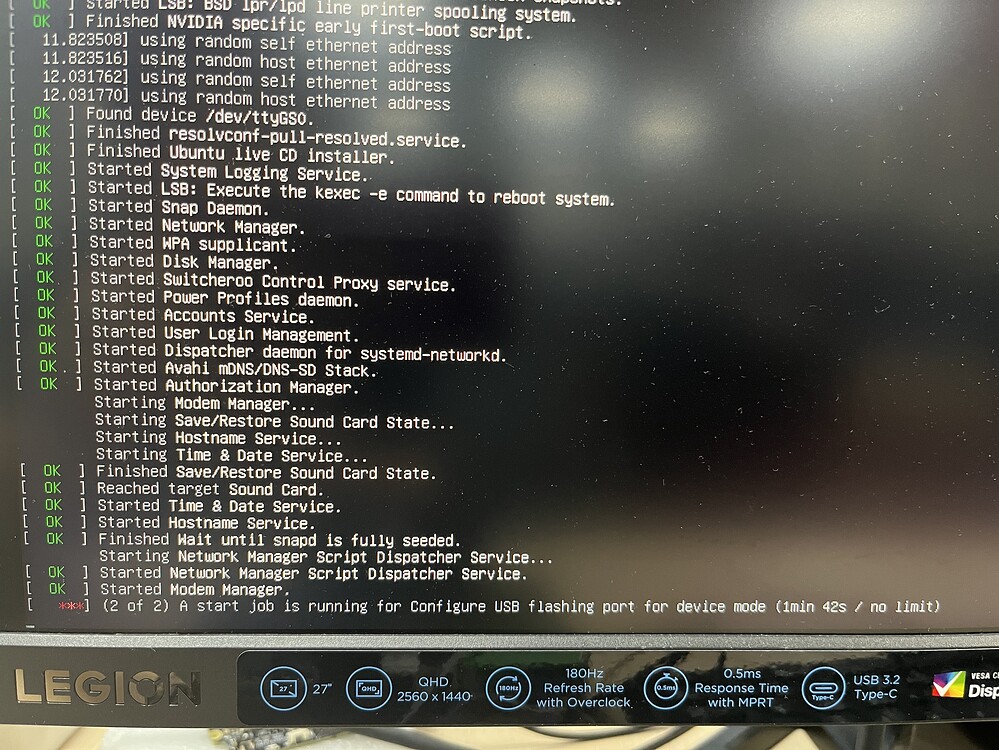
多次 reboot 测试后,系统会一直卡在 "A start job is running for"
2. 使用NV devkit测试
NV devkit 做 reboot 测试,目前没复现到问题
3. 分析硬件
由于自制底板是带有一个RTC芯片,dts 里 disabled 这个 RTC 芯片,
reboot 测试经过一晚上测试没复现到问题。
RTC 芯片使用的驱动是 Linux_for_Tegra/source/kernel/kernel-jammy-src/drivers/rtc/rtc-pcf8563.c
为什么外部的RTC芯片会影响到系统?
4. 编译进内核
把 RTC 的驱动编译进 Image,而不是 ko 的方式,
目前测试一晚上reboot,没有复现到问题