参数辨识 是控制理论中系统辨识 的重要环节,在电机控制中的主要目的是获取控制应用中常用到的参数,例如电阻电感反电动势和初始角等,这些参数都可以通过辨识算法识别。
目前业内常用的一种参数辨识实现方式是将采集的数据输入计算机系统进行离线辨识,虽然不带有实时性,但是成本低,实现简单。
一、电阻辨识算法
(1)原理
欧姆定律通常以一种线性关系求得线路电阻
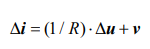
我们换为增量式
因为主控电路与驱动电路自身带有电压偏置,所以辨识过程的零状态响应存在偏差,并一直动态作用于测量系统中,所以必须采用增量式测量电阻
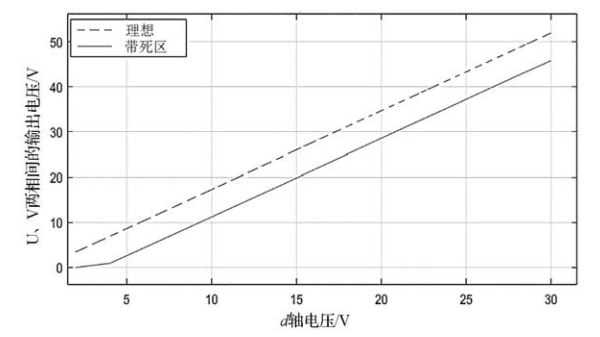
例如,逆变电路双相输入输出存在死区特性
此外,器件、驱动电路参数、死区、总线电压等因素也会让漂移变化,所以很难用绝对量估算电阻。
从拉式域的角度看,三相逆变电路中任两相组合可被认为是一个一阶惯性环节,传递模型为
需要注意的是,在理论上讲(T和K固定时),惯性环节所造成的延迟总有一刻会被消除。
但是在PMSM三相逆变系统中,T的由于器件、驱动电路参数、死区而浮动。
总线电压的波动也会影响K的大小,所以,才呈现了上图的平行状态。
咋样,这么理解不就串起来了吗?
但是实际输入输出电压关系保持着一定程度的线性特性(如上图),所以用增量式求电阻阻值是比较可靠的。
(2)实现过程
因为永磁电机在给定两端电压时,电流会存在剧烈飘动,我们不妨从(电压->电流)的思路转变为(电流->电压)的方法。
可以先确定两个电流给定值 (适中,差异明显,取额定电流附近,以获得更大的信噪比),然后通过电流闭环让电机达到给定值。
但是由于SVPWM波形精度限制,闭环时电流会出现比较明显的极限环效应 ,也就是会出现有一定规律性的波动(此时不能用带宽法给出精确参数,因为电机参数都不清楚啊)。
此时,我们立刻从闭环进入开环模式,电流会随之平滑,而电压也通过电流环控制确定了。
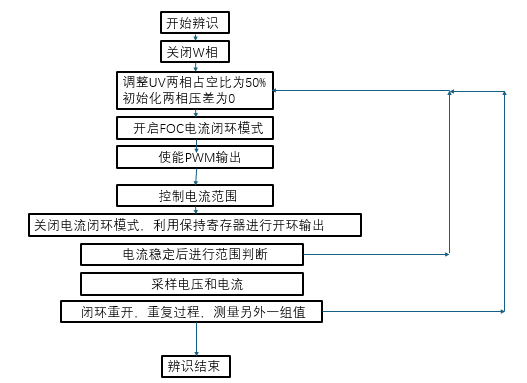
具体控制策略如下图所示
(3)数据处理
在系统噪声环境下,电阻辨识空间状态方程为
其中:

v为白噪声:
由最小二乘法得到电阻估计值计算公式:

Ri为每次取差值测量的电阻阻值
总结
电阻辨识是电机参数辨识中最基本的内容,理解其控制策略十分重要