目录
[3.1 向下采样( pyrDown ):从高分辨率到低分辨率](#3.1 向下采样( pyrDown ):从高分辨率到低分辨率)
[3)OpenCV 实战代码](#3)OpenCV 实战代码)
[3.2 向上采样( pyrUp ):从低分辨率到高分辨率](#3.2 向上采样( pyrUp ):从低分辨率到高分辨率)
[3)OpenCV 实战代码(衔接上采样代码)](#3)OpenCV 实战代码(衔接上采样代码))
[4.1 拉普拉斯金字塔的定义](#4.1 拉普拉斯金字塔的定义)
[4.2 拉普拉斯金字塔的核心作用](#4.2 拉普拉斯金字塔的核心作用)
[4.3 OpenCV 实战代码(衔接前文代码)](#4.3 OpenCV 实战代码(衔接前文代码))
[4.4 运行结果分析](#4.4 运行结果分析)
[5.1 核心知识点回顾](#5.1 核心知识点回顾)
[5.2 实际应用场景](#5.2 实际应用场景)
[5.3 常见问题与解决方案](#5.3 常见问题与解决方案)
在计算机视觉领域,图像金字塔是处理多尺度图像问题的核心技术之一。无论是目标检测、图像融合还是图像重建,都离不开图像金字塔的支持。本文将从基础概念出发,结合 OpenCV 实战代码,详细讲解图像金字塔的原理、上下采样操作以及拉普拉斯金字塔的构建与应用,帮助大家彻底掌握这一关键技术。
一、什么是图像金字塔?
图像金字塔并非传统意义上的 "金字塔" 结构,而是由同一图像的多个不同分辨率子图构成的集合。其核心特征是:
- 底部为原始高分辨率图像,包含最丰富的细节信息;
- 向上每一层图像的分辨率都逐步降低(通常宽高各缩小为上一层的 1/2);
- 顶部为低分辨率图像,仅保留图像的整体轮廓信息。
可以形象地理解为:将原始图像不断 "缩小" 并堆叠,形成类似金字塔的形态,因此得名 "图像金字塔"。
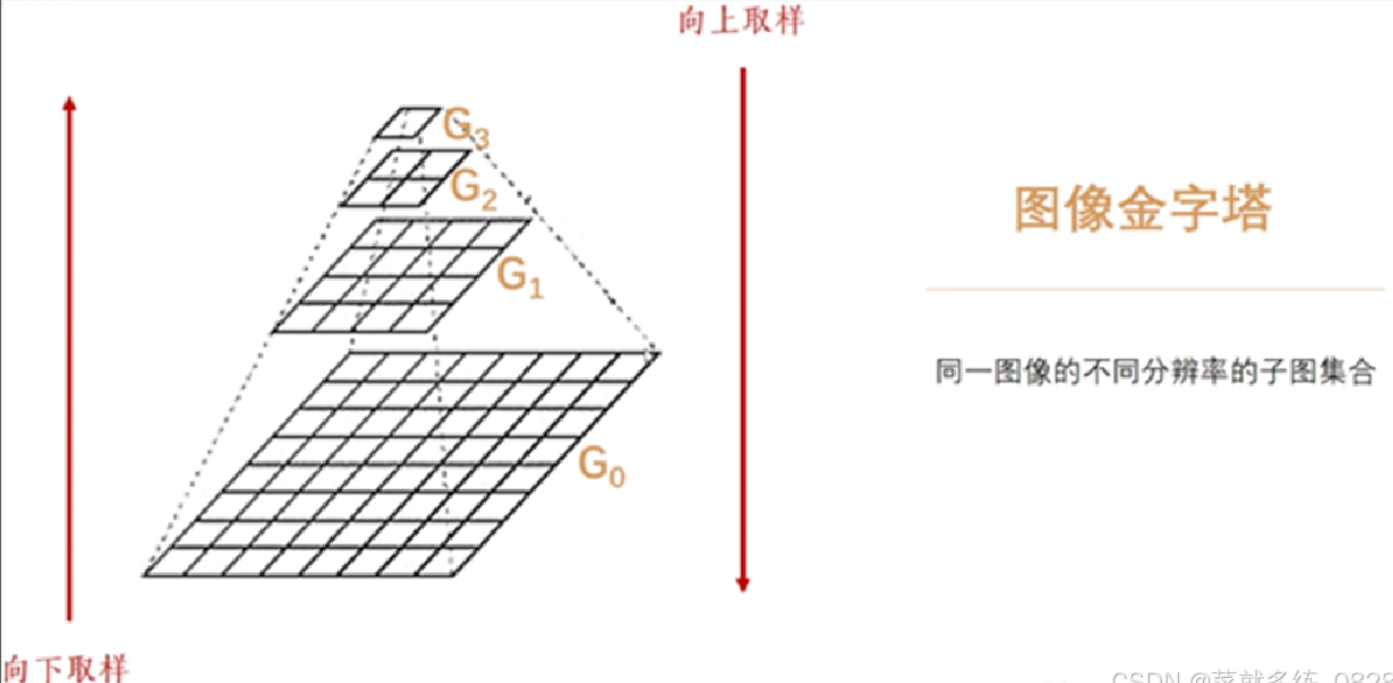
( 示意图:从下到上分辨率逐步降低,细节信息逐渐减少)
二、图像金字塔的核心作用
图像金字塔的价值在于提供多尺度的图像信息,解决单分辨率图像难以应对的复杂场景。其主要应用场景包括:
-
多尺度目标检测
现实场景中目标大小不一(如远处的人很小,近处的人很大),通过在不同分辨率的金字塔层中检测目标,可提高检测的准确率和鲁棒性(例如 OpenCV 的 Haar 级联检测就依赖金字塔)。
-
图像融合与拼接
在全景图拼接或多曝光图像融合时,金字塔能提供多尺度细节,避免直接拼接产生的 "拼接缝",让融合结果更自然。
-
图像增强与去噪
不同尺度的金字塔层包含不同频率的信息(底层高频细节、顶层低频轮廓),可针对性处理:在顶层去噪(保留轮廓),在底层增强细节。
-
图像压缩与编码
金字塔顶层的低分辨率图像数据量小,可作为压缩的基础;结合细节信息(如拉普拉斯金字塔),能在高压缩比下保留关键信息。
三、图像金字塔的核心操作:上下采样
图像金字塔的构建依赖两种基本操作:向下采样 (构建高斯金字塔)和向上采样(恢复分辨率)。这两种操作是理解所有金字塔应用的基础。
3.1 向下采样( pyrDown ):从高分辨率到低分辨率
1)原理与步骤
向下采样是构建高斯金字塔的核心操作,目标是降低图像分辨率,每向上一层,图像宽高各缩小为原来的 1/2(面积缩小为 1/4)。具体步骤:
- 高斯滤波:用 5×5 的高斯核对原始图像进行滤波,目的是去除高频噪声(避免下采样时产生 "混叠" 失真);
- 删除偶数行列:直接删除滤波后图像的所有偶数行和偶数列,保留奇数行和奇数列,实现尺寸缩小。

2)关键注意事项
- 向下采样会丢失图像细节(因为删除了 50% 的像素),且丢失的信息无法通过后续操作完全恢复;
- 输入图像的宽高必须为偶数!若为奇数,下采样时会因无法整除导致尺寸错误(OpenCV 虽不会报错,但会自动截断,影响结果)。
3)OpenCV 实战代码
python
import cv2
import numpy as np
# 1. 读取图像(以灰度图为例,彩色图处理逻辑一致)
img = cv2.imread("face.jpg", cv2.IMREAD_GRAYSCALE)
if img is None:
print("图像读取失败,请检查文件路径!")
exit()
# 2. 展示原始图像
cv2.imshow("原始图像 (640x480)", img)
print(f"原始图像尺寸: {img.shape}") # 输出:(480, 640)(高×宽)
cv2.waitKey(0)
# 3. 第一次向下采样(宽高变为 320x240)
img_down1 = cv2.pyrDown(img)
cv2.imshow("第一次下采样 (320x240)", img_down1)
print(f"第一次下采样尺寸: {img_down1.shape}") # 输出:(240, 320)
cv2.waitKey(0)
# 4. 第二次向下采样(宽高变为 160x120)
img_down2 = cv2.pyrDown(img_down1)
cv2.imshow("第二次下采样 (160x120)", img_down2)
print(f"第二次下采样尺寸: {img_down2.shape}") # 输出:(120, 160)
cv2.waitKey(0)
# 关闭所有窗口
cv2.destroyAllWindows()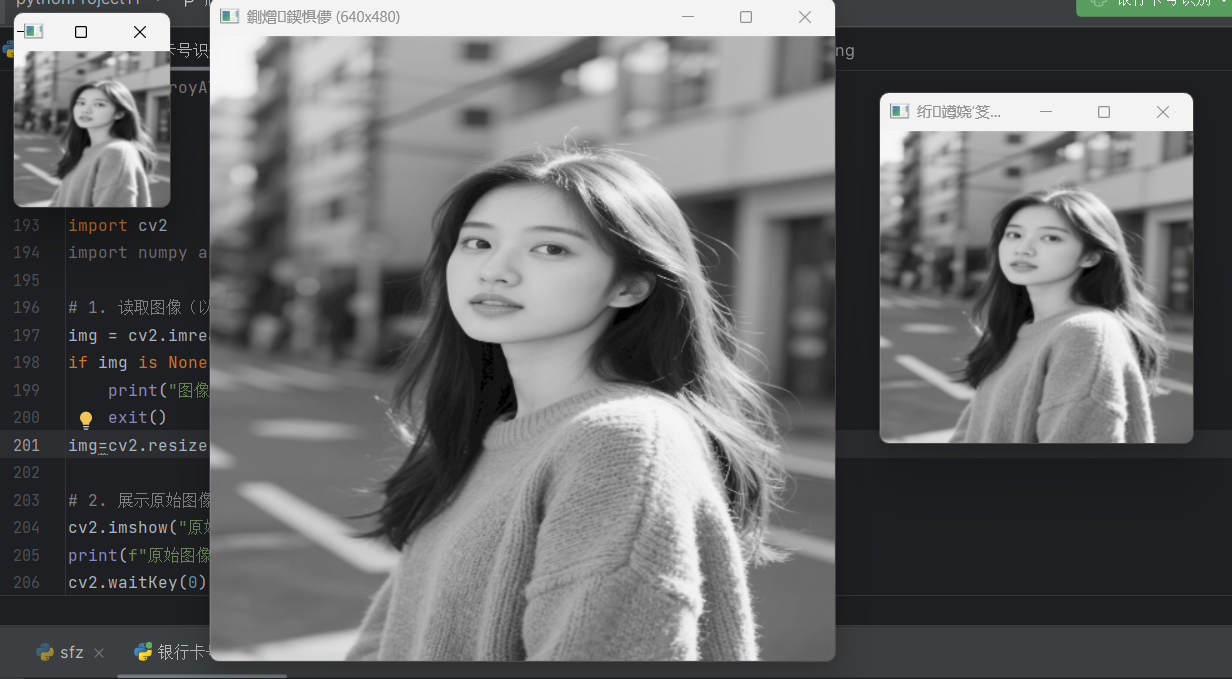
4)运行结果分析
- 原始图像(640×480)→ 第一次下采样(320×240):细节略有减少,但轮廓清晰;
- 第二次下采样(160×120):细节进一步丢失,图像更模糊,但整体轮廓仍可识别;
- 尺寸变化严格遵循 "宽高各缩小 1/2" 的规律。
3.2 向上采样( pyrUp ):从低分辨率到高分辨率
1)原理与步骤
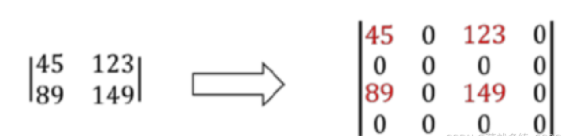
向上采样是向下采样的逆操作,目标是恢复图像分辨率,每向上一层,图像宽高各扩大为原来的 2 倍(面积扩大为 4 倍)。具体步骤:
- 插值补点:在原始图像的每个像素之间插入新的像素(通常用双线性插值),使宽高变为原来的 2 倍(新像素值由周围像素计算得出);
- 高斯滤波:用 5×5 的高斯核对插值后的图像进行滤波,平滑图像(因为插值会引入 "块状" 失真)。
2)关键注意事项
- 向上采样虽然扩大了图像尺寸,但无法恢复向下采样时丢失的细节(插值的新像素是 "估算" 的,不是原始像素);
- 向下采样 + 向上采样 ≠ 原始图像(会导致图像模糊)。
3)OpenCV 实战代码(衔接上采样代码)
python
# 1. 对原始图像进行向上采样(宽高变为 1280x960)
img_up1 = cv2.pyrUp(img)
cv2.imshow("原始图像上采样 (1280x960)", img_up1)
print(f"原始图像上采样尺寸: {img_up1.shape}") # 输出:(960, 1280)
cv2.waitKey(0)
# 2. 对下采样后的图像进行向上采样(验证"不可逆性")
# 对 img_down1(320x240)上采样 → 640x480(与原始图像尺寸相同)
img_down1_up = cv2.pyrUp(img_down1)
cv2.imshow("img_down1 上采样 (640x480)", img_down1_up)
print(f"img_down1 上采样尺寸: {img_down1_up.shape}") # 输出:(480, 640)
# 对 img_down2(160x120)上采样 → 320x240
img_down2_up = cv2.pyrUp(img_down2)
cv2.imshow("img_down2 上采样 (320x240)", img_down2_up)
print(f"img_down2 上采样尺寸: {img_down2_up.shape}") # 输出:(240, 320)
cv2.waitKey(0)
# 3. 对比原始图像与"下采样+上采样"图像(直观感受模糊)
cv2.imshow("原始图像", img)
cv2.imshow("img_down1 → 上采样", img_down1_up)
cv2.waitKey(0)
cv2.destroyAllWindows()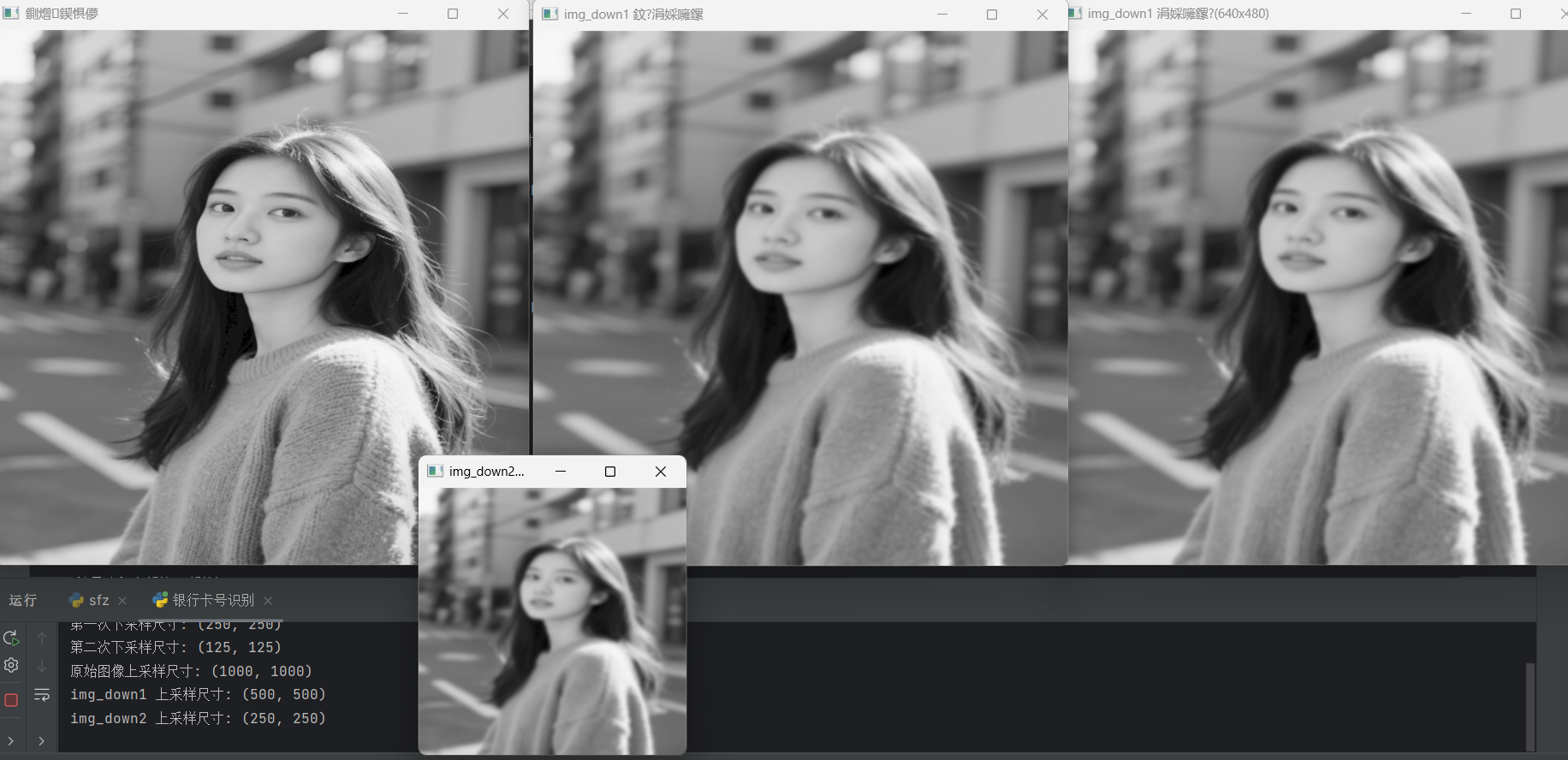
4)运行结果分析
- 原始图像上采样(1280×960):尺寸扩大,但细节未增加(因为是插值生成);
img_down1 上采样(640×480):尺寸与原始图像相同,但明显更模糊(丢失的细节无法恢复);- 下采样次数越多,再上采样后的图像越模糊(丢失的细节更多)。
4.1 拉普拉斯金字塔的定义
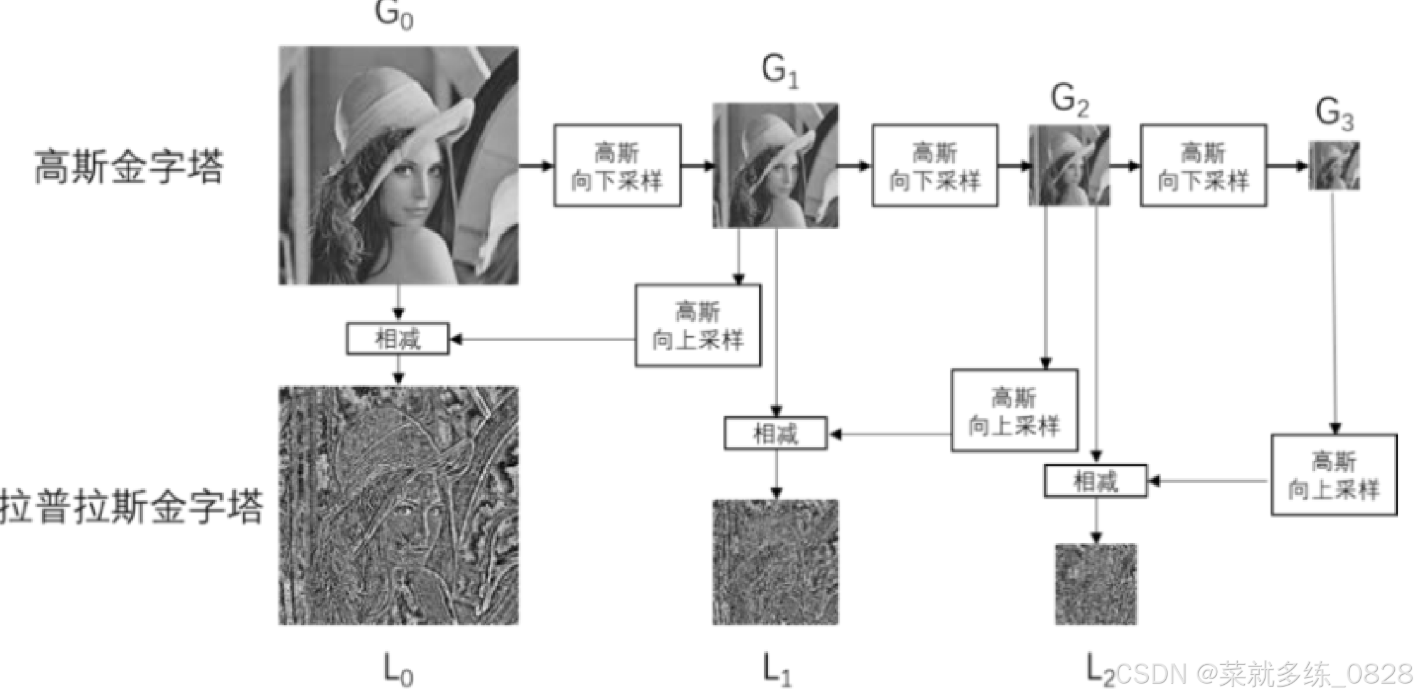
拉普拉斯金字塔(Laplacian Pyramid)的每一层 Li,定义为高斯金字塔第 i 层 Gi 与 "第 i+1 层上采样后图像" 的差值 ,公式如下:
Li = Gi - pyrUp(pyrDown(Gi))
Gi:高斯金字塔第 i 层(高分辨率图像);pyrDown(Gi):对Gi下采样得到的低分辨率图像(Gi+1);pyrUp(pyrDown(Gi)):对Gi+1上采样得到的图像(尺寸与Gi相同,但模糊);Li:拉普拉斯金字塔第 i 层,记录了Gi比Gi+1多出来的细节(高频信息)。
4.2 拉普拉斯金字塔的核心作用
- 图像重建:通过 "低分辨率图像 + 拉普拉斯细节",可恢复更高分辨率的图像;
- 细节提取:拉普拉斯层包含图像的边缘、纹理等高频细节,可用于图像增强、修复。
4.3 OpenCV 实战代码(衔接前文代码)
python
# 1. 构建拉普拉斯金字塔(基于之前的高斯金字塔图像)
# L0 = 原始图像 - (原始图像下采样后上采样的图像)
L0 = img - img_down1_up # 记录原始图像比 img_down1 多的细节
# L1 = img_down1 - (img_down1 下采样后上采样的图像)
L1 = img_down1 - img_down2_up # 记录 img_down1 比 img_down2 多的细节
# 2. 展示拉普拉斯层(细节信息)
# 拉普拉斯层像素值可能为负,需归一化到0-255才能正常显示
L0_norm = cv2.normalize(L0, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
L1_norm = cv2.normalize(L1, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
cv2.imshow("拉普拉斯层 L0(原始图像细节)", L0_norm)
cv2.imshow("拉普拉斯层 L1(img_down1 细节)", L1_norm)
cv2.waitKey(0)
# 3. 利用拉普拉斯层重建图像(验证细节的作用)
# 重建公式:Gi = pyrUp(Gi+1) + Li
reconstructed_img = img_down1_up + L0 # 用 img_down1_up + L0 重建原始图像
# 归一化重建图像(避免像素值溢出)
reconstructed_img = cv2.normalize(reconstructed_img, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
# 对比原始图像与重建图像
cv2.imshow("原始图像", img)
cv2.imshow("拉普拉斯重建图像", reconstructed_img)
cv2.waitKey(0)
cv2.destroyAllWindows()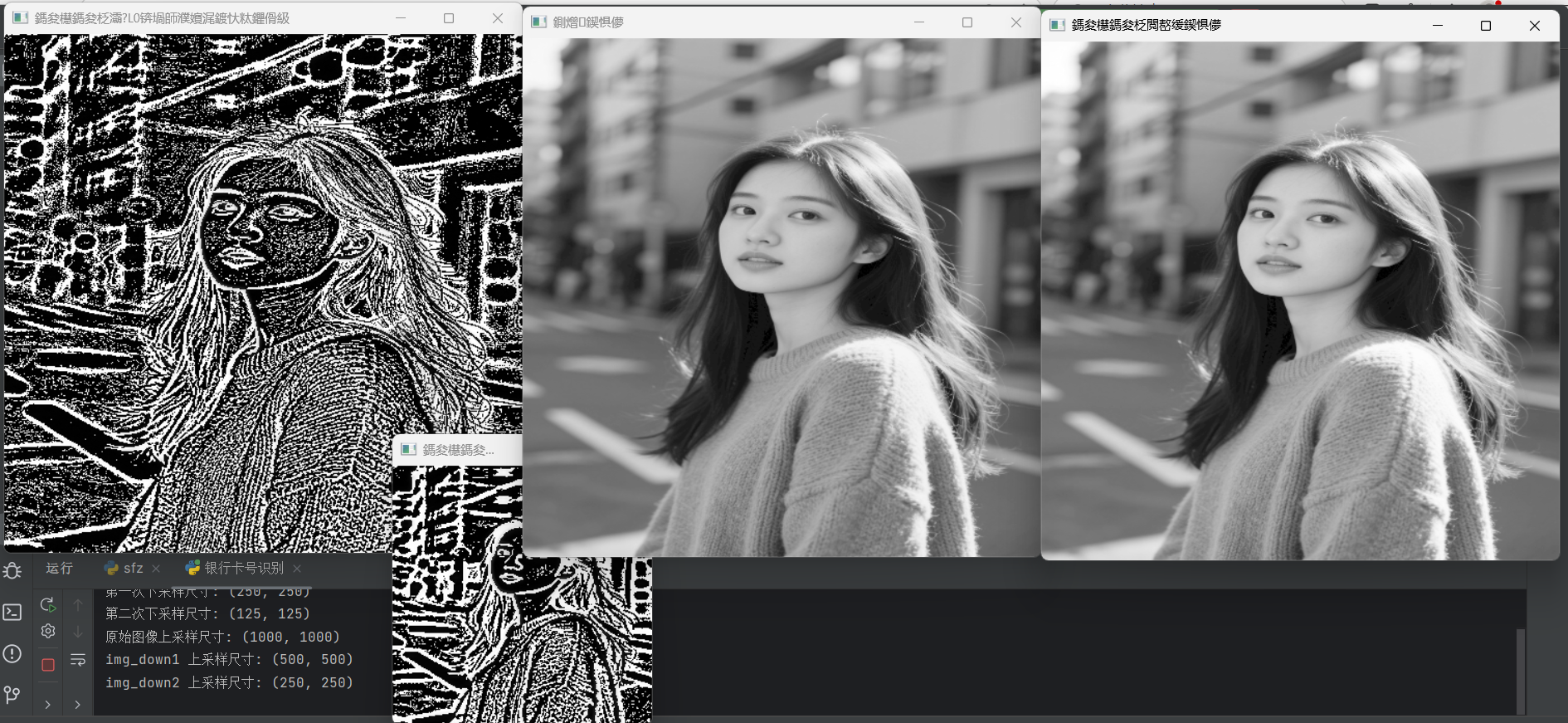
4.4 运行结果分析
-
拉普拉斯层显示:
L0_norm:主要显示原始图像的边缘、纹理等细节(如人脸的轮廓、眼睛、嘴巴边缘);L1_norm:显示img_down1的细节(相对模糊,因为img_down1本身分辨率较低)。
-
图像重建效果:
- 重建图像与原始图像几乎一致(细微差异来自数值归一化);
- 若没有
L0细节,img_down1_up是模糊的;加上L0后,细节被 "补回",图像清晰度大幅提升。
五、总结与应用拓展
5.1 核心知识点回顾

5.2 实际应用场景
- 多尺度目标检测:在高斯金字塔的不同层检测不同大小的目标(小目标在底层,大目标在顶层);
- 图像融合:用拉普拉斯金字塔融合不同图像的细节(如将清晰的前景与自然的背景融合);
- 图像压缩:用高斯金字塔顶层的低分辨率图像存储基础信息,拉普拉斯层存储细节,减少数据量;
- 图像修复:用拉普拉斯层的细节信息修复图像中的瑕疵(如去除水印、修复划痕)。
5.3 常见问题与解决方案
- 下采样时尺寸报错 :确保输入图像宽高为偶数,可通过
cv2.resize()预处理调整尺寸; - 拉普拉斯层显示异常 :像素值可能为负,需用
cv2.normalize()归一化到 0-255; - 重建图像模糊:若拉普拉斯层细节不足(如下采样次数过多),需减少下采样层级或优化插值方式。
通过本文的讲解,相信大家已经掌握了图像金字塔的核心原理与实现方法。建议结合实际图像反复调试代码,感受不同参数(如高斯核大小、阈值)对结果的影响,为后续更复杂的计算机视觉项目打下基础!