现象:复现问题
原因:问题分析、溯源,定位根本原因;
方案:提出解决方案、规避措施
验证:导入、验证方案是否可行(先小批量、再大批量);
一. 现象
产线反馈4pcs预览又脏污、划痕(共有40pcs模组);
二. 原因
直接原因:IR滤光片破碎导致;
根本原因:工人装配时,挤压到模组镜头;
三. 分析
-
将所有问题模组寄回;
-
收到模组后,4pcs模组都能复现问题;
-
交叉验证分析和模组本体有关;
-
寄给模组厂分析:
IR玻璃碎了、划伤了芯片;
(现象1)
(现象2)
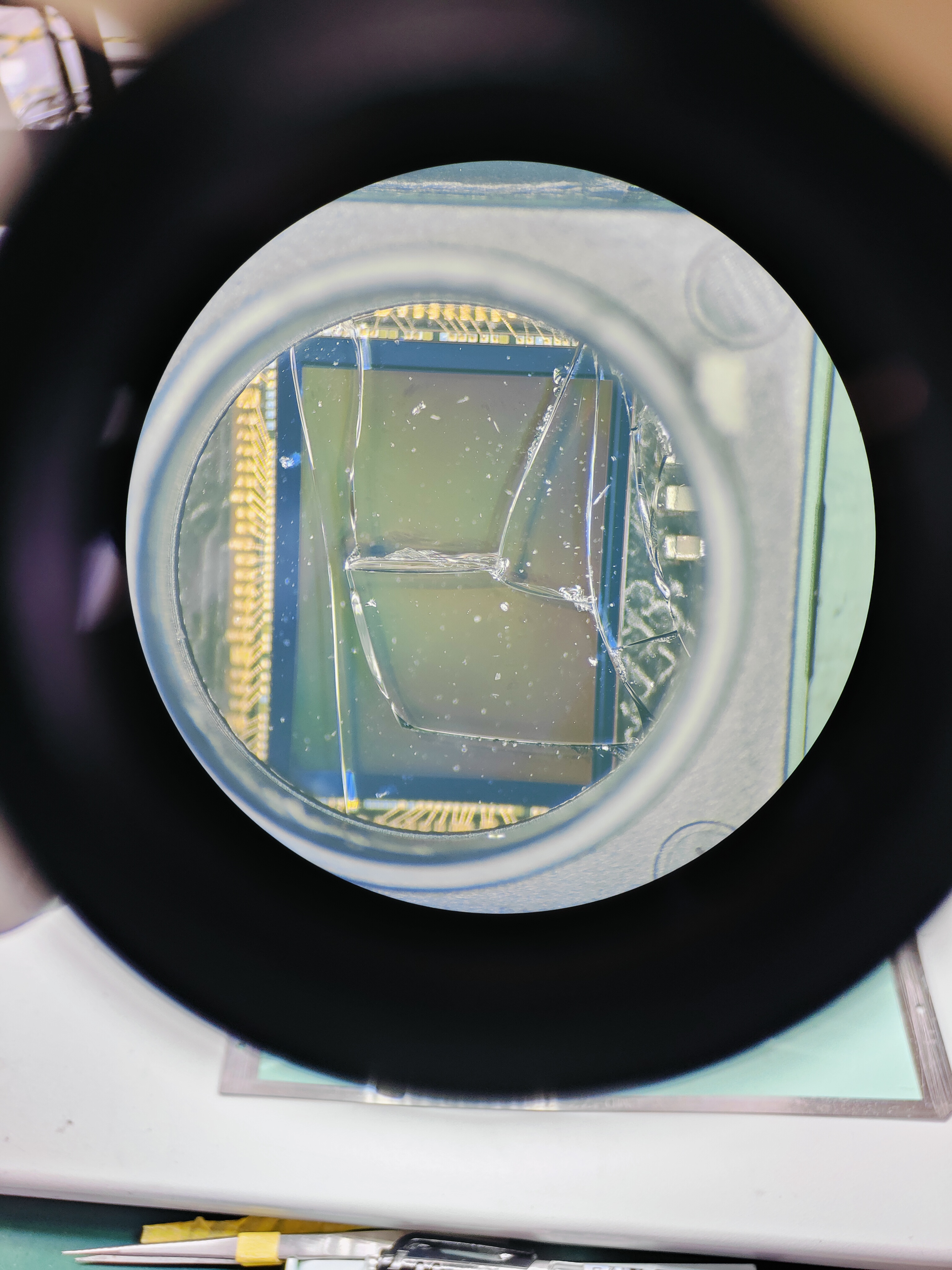
(放大镜查看1)
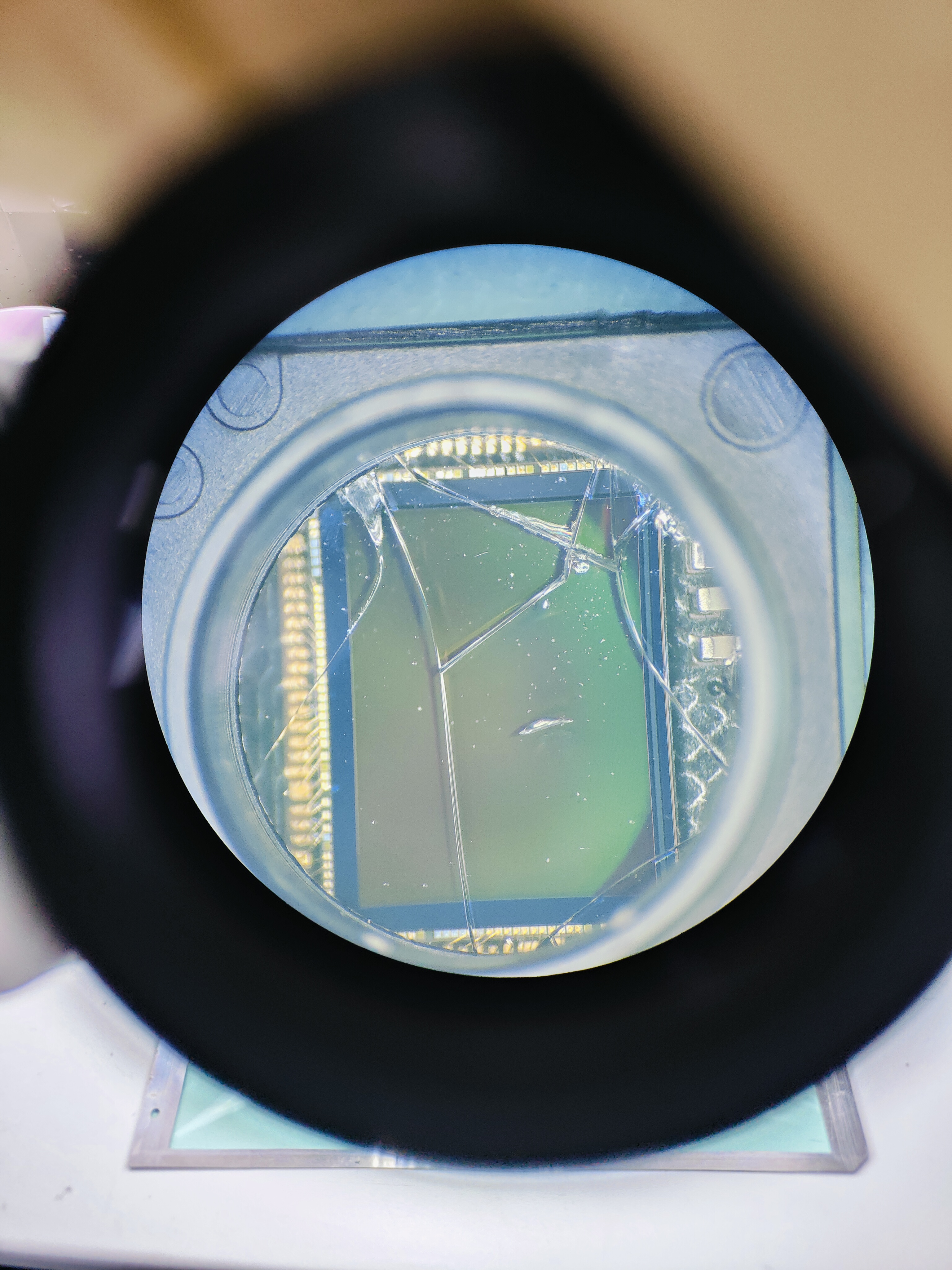
(放大镜查看2)
- 溯源:
工厂NPI反馈半成品时,未发现上述问题,说明大概率是DVT装机时出现的。
暂时排除结构设计问题;
四. 提出解决方案:
临时方案:先用手改IR模组替换,后面让模组厂补发4pcs良品;
长久方案:结构、工厂装机时注意;
五.方案验证:
先小批量导入、验证,没有问题后再大批量导入、验证;
后面PVT装机200套时未发现此问题;