
在基于 Arduino 平台与无刷直流电机(BLDC)驱动的群体机器人协同探索(Swarm Robotic Cooperative Exploration)系统中,多个低成本、低算力的智能体通过局部感知与简单通信规则,共同完成对未知环境的覆盖、建图或目标搜寻任务。尽管 Arduino 资源受限,但凭借其低功耗、高可靠性和模块化扩展能力,结合 BLDC 电机的高效动力输出,仍可构建具备实用价值的微型群体机器人系统。
一、主要特点
. 去中心化与自组织行为
群体机器人不依赖中央控制器,每个个体仅依据局部传感器信息(如红外、超声波、光强)和邻近机器人状态(通过短距通信)做出决策。
典型协同策略包括:
人工势场法:障碍物产生斥力,目标/队友产生引力;
领航-跟随模型:部分机器人作为"探索先锋",其余自动保持队形;
覆盖算法(如 Lévy walk、随机游走 + 避碰):最大化环境探索效率。
. Arduino 的轻量化嵌入式实现
利用 Arduino(如 Nano、Mega 或 ESP32)的实时性与低延迟中断响应,可高效执行:
传感器数据采集(每 10--50 ms 一次);
简单状态机决策(如"探索 → 遇障 → 转向 → 广播位置");
通信协议解析(如 nRF24L01、LoRa、XBee 的轻量包)。
所有算法需采用整数运算、查表法或布尔逻辑,避免浮点与复杂矩阵操作。
. BLDC 电机赋能高机动性与续航
相较于传统有刷电机,BLDC 具有:
更高能效比(>85%),延长电池续航,适合长时间探索;
快速动态响应,支持频繁启停与方向切换;
低电磁噪声,减少对通信模块(如 2.4 GHz RF)的干扰。
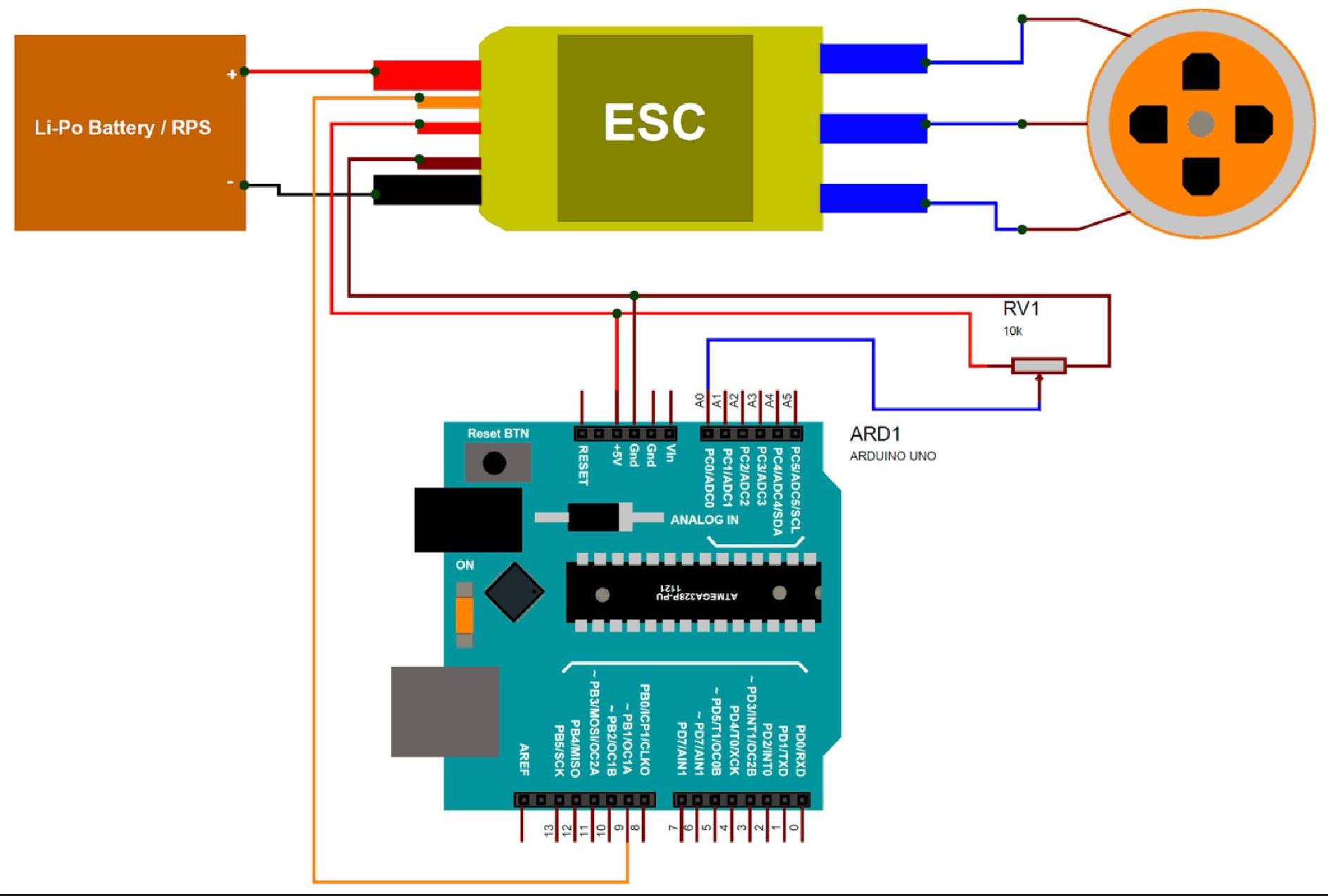
配合电子调速器(ESC)或 FOC 驱动器(如 SimpleFOC 库),可实现差速转向、原地旋转等灵活运动模式。
. 有限通信下的信息共享机制
受限于 Arduino 的通信带宽,群体间通常仅交换关键元数据,例如:
本地坐标(相对或绝对);
探索状态("已覆盖"/"发现目标");
障碍物标记("前方 30 cm 有墙")。
通信拓扑多为广播式或邻居对邻居(neighbor-to-neighbor),避免全局同步开销。
二、典型应用场景
. 灾害搜救与危险环境侦察
在地震废墟、核泄漏区域或火灾现场,部署数十台小型 Arduino-BLDC 机器人,通过协同覆盖快速定位幸存者或热源,降低人员风险。
. 农业智能巡检
在温室或果园中,群体机器人沿行间自主移动,协同完成土壤湿度、病虫害或果实成熟度的分布式感知,BLDC 电机适应潮湿、多尘环境。
. 室内仓储与物流盘点
多台小车在仓库中并行扫描 RFID 标签或二维码,通过协同路径规划避免碰撞,并动态分配未覆盖区域,提升盘点效率。
. 教育与科研实验平台
高校机器人实验室常用 Arduino 群体系统演示自组织、涌现行为、分布式优化等复杂系统理论,成本低、可扩展性强。
. 军事/安防广域监视
微型地面机器人集群可隐蔽部署于边境或敏感区域,通过协同探索实现大范围态势感知,BLDC 低噪声特性有助于隐蔽行动。
三、需要注意的事项
. 通信可靠性与冲突管理
.4 GHz 无线模块(如 nRF24L01)在多节点密集场景下易发生信道冲突或丢包。
对策:
采用 TDMA(时分多址)或 CSMA/CA 协议;
限制广播频率(如 ≤2 Hz);
引入 ACK 重传机制(需权衡延迟)。
. 定位与地图一致性难题
Arduino 缺乏 GNSS 或激光雷达,通常依赖航位推算(Dead Reckoning)或视觉标记(如 AprilTag),误差会随时间累积。
建议:
使用 IMU(如 MPU6050)辅助姿态估计;
引入相对定位(如 UWB 或红外测距)实现局部坐标对齐;
采用事件触发更新而非连续建图,降低计算负担。
. BLDC 驱动与电源协同设计
多机器人同时启动 BLDC 电机会造成瞬时电流浪涌,导致电压跌落、Arduino 复位。
必须:
每台机器人使用独立稳压电源(如 2S LiPo + 5V/3.3V LDO);
电机与控制电路共地隔离,加装滤波电容;
软件中加入软启动和电流限幅逻辑。
. 算法鲁棒性与故障容错
单个机器人失效不应导致群体瘫痪。
设计原则:
采用无标度网络(scale-free)通信拓扑;
决策逻辑具备冗余性(如多个邻居可提供相同信息);
加入"心跳包"检测离线节点,动态重分配任务。
. 物理尺寸与环境适应性
小型化设计虽利于部署,但牺牲了传感器视场角与越障能力。
平衡建议:
选用全向轮或麦克纳姆轮提升机动性;
传感器多角度布置(前、侧、下视);
外壳防护等级至少 IP40,适应非结构化地形。
1、多光感分区调速
cpp
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
// 定义OLED显示屏相关参数
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// 定义光敏电阻引脚
const int lightSensor1Pin = A0;
const int lightSensor2Pin = A1;
// 定义电机控制引脚
const int motorSpeedPin = 9;
void setup() {
// 初始化OLED显示屏
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println("SSD1306 allocation failed");
for (;;);
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.println("Light Speed Control");
display.display();
// 设置引脚模式
pinMode(lightSensor1Pin, INPUT);
pinMode(lightSensor2Pin, INPUT);
pinMode(motorSpeedPin, OUTPUT);
}
void loop() {
// 读取光敏电阻值
int lightValue1 = analogRead(lightSensor1Pin);
int lightValue2 = analogRead(lightSensor2Pin);
// 根据光敏电阻值计算速度
int speed = 0;
if (lightValue1 < 500 && lightValue2 < 500) {
speed = 0; // 低亮度区域,电机停止
} else if (lightValue1 >= 500 && lightValue2 < 500) {
speed = 128; // 中亮度区域1,中等速度
} else if (lightValue1 < 500 && lightValue2 >= 500) {
speed = 255; // 中亮度区域2,高速
} else {
speed = 64; // 高亮度区域,低速
}
// 输出速度到电机
analogWrite(motorSpeedPin, speed);
// 在OLED上显示当前速度和光照信息
display.clearDisplay();
display.setCursor(0, 0);
display.println("Light1: " + String(lightValue1));
display.println("Light2: " + String(lightValue2));
display.println("Speed: " + String(speed));
display.display();
delay(1000);
}要点解读
传感器布局与信息融合:在前、后、左、右等关键方向布置多个光敏传感器,获取光照强度的空间向量,构建对所处光环境的"地图"。
基于规则的决策与速度映射:通过Arduino运行决策状态机,根据预设规则将多路光感信息融合后输出BLDC电机的目标速度。
BLDC电机的精细化控制:采用FOC控制的BLDC电机实现平滑调速和快速响应,使机器人能自然稳定地适应环境变化。
2、模糊神经网络混合控制器
cpp
#include <AFMotor.h>
// 定义引脚及电机对象
AF_DCMotor motorX(1); // X轴方向的BLDC电机
AF_DCMotor motorY(2); // Y轴方向的BLDC电机
AF_DCMotor motorZ(3); // Z轴方向的BLDC电机
// 定义速度相关变量
int baseSpeed = 150; // 基础速度值
int speedVariation = 50; // 速度变化范围值
void setup() {
// 初始化电机设置
motorX.setSpeed(baseSpeed);
motorY.setSpeed(baseSpeed);
motorZ.setSpeed(baseSpeed);
}
void loop() {
for (int i = 0; i < 100; i++) {
// 随机微调各轴速度,模拟复杂工况下的速度协同变化
int xSpeed = baseSpeed + random(-speedVariation, speedVariation);
int ySpeed = baseSpeed + random(-speedVariation, speedVariation);
int zSpeed = baseSpeed / 2 + random(-speedVariation / 2, speedVariation / 2);
motorX.setSpeed(xSpeed);
motorY.setSpeed(ySpeed);
motorZ.setSpeed(zSpeed);
delay(100);
}
}要点解读
速度协同控制:通过循环不断调整三个电机的速度,以基础速度为基础在其上下随机波动,模拟复杂工作场景下不同轴之间根据任务需求进行的协同速度调整,实现多轴协同运动控制3。
3、多传感器融合的AGV小车避障系统
cpp
#define LEFT_MOTOR_PIN 5
#define RIGHT_MOTOR_PIN 6
#define FRONT_MOTOR_PIN 9
#define BACK_MOTOR_PIN 10
#define DISTANCE_SENSOR_PIN A0
void setup() {
pinMode(LEFT_MOTOR_PIN, OUTPUT);
pinMode(RIGHT_MOTOR_PIN, OUTPUT);
pinMode(FRONT_MOTOR_PIN, OUTPUT);
pinMode(BACK_MOTOR_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
int distance = analogRead(DISTANCE_SENSOR_PIN);
Serial.print("Distance: ");
Serial.println(distance);
if (distance < 200) {
stopMotors();
Serial.println("检测到障碍物,寻找路径!");
findPath();
} else {
moveForward(255);
}
}
void moveForward(int speed) {
analogWrite(LEFT_MOTOR_PIN, speed);
analogWrite(RIGHT_MOTOR_PIN, speed);
analogWrite(FRONT_MOTOR_PIN, speed);
analogWrite(BACK_MOTOR_PIN, speed);
}
void stopMotors() {
analogWrite(LEFT_MOTOR_PIN, 0);
analogWrite(RIGHT_MOTOR_PIN, 0);
analogWrite(FRONT_MOTOR_PIN, 0);
analogWrite(BACK_MOTOR_PIN, 0);
}
void findPath() {
moveBackward(255);
delay(500);
turnLeft(255);
delay(500);
moveForward(255);
}
void moveBackward(int speed) {
analogWrite(LEFT_MOTOR_PIN, 0);
analogWrite(RIGHT_MOTOR_PIN, 0);
analogWrite(FRONT_MOTOR_PIN, 0);
analogWrite(BACK_MOTOR_PIN, 0);
}
void turnLeft(int speed) {
analogWrite(LEFT_MOTOR_PIN, 0);
analogWrite(RIGHT_MOTOR_PIN, speed);
analogWrite(FRONT_MOTOR_PIN, speed);
analogWrite(BACK_MOTOR_PIN, 0);
}要点解读
碰撞检测与应对:利用距离传感器检测障碍物,设置阈值判断是否发生碰撞。一旦检测到障碍物,立即停止电机并执行后退、转向等操作。
多轴协同与路径规划:当检测到障碍物时,通过调用findPath()函数进行简单的路径规划,如后退、左转再前进等,以避开障碍物继续前行。

4、多机器人协作迷宫探索(基于SLAM与动态任务分配)
应用场景:
在未知迷宫环境中,多个机器人通过分布式SLAM构建全局地图,动态分配探索区域,避免重复路径,最终协同找到出口。
核心代码框架(简化版):
cpp
#include <SimpleFOC.h>
#include <ESP32CAN.h> // 用于机器人间通信
// 定义机器人ID与通信协议
#define ROBOT_ID 1
struct Task { int x, y; bool completed; };
Task currentTask;
// BLDC电机控制(FOC+编码器反馈)
BLDCMotor motor = BLDCMotor(7);
BLDCDriver3PWM driver = BLDCDriver3PWM(3, 5, 6, 11);
Encoder encoder = Encoder(2, 4);
void setup() {
Serial.begin(115200);
CAN.begin(CAN_500KBPS); // 初始化CAN总线
motor.linkDriver(&driver);
motor.linkEncoder(&encoder);
motor.initFOC();
motor.PID_velocity.P = 0.2;
}
void loop() {
// 1. 接收主控分配的任务(通过CAN总线)
if (CAN.read() == ROBOT_ID) {
currentTask = parseTask(CAN.packetData());
}
// 2. 执行SLAM导航(伪代码,实际需集成激光雷达/IMU)
if (!currentTask.completed) {
navigateTo(currentTask.x, currentTask.y); // 调用路径规划函数
if (atGoal()) currentTask.completed = true;
}
// 3. 更新地图并广播状态
updateMap(); // 融合激光雷达与里程计数据
broadcastStatus(); // 发送当前位置与任务状态
}
// 关键函数:动态避障与速度控制
void navigateTo(int x, int y) {
int dx = x - currentPos.x, dy = y - currentPos.y;
float targetSpeed = sqrt(dx*dx + dy*dy) * 0.5; // 比例控制
motor.target = targetSpeed;
motor.loopFOC();
}要点解读:
分布式架构:通过CAN总线实现机器人间通信,主控分配任务,从机执行并反馈状态,避免单点故障。
SLAM集成:需外接激光雷达(如RPLIDAR A1)与IMU(如MPU6050),使用轻量级算法(如Hector SLAM)降低计算负载。
动态避障:结合超声波传感器实时检测障碍物,触发紧急停止或重新规划路径。
FOC控制:确保电机低速平稳运行,减少迷宫窄通道中的抖动。
5、多关节协作搬运机器人(基于力控与柔顺控制)
应用场景:
在工业装配线上,多个机器人通过柔顺控制协同搬运重型物体,适应不同重量与形状,避免碰撞损坏。
核心代码框架(简化版):
cpp
#include <SimpleFOC.h>
#include <ForceSensor.h> // 假设的力传感器库
// 定义关节电机与力传感器
BLDCMotor jointMotor = BLDCMotor(7);
BLDCDriver3PWM driver = BLDCDriver3PWM(3, 5, 6, 11);
Encoder encoder = Encoder(2, 4);
ForceSensor forceSensor = ForceSensor(A0); // 模拟输入接口
void setup() {
jointMotor.linkDriver(&driver);
jointMotor.linkEncoder(&encoder);
jointMotor.initFOC();
jointMotor.PID_torque.P = 0.5; // 力矩环PID
}
void loop() {
// 1. 读取目标力矩(来自上位机或预设值)
float targetTorque = getTargetTorque(); // 例如:搬运10kg物体需5Nm
// 2. 实时力控(结合传感器反馈)
float actualTorque = forceSensor.read() * Kt; // Kt为电机扭矩常数
float error = targetTorque - actualTorque;
jointMotor.torque = jointMotor.PID_torque.calculate(error);
// 3. 柔顺控制(遇障碍自动退让)
if (abs(error) > THRESHOLD) { // 阈值设为2Nm
jointMotor.torque = 0; // 停止并后退
delay(500);
}
jointMotor.loopFOC();
}要点解读:
力/力矩传感器:需高精度(如ATI Mini45六维力传感器)或低成本替代方案(如应变片+ADC)。
柔顺控制算法:通过阻抗控制或导纳控制实现"推即动、松即停",提升人机协作安全性。
FOC与扭矩观测:直接测量电流估算扭矩(需电机参数标定),或使用观测器算法降低硬件成本。
多关节协同:主控通过逆运动学解算各关节目标力矩,下位机(Arduino)执行底层力控。
6、群体无人机协同搜索(基于PID速度控制与编队飞行)
应用场景:
在灾害救援中,多架无人机通过编队飞行覆盖大面积区域,协同搜索幸存者或目标物体。
核心代码框架(简化版):
cpp
#include <SimpleFOC.h>
#include <ESP32WiFi.h> // 用于无人机间通信
// 定义无人机ID与编队参数
#define DRONE_ID 2
struct Formation { float x, y, z; float speed; };
Formation currentFormation;
// BLDC电机控制(四旋翼需4个电机)
BLDCMotor motors[4];
BLDCDriver3PWM drivers[4];
Encoder encoders[4];
void setup() {
WiFi.begin("DroneSwarm"); // 加入无人机群网络
for (int i = 0; i < 4; i++) {
motors[i].linkDriver(&drivers[i]);
motors[i].linkEncoder(&encoders[i]);
motors[i].initFOC();
motors[i].PID_velocity.P = 0.1;
}
}
void loop() {
// 1. 接收编队指令(通过WiFi)
if (WiFi.available()) {
currentFormation = parseFormation(WiFi.read());
}
// 2. 速度同步控制(保持编队队形)
float targetSpeed = currentFormation.speed;
for (int i = 0; i < 4; i++) {
motors[i].target = targetSpeed; // 简化模型,实际需考虑姿态控制
motors[i].loopFOC();
}
// 3. 避障与紧急停止
if (detectObstacle()) {
for (int i = 0; i < 4; i++) motors[i].target = 0;
}
}要点解读:
编队控制算法:使用领航-跟随法或虚拟结构法,通过PID速度控制保持无人机间相对位置。
通信协议:采用WiFi或LoRa实现低延迟通信,确保指令同步。
姿态稳定:需集成IMU(如MPU9250)与PID姿态控制,补偿风扰等外部干扰。
电源管理:高容量锂电池与低功耗设计,延长续航时间。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。
