USB本身所属设备驱动的结构与其挂不挂在USB总线上没什么关系,但是据此在访问方式上却有 很大的变化,例如,对于USB接口的字符设备而言,尽管仍然是write()、read()、ioctl()这些函数,但是在这些函数中,贯穿始终的是称为URB的USB请求块。
一、USB请求块
1.urb结构体
USB请求块(USB Request Block,URB)是USB设备驱动中用来描述与USB设备通信所用的基本载体 和核心数据结构。
struct urb {
...
/* public: documented fields in the urb that can be used by drivers */
struct list_head urb_list; /* list head for use by the urb's
* current owner */
...
struct usb_host_endpoint *ep; /* (internal) pointer to endpoint */
unsigned int pipe; /* (in) pipe information */
unsigned int stream_id; /* (in) stream ID */
int status; /* (return) non-ISO status */
unsigned int transfer_flags; /* (in) URB_SHORT_NOT_OK | ...*/
void *transfer_buffer; /* (in) associated data buffer */
dma_addr_t transfer_dma; /* (in) dma addr for transfer_buffer */
struct scatterlist *sg; /* (in) scatter gather buffer list */
int num_mapped_sgs; /* (internal) mapped sg entries */
int num_sgs; /* (in) number of entries in the sg list */
u32 transfer_buffer_length; /* (in) data buffer length */
u32 actual_length; /* (return) actual transfer length */
unsigned char *setup_packet; /* (in) setup packet (control only) */
dma_addr_t setup_dma; /* (in) dma addr for setup_packet */
int start_frame; /* (modify) start frame (ISO) */
int number_of_packets; /* (in) number of ISO packets */
int interval; /* (modify) transfer interval * (INT/ISO) */
int error_count; /* (return) number of ISO errors */
void *context; /* (in) context for completion */
usb_complete_t complete; /* (in) completion routine */
struct usb_iso_packet_descriptor iso_frame_desc[0]; /* (in) ISO ONLY */
};2.URB处理流程
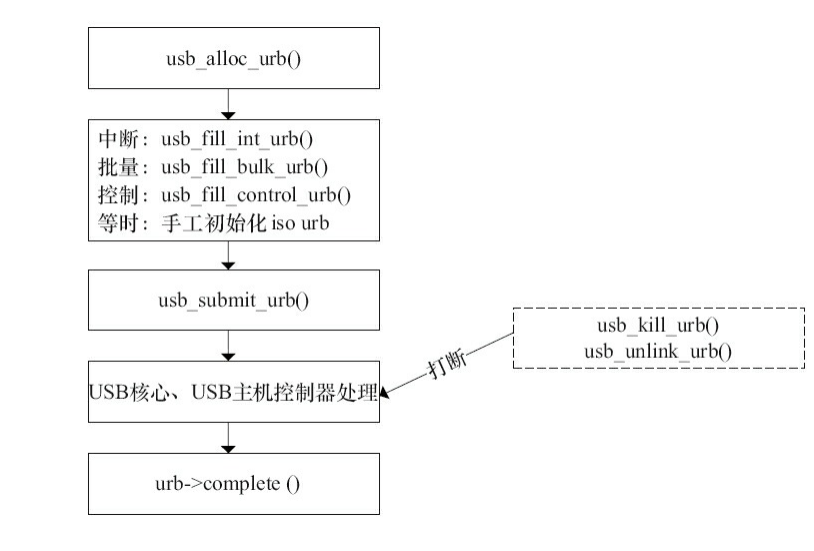
USB设备中的每个端点都处理一个URB队列,在队列被清空之前,一个URB的典型生命周期如下:
1)被一个USB设备驱动创建。
创建URB结构体的函数为:
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags);iso_packets 是这个URB应当包含的等时数据包的数目,若为0表示不创建等时数据包。mem_flags 参数 是分配内存的标志,和**kmalloc()**函数的分配标志参数含义相同。如果分配成功,该函数返回一个URB 结构体指针,否则返回0。
URB结构体在驱动中不宜静态创建,因为这可能破坏USB核心给URB使用的引用计数方法。
usb_alloc_urb()的"反函数"为:
void usb_free_urb(struct urb *urb);该函数用于释放由usb_alloc_urb()分配的URB结构体。
2)初始化,被安排给一个特定USB设备的特定端点。
对于中断URB,使用usb_fill_int_urb()函数来初始化URB,如下所示:
void usb_fill_int_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete,
void *context,
int interval);URB参数指向要被初始化的URB的指针;dev指向这个URB要被发送到的USB设备;pipe是这个URB 要被发送到的USB设备的特定端点;transfer_buffer是指向发送数据或接收数据的缓冲区的指针,和URB一 样,它也不能是静态缓冲区,必须使用kmalloc()来分配;buffer_length是transfer_buffer指针所指向缓冲 区的大小;complete指针指向当这个URB完成时被调用的完成处理函数;context是完成处理函数的"上下 文" ;interval是这个URB应当被调度的间隔。 上述函数参数中的pipe使用usb_sndintpipe()或usb_rcvintpipe()创建。
对于批量URB,使用usb_fill_bulk_urb()函数来初始化,如下所示:
void usb_fill_bulk_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete,
void *context);除了没有对应于调度间隔的interval参数以外,该函数的参数和usb_fill_int_urb()函数的参数含义相同。
上述函数参数中的pipe使用usb_sndbulkpipe()或者usb_rcvbulkpipe()函数来创建。
对于控制URB,使用usb_fill_control_urb()函数来初始化,如下所示:
void usb_fill_control_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
unsigned char *setup_packet,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete,
void *context);除了增加了新的setup_packet参数以外,该函数的参数和usb_fill_bulk_urb()函数的参数含义相同。
setup_packet参数指向即将被发送到端点的设置数据包。
上述函数参数中的pipe使用usb_sndctrlpipe()或usb_rcvictrlpipe()函数来创建。
等时URB没有像中断、控制和批量URB的初始化函数usb_fill_iso_urb(),我们只能手动对它初始 化,而后才能提交给USB核心。下面给出了初始化等时URB的例子,它来自 drivers/media/usb/uvc/uvc_video.c文件。
for (i = 0; i < UVC_URBS; ++i) {
urb = usb_alloc_urb(npackets, gfp_flags);
if (urb == NULL) {
uvc_uninit_video(stream, 1);
return -ENOMEM;
}
urb->dev = stream->dev->udev;
urb->context = stream;
urb->pipe = usb_rcvisocpipe(stream->dev->udev,
ep->desc.bEndpointAddress);
#ifndef CONfiG_DMA_NONCOHERENT
urb->transfer_flags = URB_ISO_ASAP | URB_NO_TRANSFER_DMA_MAP;
urb->transfer_dma = stream->urb_dma[i];
#else
urb->transfer_flags = URB_ISO_ASAP;
#endif
urb->interval = ep->desc.bInterval;
urb->transfer_buffer = stream->urb_buffer[i];
urb->complete = uvc_video_complete;
urb->number_of_packets = npackets;
urb->transfer_buffer_length = size;
for (j = 0; j < npackets; ++j) {
urb->iso_frame_desc[j].offset = j * psize;
urb->iso_frame_desc[j].length = psize;
}
stream->urb[i] = urb;
}3)被USB设备驱动提交给USB核心
在完成第1)、2)步的创建和初始化URB后,URB便可以提交给USB核心了,可通过 usb_submit_urb()函数来完成
int usb_submit_urb(struct urb *urb, gfp_t mem_flags);URB参数是指向URB的指针,mem_flags参数与传递给kmalloc()函数参数的意义相同,它用于告知 USB核心如何在此时分配内存缓冲区。
在提交URB到USB核心后,直到完成函数被调用之前,不要访问URB中的任何成员。
usb_submit_urb()在原子上下文和进程上下文中都可以被调用,mem_flags变量需根据调用环境进行 相应的设置,如下所示。
·GFP_ATOMIC:在中断处理函数、底半部、tasklet、定时器处理函数以及URB完成函数中,在调用 者持有自旋锁或者读写锁时以及当驱动将current->state修改为非TASK_RUNNING时,应使用此标志。
·GFP_NOIO:在存储设备的块I/O和错误处理路径中,应使用此标志;
·GFP_KERNEL:如果没有任何理由使用GFP_ATOMIC和GFP_NOIO,就使用GFP_KERNEL。 如果usb_submit_urb()调用成功,即URB的控制权被移交给USB核心,该函数返回0;否则,返回错 误号
4)提交由USB核心指定的USB主机控制器驱动。
5)被USB主机控制器处理,进行一次到USB设备的传送。
第4)~5)步由USB核心和主机控制器完成,不受USB设备驱动的控制。
6)当URB完成,USB主机控制器驱动通知USB设备驱动。
在如下3种情况下,URB将结束,URB完成回调函数将被调用(完成回调是通过usb_fill_xxx_urb的参数传入的)。
在完成回调中,我们通常要进行urb->status的判断。 ·URB被成功发送给设备,并且设备返回正确的确认。如果urb->status为0,意味着对于一个输出 URB,数据被成功发送;对于一个输入URB,请求的数据被成功收到。 ·
如果发送数据到设备或从设备接收数据时发生了错误,urb->status将记录错误值。 ·URB被从USB核心"去除连接" ,这发生在驱动通过usb_unlink_urb()或usb_kill_urb()函数取消或 URB虽已提交而USB设备被拔出的情况下。
usb_unlink_urb()和usb_kill_urb()这两个函数用于取消已提交的URB,其参数为要被取消的URB 指针。usb_unlink_urb()是异步的,搞定后对应的完成回调会被调用;而usb_kill_urb()会彻底终止 URB的生命周期并等待这一行为,它通常在设备的disconnect()函数中被调用。
当URB生命结束时(处理完成或被解除链接),在URB的完成回调中通过URB结构体的status成员可以获知其原因,如0表示传输成功,-ENOENT表示被usb_kill_urb()杀死,-ECONNRESET 表示被 usb_unlink_urb()杀死,-EPROTO表示传输中发生了bitstuff错误或者硬件未能及时收到响应数据包,-ENODEV表示USB设备已被移除,-EXDEV表示等时传输仅完成了一部分等。
给出了一个URB的完整处理流程,虚线框的 usb_unlink_urb()和usb_kill_urb()并不一定会发生,它们只是在URB正在被USB核心和主机控制器处理时又被驱动程序取消的情况下才发生。
3.简单的批量与控制URB
有时USB驱动程序只是从USB设备上接收或向USB设备发送一些简单的数据,这时候,没有必要将 URB创建、初始化、提交、完成处理的整个流程走一遍,而可以使用两个更简单的函数,如下所示。
(1)usb_bulk_msg()
usb_bulk_msg()函数创建一个USB批量URB并将它发送到特定设备,这个函数是同步的,它一直等 待URB完成后才返回。usb_bulk_msg()函数的原型为:
int usb_bulk_msg(struct usb_device *usb_dev,
unsigned int pipe,
void *data, int len,
int *actual_length,
int timeout);usb_dev参数为批量消息要发送的USB设备的指针,pipe为批量消息要发送到的USB设备的端点,data 参数为指向要发送或接收的数据缓冲区的指针,len参数为data参数所指向的缓冲区的长度,actual_length 用于返回实际发送或接收的字节数,timeout是发送超时,以jiffies为单位,0意味着永远等待。
如果函数调用成功,返回0;否则,返回1个负的错误值。
(2)usb_control_msg()函数
dev指向控制消息发往的USB设备,pipe是控制消息要发往的USB设备的端点,request是这个控制消息 的USB请求值,requesttype是这个控制消息的USB请求类型,value是这个控制消息的USB消息值,index是这个控制消息的USB消息索引值,data指向要发送或接收的数据缓冲区,size是data参数所指向的缓冲区的大小,timeout是发送超时,以毫秒为单位,0意味着永远等待。
参数request、requesttype、value和index与USB规范中定义的USB控制消息直接对应。 如果函数调用成功,该函数返回发送到设备或从设备接收到的字节数;否则,返回一个负的错误值。
对usb_bulk_msg()和usb_control_msg()函数的使用要特别慎重,由于它们是同步的,因此不能在中断上下文和持有自旋锁的情况下使用。而且,该函数也不能被任何其他函数取消,因此,务必要使得驱动程序的disconnect()函数掌握足够的信息,以判断和等待该调用的结束。
===========================================
USB程序的字符设备文件操作结构体
static const struct file_operations skel_fops = {
.owner = THIS_MODULE,
.read = skel_read,
.write = skel_write,
.open = skel_open,
.release = skel_release,
.flush = skel_flush,
.llseek = noop_llseek,
};在skel_write()函数中进行的关于URB的操作与前面的描述完全对应,即进行了URB的分配 (调用usb_alloc_urb())、初始化 (调用usb_fill_bulk_urb())和提交(调用usb_submit_urb())的 操作
static ssize_t skel_write(struct file *file, const char *user_buffer,
size_t count, loff_t *ppos)
{
struct usb_skel *dev;
int retval = 0;
struct urb *urb = NULL;
char *buf = NULL;
size_t writesize = min(count, (size_t)MAX_TRANSFER);
dev = file->private_data;
...
spin_lock_irq(&dev->err_lock);
retval = dev->errors;
...
spin_unlock_irq(&dev->err_lock);
...
/* create a urb, and a buffer for it, and copy the data to the urb */
urb = usb_alloc_urb(0, GFP_KERNEL);
...
buf = usb_alloc_coherent(dev->udev, writesize, GFP_KERNEL,&urb->transfer_dma);
...
if (copy_from_user(buf, user_buffer, writesize)) {
retval = -EFAULT;28 goto error;
}
/* this lock makes sure we don't submit URBs to gone devices */
mutex_lock(&dev->io_mutex);
...
/* initialize the urb properly */
usb_fill_bulk_urb(urb, dev->udev,
usb_sndbulkpipe(dev->udev, dev->bulk_out_endpointAddr),
buf, writesize, skel_write_bulk_callback, dev);
urb->transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
usb_anchor_urb(urb, &dev->submitted);
/* send the data out the bulk port */
retval = usb_submit_urb(urb, GFP_KERNEL);
mutex_unlock(&dev->io_mutex);
...
usb_free_urb(urb);
return writesize;
...
}在写函数中发起的URB结束后,填入的完成函数skel_write_bulk_callback()将被调用,它会 进行urb->status的判断
static void skel_write_bulk_callback(struct urb *urb)
{
struct usb_skel *dev;
dev = urb->context;
/* sync/async unlink faults aren't errors */
if (urb->status) {
if (!(urb->status == -ENOENT ||
urb->status == -ECONNRESET ||
urb->status == -ESHUTDOWN))
dev_err(&dev->interface->dev,
"%s - nonzero write bulk status received: %d\n",__func__, urb->status);
spin_lock(&dev->err_lock);
dev->errors = urb->status;
spin_unlock(&dev->err_lock);
}
/* free up our allocated buffer */
usb_free_coherent(urb->dev, urb->transfer_buffer_length,
urb->transfer_buffer, urb->transfer_dma);
up(&dev->limit_sem);
}