目录
[1.2 find](#1.2 find)
[1.3 insert函数](#1.3 insert函数)
[1.4 erase函数](#1.4 erase函数)
[2.2 默认成员函数](#2.2 默认成员函数)
[2.3 find](#2.3 find)
[2.4 insert函数](#2.4 insert函数)
[2.5 erase函数](#2.5 erase函数)
1.闭散列实现
使用除留余数法计算哈希地址,线性探测解决哈希冲突
1.1前提准备
namespace open_address
{
//使用状态标记,便于插入、删除、查找
enum STATE
{
EXIST,
DELETE,
EMPTY
};
template<class K, class V>
struct HashData
{
pair<K, V> _kv;
STATE _state = EMPTY;
};
template<class K, class V>
class HashTable
{
public:
private:
vector<HashData<K, V>> _table;
size_t _n; //存储的有效数据的个数
};
}(1)为防止与后续的开散列实现发生命名冲突,创建一个命名空间
(2)枚举出元素的状态供后续使用
(3)HashData这个类定义了哈希表所存储的数据(这里使用的是KV模型)
将HashData初始状态值为EMPTY
(4)hashTable这个类用来实现HashData的插入、删除、查找等功能
1.2 find
查找某一个元素时,我们先通过除留余数法找到对应的哈希地址,但是由于哈希冲突与线性探测解决方式的可能,如果当前位置找不到,我们就会从冲突位置开始向后寻找该元素
因为要插入的值会存放在从冲突位置开始向后的第一个EMPTY 位置,那么查找时一定是遇到第一个EMPTY位置就停止
HashData<const K, V>* find(const K& key)
{
int hashi = key % _table.size();
//由于哈希冲突的可能,所以可能需要向后找,遇到空停止
//遇到删除继续寻找
while (_table[hashi]._state != EMPTY)
{
if (_table[hashi]._state == EXIST
&& _table[hashi]._kv.first == key)
return (HashData<const K, V>*) & _table[hashi];
//这里指针类型不一致,显示转换一下
++hashi;
hashi %= _table.size();
}
return nullptr;
}(1)并不是所有的键值key都是整型,能够做取模操作
解决方法:使用仿函数将其转换为整型
template<class K, class V, class HashFunc = DefaultHashFunc<K>> class HashTable; HashFunc hf; int hashi = hf(key) % _table.size();
默认仿函数肯定是将数值(负数,整型等)显示转换为整型
但是如果键值key是字符串,我们就需要想办法将其转换为整型
template
struct DefaultHashFunc
{
size_t operator()(const K& key)
{
return (size_t)key;
}
};template<>
struct DefaultHashFunc
{
size_t operator()(const string& str)
{
size_t hash = 0;
for (auto ch : str)
hash = hash * 131 + ch;//字符串哈希算法
return hash; }};
使用模板的特化,将字符串转化为整型
处理字符串的过程中,如果只是转换字符串的首字符为整型,哈希冲突的概率极大
如果将字符串中所有字符的ASCII值相加,类似"abbc""acbb""abad"的几个字符串又会冲突
所以大佬们针对性的研究出了字符串哈希算法(小编能力有限,大家参考各种字符串Hash函数 - clq - 博客园)
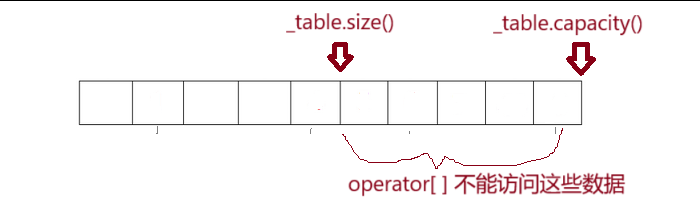
(2)int hashi = hf(key) % _table.size() 中模的是_table.size()这是因为后续要通过 hashi 调用 _table的 operator 函数,operator 函数会对相应下标进行检测,如果越界就会直接报错
为了避免越界访问,我们在初始化时,将size与capacity 的大小设为一致
HashTable() { _n = 0; _table.resize(10);//调用hashData的默认构造 }
(3)while循环中,根据哈希表中数据的状态以及键值的比较判断数据是否存在,
返回时需要显示类型转换,因为指针类型不同(HashData<const K,V>*、HashData<K,V>*)
使用const修饰参数K是为了防止外界修改键值
(4)从后往前找,最后一个元素的下一个位置就是首元素位置,处理方法:
++hashi; hashi %= _table.size();

1.3 insert函数
bool insert(const pair<K, V>& kv)
{
if (find(kv.first))
return false;
//扩容逻辑:哈希表不能太满,太满会使查找、插入的效率下降
//插入
return true;
}如果哈希表中已经有了该数据,就不再存储
插入
//插入
HashFunc hf;
int hashi = hf(kv.first) % _table.size();
//可能存在哈希冲突,向后寻找空或被删除的位置
while (_table[hashi]._state == EXIST)
{
++hashi;
hashi %= _table.size();//从后往前找
}
//修改状态,改值
_table[hashi]._state = EXIST;
_table[hashi]._kv = kv;
++_n;
return true;(1)同样注意仿函数、取模的使用,潜在的哈希冲突问题通过线性探测找到空位置
(2)找到空位置后,修改该位置的元素及其状态
(2)最后注意 ++_n
扩容
//扩容逻辑:哈希表不能太满,太满会使查找、插入的效率下降
if ((double)_n / _table.size() >= 0.7)
{
int newSize = _table.size() * 2;
//不能将原表直接扩容,因为
//扩容可能会导致值存放的位置发生改变
HashTable<K, V> newHt;
newHt._table.resize(newSize);
//复用insert函数
for(int i = 0; i < _table.size(); ++i)
{
if(_table[i]._state == EXIST)
newHt.insert(_table[i]._kv);
}
//两个vector进行交换
_table.swap(newHt._table);
}(1)当载荷因子大于等于0.7时就扩容,判断条件注意类型转换
(2)不能 _table.resize(newSize); 进行扩容操作,这是因为
扩容可能会导致原来冲突的哈希值不冲突,原来不冲突的哈希值冲突,所以需要重新计算
(3)解决方法:
建立一张新的哈希表,遍历旧表,复用insert函数完成新表的插入,最后完成表的交换即可
1.4 erase函数
bool erase(const K& key)
{
auto ret = find(key);
if (!ret)
return false;
else
{
ret->_state = DELETE;
--_n;
return true;
}
}复用find函数,找到该元素后,修改元素状态和哈希表的有效数据个数
程序结束会自动调用HashData的析构函数清理资源
2.开散列实现
使用除留余数法计算哈希地址,链地址法解决哈希冲突
2.1前提准备
namespace hash_bucket
{
template<class K, class V>
struct HashNode
{
pair<K, V> _kv;
HashNode<K, V>* _next;
HashNode(const pair<K, V>& kv)
:_kv(kv), _next(nullptr)
{}
};
template<class K, class V, class HashFunc = DefaultHashFunc<K>>
class HashTable
{
typedef HashNode<K, V> Node;
public:
private:
vector<Node*> _table;
size_t _n;
};
}(1)对于每一个哈希桶,使用的是单链表存储数据, HashNode就是数据节点
(2)这里仍需仿函数来完成字符串的整型转换操作
(3)_table 存储的就是每一个单链表的头节点,_n指的是有效数据的个数
(4)HashTable完成数据的增删查改工作
2.2 默认成员函数
-
构造函数
HashTable()
{
_n = 0;
_table.resize(10, nullptr);//这里不会去调用HashNode的构造函数
} -
析构函数
~HashTable()
{
for (int i = 0; i < _table.size(); ++i)
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;
delete cur;
cur = next;
}
_table[i] = nullptr;
}
}
析构函数的思路就是,从哈希表的第一个有效位置(指针不为空)开始,依次清理节点
因为节点 是我们手动创造的,需要我们手动释放,前面的闭散列实现方法中我们并没有手动创建资源
-
拷贝构造函数
HashTable(const HashTable<K, V>& ht)
{
_n = ht._n;
_table.resize(ht._table.size());
for (int i = 0; i < ht._table.size(); ++i)
{
Node* cur = ht._table[i];
while (cur)
{
Node* newnode = new Node(cur->_kv);
newnode->_next = _table[i];
_table[i] = newnode;cur = cur->_next; } }}
拷贝构造的重点是防止浅拷贝(不同哈希表指向相同的节点,导致最终资源二次释放)
拷贝构造的思路同样是遍历旧表,创建新节点存储对应的数据
注意新表的有效数据个数和大小与旧表一致
-
赋值重载函数
HashTable<K, V>& operator=(HashTable<K, V> ht)
{
_n = ht._n;
_table.swap(ht._table);return *this;}
形参 ht 完成对传入哈希表的深拷贝,这里只需要交换 _table ,修改有效值个数即可
2.3 find
HashNode<const K, V>* find(const K& key)
{
HashFunc hf;
int hashi = hf(key) % _table.size();
Node* cur = _table[hashi];
while (cur)
{
if (cur->_kv.first == key)
return (HashNode<const K, V>*)cur;//指针类型不匹配需要显示转换
cur = cur->_next;
}
return nullptr;
}(1)对于仿函数、取模、类型转换的解释参考 闭散列实现的find函数
(2)开散列中,查找的思路是,通过取模找到对应的哈希地址,然后遍历链表进行查找
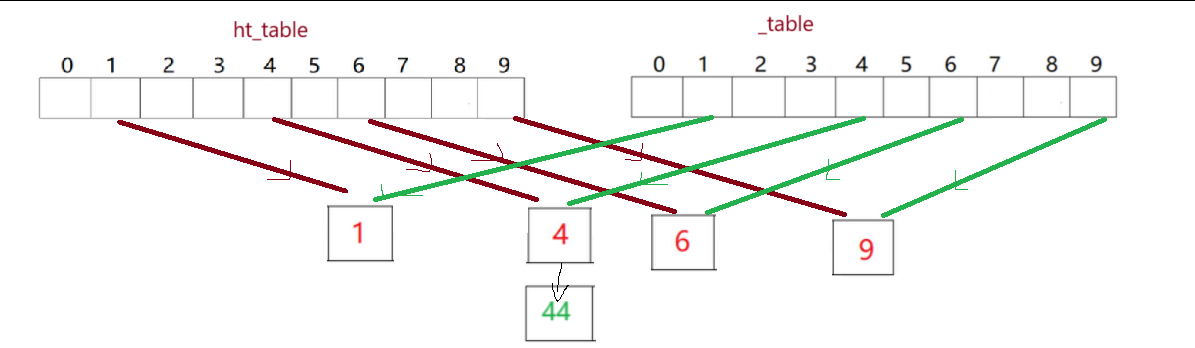
2.4 insert函数
bool insert(const pair<K, V>& kv)
{
//去重
if (find(kv.first))
return false;
//扩容:尽量使每一个桶只有一个数据,这样效率就非常高了
//插入
return true;
}哈希表中有相同值就不再进行插入
插入
//插入
HashFunc hf;
int hashi = hf(kv.first) % _table.size();
Node* newnode = new Node(kv);
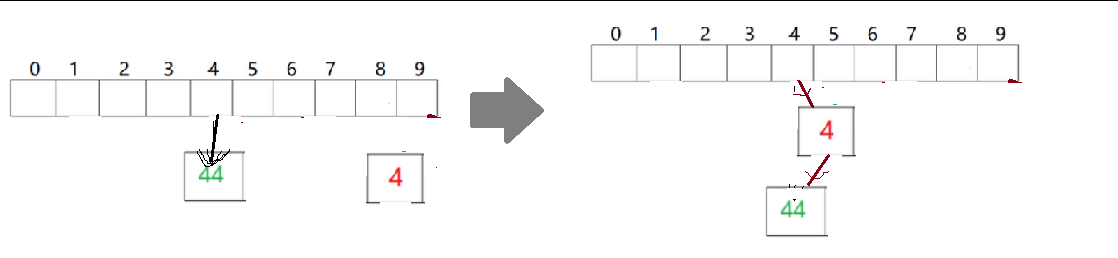
//头插
newnode->_next = _table[hashi];
_table[hashi] = newnode;
++_n;对于仿函数、取模、的解释参考 闭散列实现的find函数
这里的插入方式实际上是单链表的插入方式:
对于单链表,头插的效率极高,实现方式:
当前节点成员单链表的头节点,当前节点的next指针指向原来的头节点
注意修改有效值_n
扩容
if (_n == _table.size())
{
int newSize = _table.size() * 2;
vector<Node*> newTable;
newTable.resize(newSize);
//遍历旧表,顺手牵羊
for (int i = 0; i < _table.size(); ++i)
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;
//映射关系要发生改变
HashFunc hf;
int hashi = hf(cur->_kv.first) % newSize;
cur->_next = newTable[hashi];
newTable[hashi] = cur;
cur = next;
}
_table[i] = nullptr;
}
_table.swap(newTable);
}(1)在元素个数刚好等于桶的个数时,可以给哈希表增容,这样查找的效率极高
(2)不能让旧表直接扩容,应该创建新表,重新映射插入数据后进行交换操作
(3)这里的重点是,我们不选择复用insert函数,因为旧表中的节点都是我们手动创建的,如果我们选择复用insert函数的话,我们需要在复用完成之后交换哈希表之前完成节点的资源释放,否则就会造成资源泄露,
创新方法:遍历旧表,从有效位置(节点指针不为空)开始,将节点"摘"到新的哈希表中(这里需要更新哈希地址同时注意头插及cur指针的移动),最后完成交换操作即可
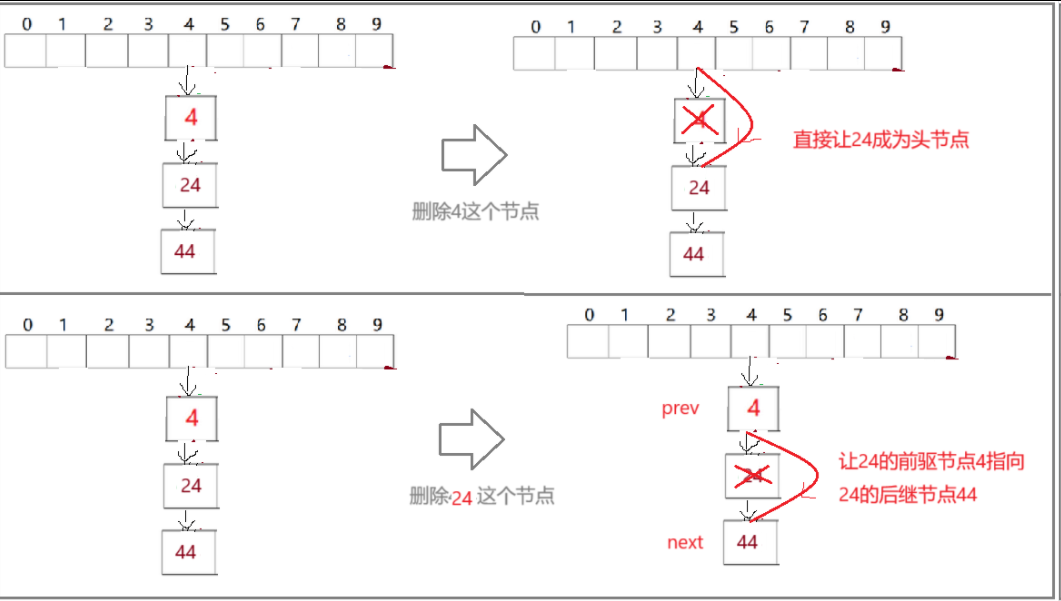
2.5 erase函数
bool erase(const K& key)
{
HashFunc hf;
int hashi = hf(key) % _table.size();
Node* prev = nullptr;
Node* cur = _table[hashi];
while (cur)
{
if (cur->_kv.first == key)
{
if (!prev)
{
_table[hashi] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
--_n;
delete cur;
return true;
}
//注意移动,不然内存泄漏
prev = cur;
cur = cur->_next;
}
return false;
}(1)这里不选择复用 find函数而只是复用查找的逻辑,是因为单链表的头删和中间删除有区别
2.6 Print函数
void Print()
{
for (int i = 0; i < _table.size(); ++i)
{
printf("[%d]->", i);
Node* cur = _table[i];
while (cur)
{
cout << cur->_kv.first << ":" << cur->_kv.second << "->";
cur = cur->_next;
}
printf("NULL\n");
}
cout << endl;
}可以使用该函数打印开散列方法实现的哈希表