FlashAttention(V2)深度解析:从原理到工程实现
引言
随着大模型参数规模的不断扩大和序列长度的增长,注意力机制的计算复杂度成为训练和推理的主要瓶颈。Flash Attention通过巧妙的内存管理和计算重排,在不改变数学语义的前提下大幅提升了注意力计算的效率。在Flash Attention V1的基础上,V2版本通过调整循环结构和优化并行策略,进一步提升了性能。
一、Flash Attention V1回顾
1.1 V1的核心思想
Flash Attention V1的核心在于分块计算和在线softmax算法。传统的注意力机制需要计算完整的注意力矩阵:
Attention(Q,K,V)=softmax(QKT/√d)V Attention(Q,K,V) = softmax(QK^T/√d)V Attention(Q,K,V)=softmax(QKT/√d)V
其时间复杂度为O(N²d),空间复杂度也为O(N²),其中N为序列长度,d为维度。对于长序列,这种二次复杂度会导致内存不足。
1.2 V1的分块策略
V1采用的策略是:
- 外循环:遍历K、V的分块(j方向)
- 内循环:遍历Q的分块(i方向)
j=0,这遍历i
j=1,这遍历i
具体流程:
- 将Q、K、V分别分割成多个块
- 外层循环遍历K、V的每个块
- 内层循环遍历Q的每个块
- 计算部分注意力分数并累积结果
1.3 在线softmax算法
为了处理分块计算中的softmax,V1使用了在线softmax算法:
python
# 在线softmax的核心公式
def online_softmax_update(old_max, old_sum, new_values):
new_max = max(old_max, max(new_values))
correction_factor = exp(old_max - new_max)
old_sum *= correction_factor
new_sum = old_sum + sum(exp(new_values - new_max))
return new_max, new_sum关键变量:
m_i^{(j)}: 当前分块的行最大值ℓ_i^{(j)}: 当前分块的行和O_i^{(j)}: 当前分块的输出累积值
二、Flash Attention V2的核心改进
2.1 循环顺序的调整
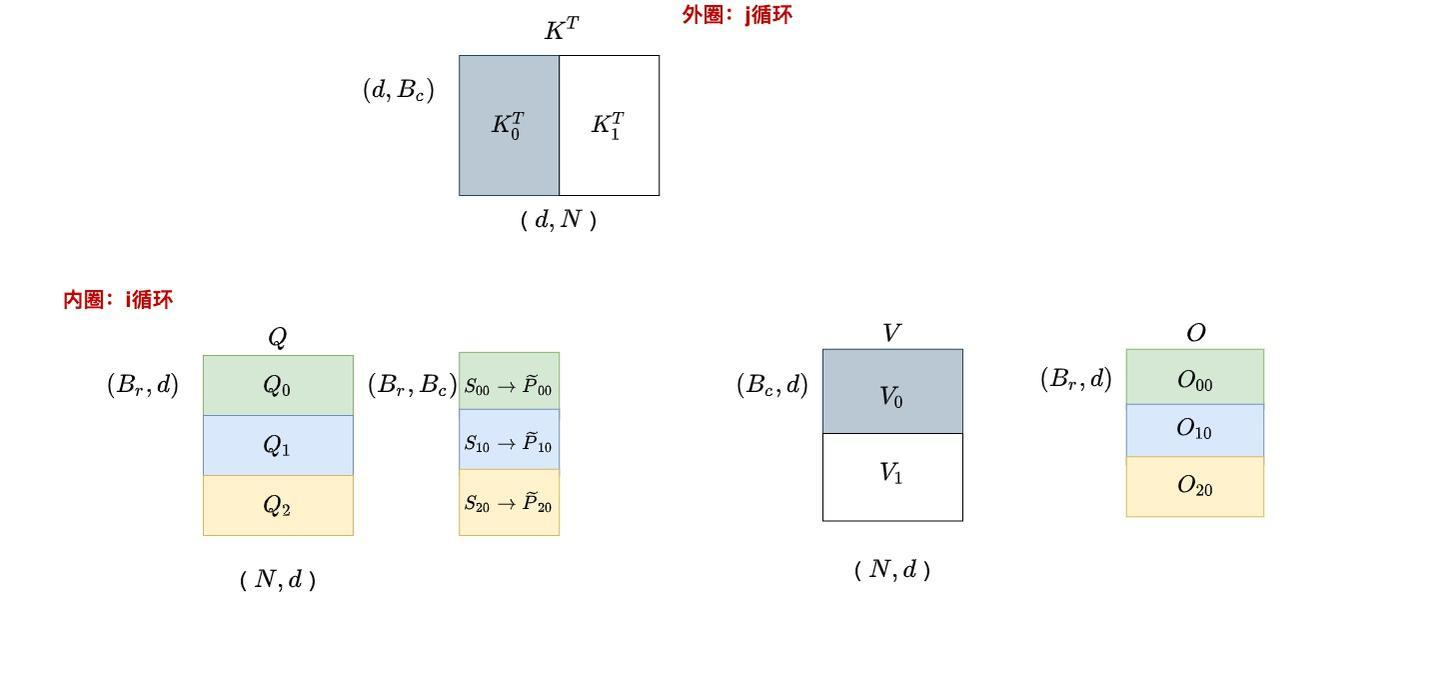
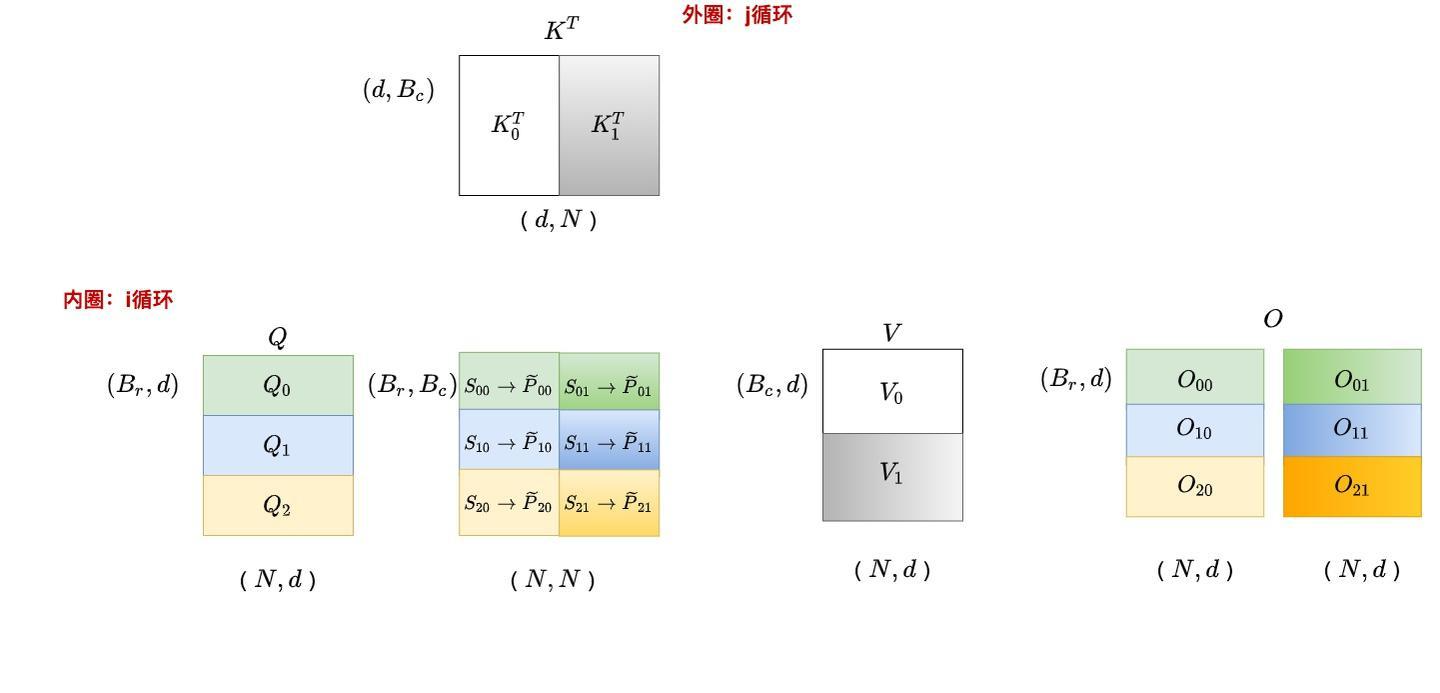
V2最重要的改进是交换了内外循环的顺序:
- 外循环:遍历Q的分块(i方向)
- 内循环:遍历K、V的分块(j方向)
这个看似简单的调整带来了显著的性能提升,原因在于:
数据局部性改进
固定Q块,遍历K、V块的方式更符合softmax的行计算特性。每一行的softmax计算可以一次性完成,避免了中间状态的反复存储和读取。
内存访问模式优化
python
# V1的访问模式
for j in range(num_kv_blocks):
load_kv_block(j)
for i in range(num_q_blocks):
load_q_block(i)
compute_attention_block(i, j)
save_intermediate_results(i)
# V2的访问模式
for i in range(num_q_blocks):
load_q_block(i)
initialize_output(i)
for j in range(num_kv_blocks):
load_kv_block(j)
update_output_incrementally(i, j)
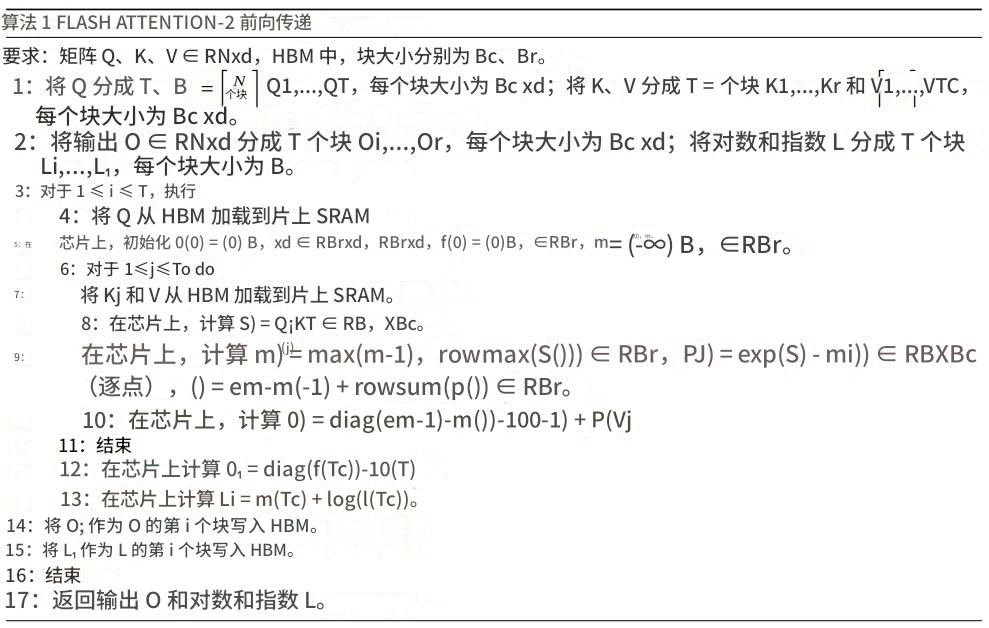
finalize_output(i)2.2 Forward Pass算法详解
V2的前向传播算法可以表示为以下伪代码:
python
def flash_attention_v2_forward(Q, K, V):
# 分块参数
Tr = ceil(N / Br) # Q块数量
Tc = ceil(N / Bc) # K,V块数量
# 初始化输出
O = zeros((N, d))
L = zeros(N) # log-sum-exp for numerical stability
# Q分块的外循环
for i in range(Tr):
# 从HBM加载Q块到SRAM
Qi = load_q_block(i)
# 初始化当前Q块的累积值
Oi = zeros((Br, d))
mi = fill(-inf, Br) # 行最大值
li = zeros(Br) # 行和
# K,V分块的内循环
for j in range(Tc):
# 从HBM加载K,V块到SRAM
Kj, Vj = load_kv_block(j)
# 计算注意力分数
Sij = Qi @ Kj.T # (Br, Bc)
# 更新行最大值
mi_new = element_wise_max(mi, row_max(Sij))
# 计算概率矩阵(未归一化)
Pij_tilde = exp(Sij - mi_new[:, None])
# 更新行和
correction = exp(mi - mi_new)
li = correction * li + row_sum(Pij_tilde)
# 更新输出
Oi = diag(correction) @ Oi + Pij_tilde @ Vj
# 更新行最大值
mi = mi_new
# 最终归一化
Oi = diag(1/li) @ Oi
# 保存到HBM
save_output_block(i, Oi)
Li = mi + log(li) # 保存log-sum-exp
save_lse_block(i, Li)
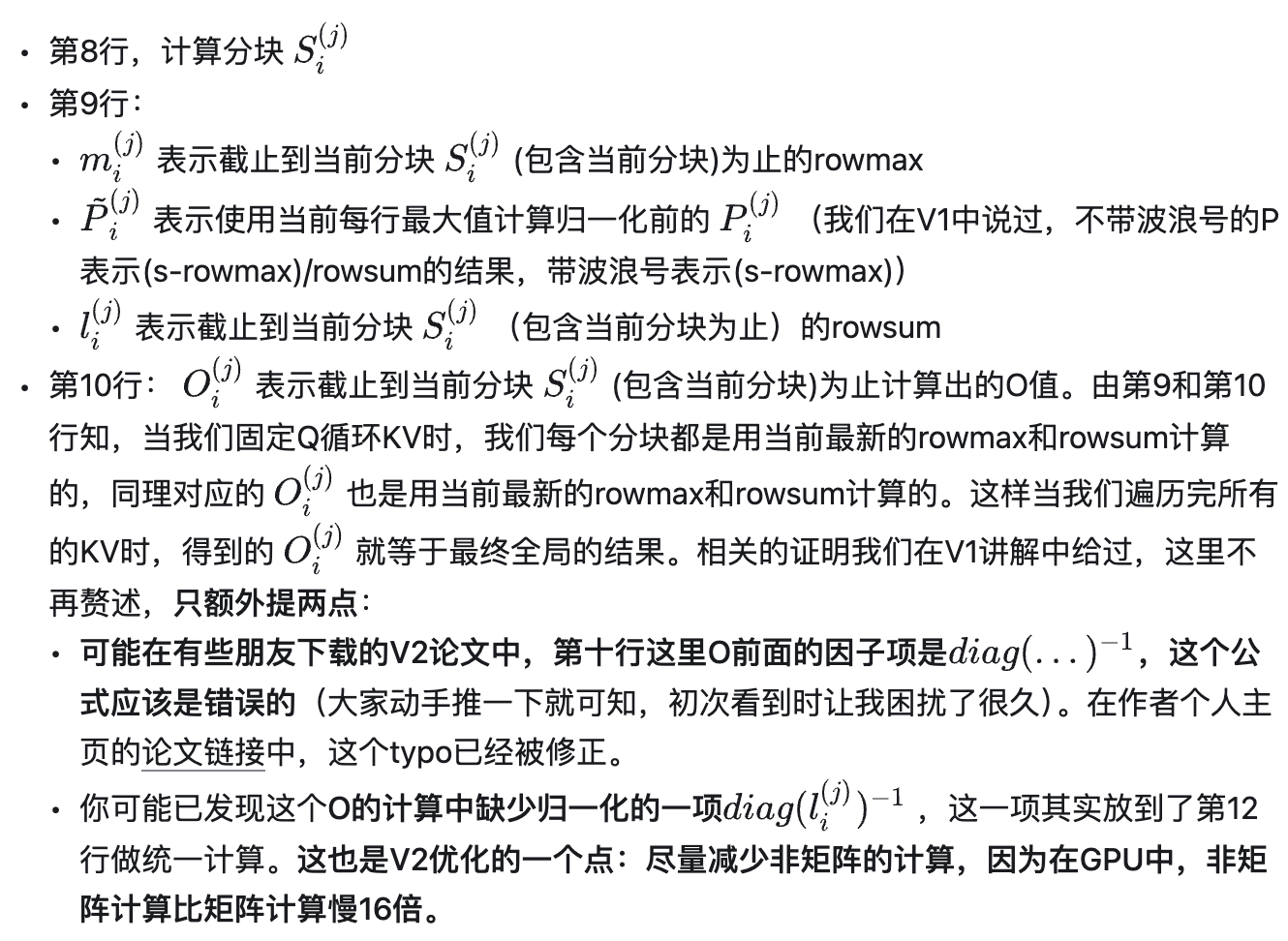
return O, L2.3 关键数学公式
V2中的核心更新公式:
行最大值更新
mi(j)=max(mi(j−1),rowmax(Sij)) m_i^{(j)} = max(m_i^{(j-1)}, rowmax(S_ij)) mi(j)=max(mi(j−1),rowmax(Sij))
概率矩阵计算
P~ij=exp(Sij−mi(j)) P̃_ij = exp(S_ij - m_i^{(j)}) P~ij=exp(Sij−mi(j))
行和更新
ℓi(j)=emi(j−1)−mi(j)⋅ℓi(j−1)+rowsum(P~ij) ℓ_i^{(j)} = e^{m_i^{(j-1)} - m_i^{(j)}} · ℓ_i^{(j-1)} + rowsum(P̃_ij) ℓi(j)=emi(j−1)−mi(j)⋅ℓi(j−1)+rowsum(P~ij)
输出更新
Oi(j)=diag(emi(j−1)−mi(j))⋅Oi(j−1)+P~ijVj O_i^{(j)} = diag(e^{m_i^{(j-1)} - m_i^{(j)}}) · O_i^{(j-1)} + P̃_ij V_j Oi(j)=diag(emi(j−1)−mi(j))⋅Oi(j−1)+P~ijVj
2.4 Backward Pass的循环策略
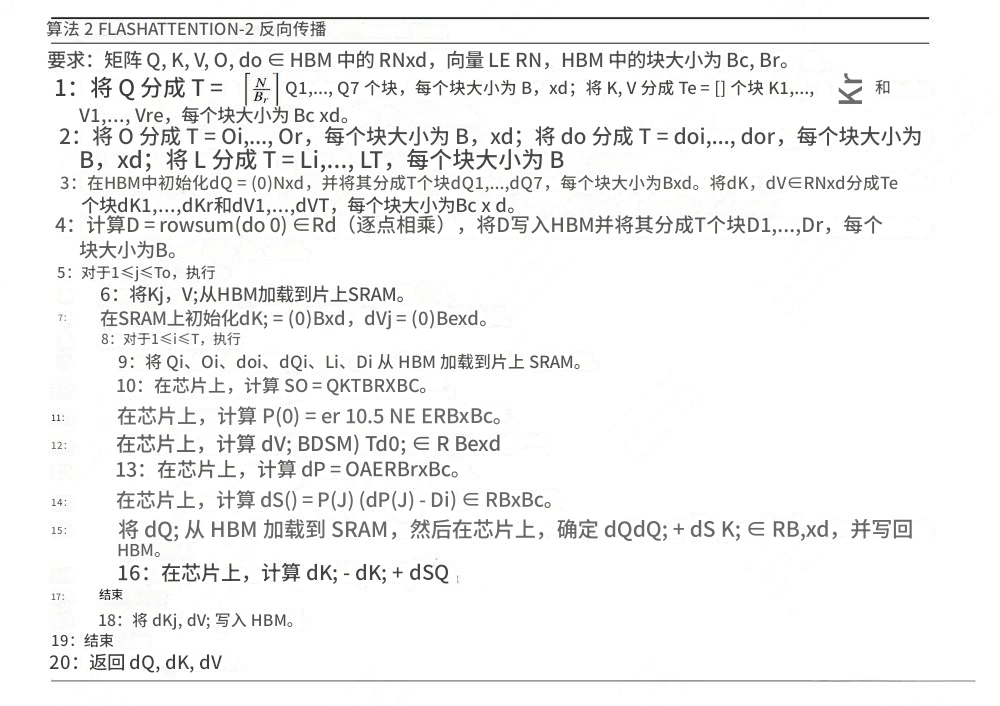
有趣的是,V2在反向传播中又采用了V1的循环顺序(KV外循环,Q内循环)。这是因为:
-
梯度计算的特性:
- dK, dV需要沿i方向累加(行累加)
- dQ需要沿j方向累加(列累加)
- 采用KV外循环对dK, dV更有利
-
数据读写优化:
python# V2 Backward的访问模式 for j in range(num_kv_blocks): load_kv_block(j) initialize_gradients_kv(j) for i in range(num_q_blocks): load_q_block(i) load_intermediate_values(i) compute_gradients(i, j) accumulate_dK_dV(j) update_dQ(i)
三、V2的并行优化策略
3.1 Thread Block级别的并行
V1的并行策略
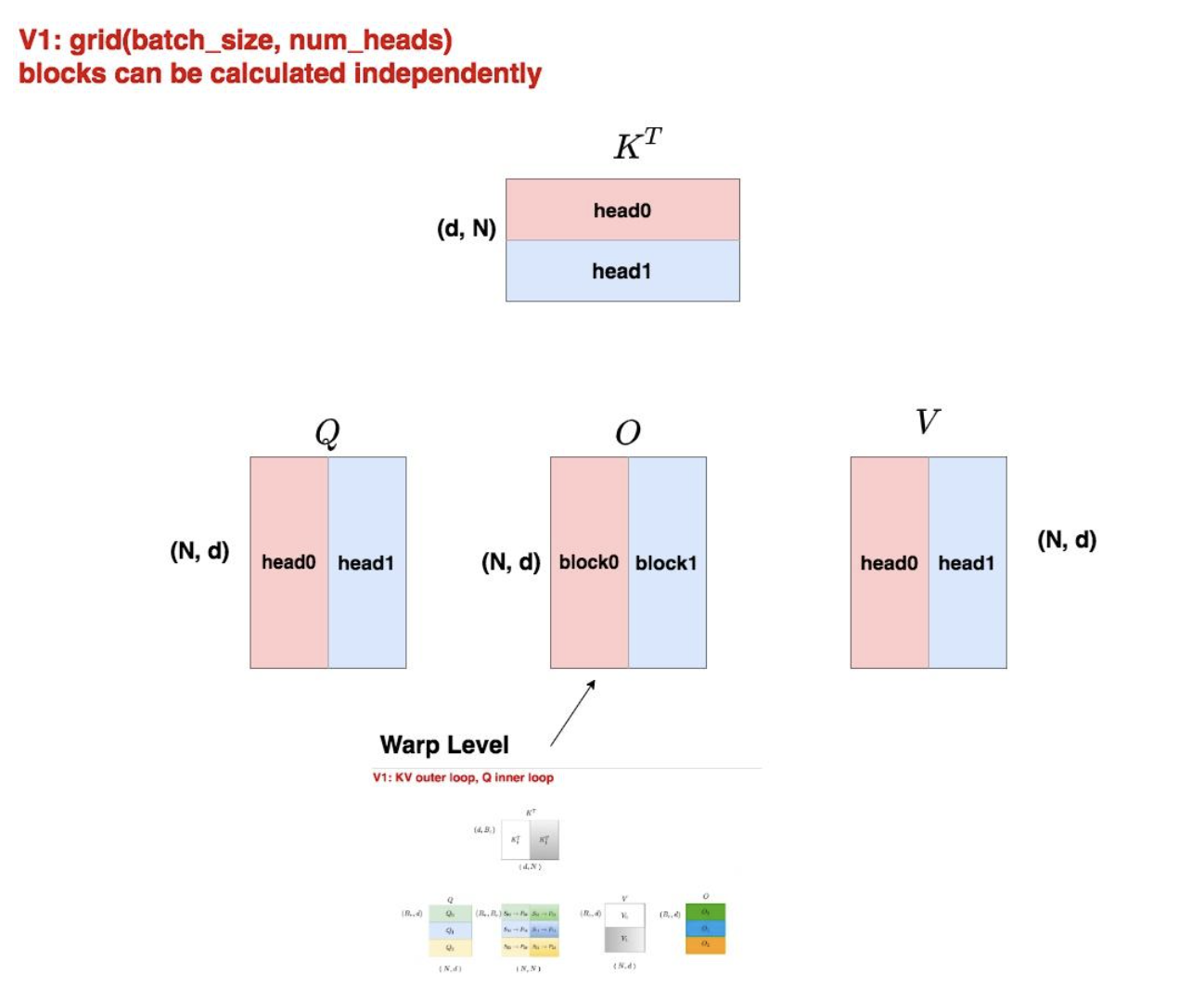
python
# V1的grid配置
grid = (batch_size, num_heads)每个thread block负责一个完整的attention head计算。
V2的并行策略
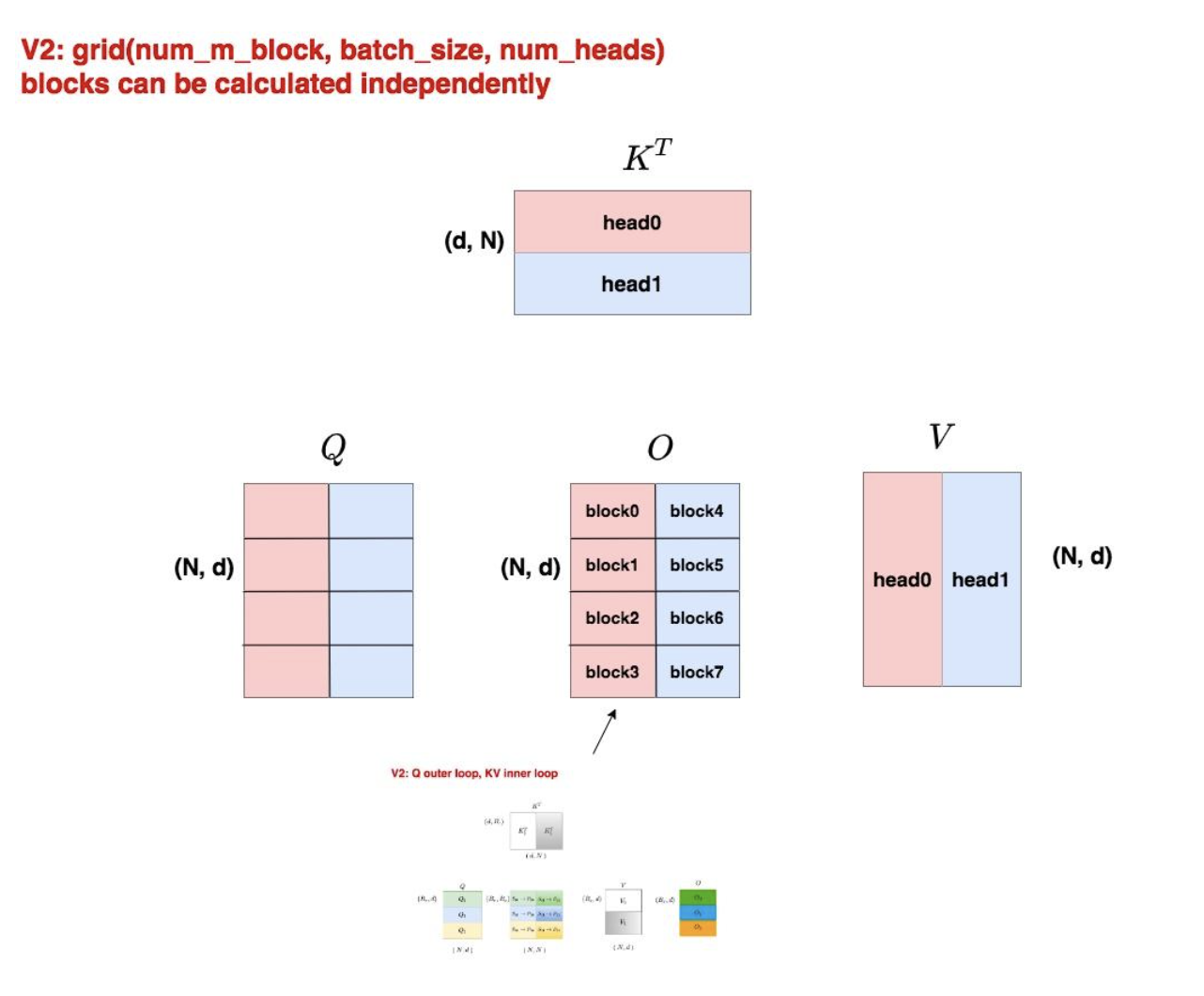
python
# V2的grid配置
num_m_block = (seq_len_q + block_size - 1) // block_size
grid = (num_m_block, batch_size, num_heads)V2在序列维度上也进行了并行分割,显著提升了SM(Streaming Multiprocessor)的利用率。
3.2 SM利用率分析
假设一个A100 GPU有108个SM:
V1的利用情况
- 当batch_size=2, num_heads=8时,总共16个blocks
- SM利用率 = 16/108 ≈ 14.8%
V2的利用情况
- 当seq_len=2048, block_size=64时,num_m_block=32
- 总block数 = 32 × 2 × 8 = 512个blocks
- SM利用率接近100%
3.3 Cache友好性优化
V2调整了grid的维度顺序:(num_m_block, batch_size, num_heads),这样同一列的blocks访问相同的K、V数据,提升了L2 cache命中率。
python
# Cache友好的访问模式示例
def cache_friendly_access():
for col_idx in range(num_m_block):
kv_data = load_kv_once() # 多个blocks共享
for batch in range(batch_size):
for head in range(num_heads):
process_block(col_idx, batch, head, kv_data)四、Warp级别的工作分配
4.1 V1的Warp分配
在V1中,每个thread block内的4个warp(Ampere架构)按列分割工作:
- 每个warp处理输出矩阵的不同列
- 需要warp间通信来合并最终结果
- 存在shared memory的读写开销
4.2 V2的Warp分配
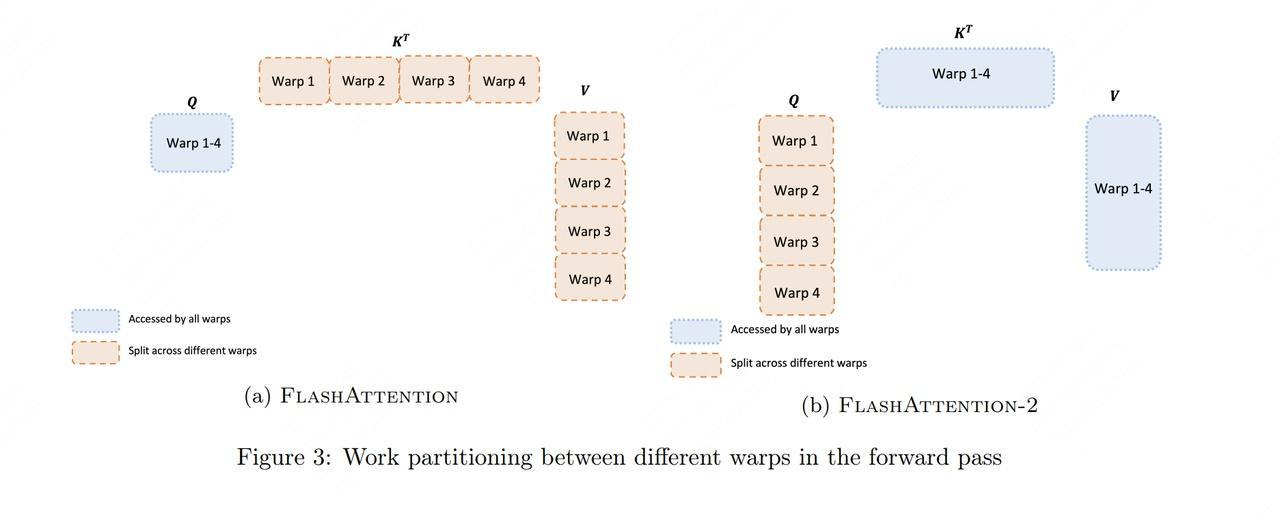
V2将工作按行分割:
- 每个warp处理输出矩阵的不同行
- 行间计算完全独立,无需warp间通信
- 减少了shared memory的使用
python
# V1的warp分配(列分割)
def v1_warp_distribution():
shared_memory = allocate_shared_memory()
for warp_id in range(4):
partial_result = compute_columns(warp_id)
shared_memory[warp_id] = partial_result
# 需要同步和合并
synchronize_warps()
final_result = merge_results(shared_memory)
# V2的warp分配(行分割)
def v2_warp_distribution():
for warp_id in range(4):
row_result = compute_rows(warp_id)
# 直接写入最终位置,无需合并
write_output(warp_id, row_result)五、非矩阵运算的优化
V2特别强调减少非矩阵运算(non-matmul FLOPs),因为在GPU上,非矩阵运算比矩阵运算慢约16倍。
5.1 归一化操作的延迟
python
# V1的做法:每次都做归一化
def v1_normalization():
for j in range(num_blocks):
Pij = compute_attention_scores(i, j)
Pij_normalized = Pij / rowsum(Pij) # 每次都归一化
Oi += Pij_normalized @ Vj
# V2的做法:延迟到最后统一归一化
def v2_normalization():
for j in range(num_blocks):
Pij_unnormalized = compute_attention_scores(i, j)
Oi += Pij_unnormalized @ Vj # 累积未归一化的结果
Oi = Oi / final_normalizer # 最后统一归一化5.2 中间状态存储的简化
V2只存储一个关键量:LSE = m + log(ℓ)(log-sum-exp),而不是分别存储m和ℓ,减少了内存读写。
六、代码实现示例
基于以上原理,我们可以实现一个简化版的Flash Attention V2:
python
import torch
import math
from typing import Tuple
class FlashAttentionV2:
def __init__(self, block_size_q: int = 64, block_size_kv: int = 64):
self.Br = block_size_q # Q的分块大小
self.Bc = block_size_kv # K,V的分块大小
def forward(self, Q: torch.Tensor, K: torch.Tensor, V: torch.Tensor) -> torch.Tensor:
"""
Flash Attention V2前向传播
Args:
Q: Query矩阵,shape (batch, heads, seq_len, d_head)
K: Key矩阵,shape (batch, heads, seq_len, d_head)
V: Value矩阵,shape (batch, heads, seq_len, d_head)
Returns:
O: 输出矩阵,shape (batch, heads, seq_len, d_head)
"""
batch_size, num_heads, seq_len, d_head = Q.shape
device = Q.device
# 计算分块数量
Tr = math.ceil(seq_len / self.Br) # Q分块数量
Tc = math.ceil(seq_len / self.Bc) # K,V分块数量
# 初始化输出矩阵
O = torch.zeros_like(Q)
# 缩放因子
scale = 1.0 / math.sqrt(d_head)
# Q分块的外循环(V2的关键改进)
for i in range(Tr):
# 计算当前Q块的索引范围
start_q = i * self.Br
end_q = min((i + 1) * self.Br, seq_len)
# 加载Q块
Qi = Q[:, :, start_q:end_q, :] # (batch, heads, Br, d_head)
# 初始化当前Q块的累积状态
block_size_q = end_q - start_q
# 行最大值,初始化为负无穷
mi = torch.full((batch_size, num_heads, block_size_q),
float('-inf'), device=device)
# 行和,初始化为0
li = torch.zeros((batch_size, num_heads, block_size_q), device=device)
# 输出累积值,初始化为0
Oi = torch.zeros((batch_size, num_heads, block_size_q, d_head), device=device)
# K,V分块的内循环
for j in range(Tc):
# 计算当前K,V块的索引范围
start_kv = j * self.Bc
end_kv = min((j + 1) * self.Bc, seq_len)
# 加载K,V块
Kj = K[:, :, start_kv:end_kv, :] # (batch, heads, Bc, d_head)
Vj = V[:, :, start_kv:end_kv, :] # (batch, heads, Bc, d_head)
# 计算注意力分数 Sij = Qi @ Kj.T
Sij = torch.matmul(Qi, Kj.transpose(-2, -1)) * scale
# Shape: (batch, heads, Br, Bc)
# 计算当前块的行最大值
mij = torch.max(Sij, dim=-1, keepdim=False)[0] # (batch, heads, Br)
# 更新全局行最大值
mi_new = torch.maximum(mi, mij)
# 计算概率矩阵(未归一化)
Pij_tilde = torch.exp(Sij - mi_new.unsqueeze(-1))
# 计算当前块的行和
lij = torch.sum(Pij_tilde, dim=-1) # (batch, heads, Br)
# 计算修正因子
correction = torch.exp(mi - mi_new)
# 更新行和
li_new = correction * li + lij
# 更新输出累积值
# 首先对旧的输出应用修正因子
Oi = Oi * correction.unsqueeze(-1)
# 然后加上当前块的贡献
Oi = Oi + torch.matmul(Pij_tilde, Vj)
# 更新状态变量
mi = mi_new
li = li_new
# 最终归一化
Oi = Oi / li.unsqueeze(-1)
# 将结果写入输出矩阵
O[:, :, start_q:end_q, :] = Oi
return O
# 使用示例和测试
def test_flash_attention_v2():
"""测试Flash Attention V2的实现"""
batch_size = 2
num_heads = 8
seq_len = 512
d_head = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 生成随机输入
Q = torch.randn(batch_size, num_heads, seq_len, d_head, device=device)
K = torch.randn(batch_size, num_heads, seq_len, d_head, device=device)
V = torch.randn(batch_size, num_heads, seq_len, d_head, device=device)
# Flash Attention V2
flash_attn = FlashAttentionV2(block_size_q=64, block_size_kv=64)
output_flash = flash_attn.forward(Q, K, V)
# 标准注意力(用于对比)
def standard_attention(Q, K, V):
scale = 1.0 / math.sqrt(Q.size(-1))
scores = torch.matmul(Q, K.transpose(-2, -1)) * scale
attn_weights = torch.softmax(scores, dim=-1)
output = torch.matmul(attn_weights, V)
return output
output_standard = standard_attention(Q, K, V)
# 计算误差
max_error = torch.max(torch.abs(output_flash - output_standard))
mean_error = torch.mean(torch.abs(output_flash - output_standard))
print(f"最大误差: {max_error.item():.6f}")
print(f"平均误差: {mean_error.item():.6f}")
print(f"相对误差: {(mean_error / torch.mean(torch.abs(output_standard))).item():.6f}")
# 验证形状
assert output_flash.shape == output_standard.shape
print("形状验证通过!")
if __name__ == "__main__":
test_flash_attention_v2()七、主流大模型中Flash Attention的应用
7.1 开源模型的支持情况
目前大多数主流开源模型都支持Flash Attention,通常通过以下方式集成:
Llama系列
- Llama 3.1 : 原生支持Flash Attention 2,在transformers库中可通过
attn_implementation="flash_attention_2"启用 - Llama 3.2: 同样支持Flash Attention 2,特别优化了长上下文场景
- Llama 3.3: 延续了对Flash Attention 2的支持
python
# Llama模型启用Flash Attention的示例
from transformers import LlamaForCausalLM
model = LlamaForCausalLM.from_pretrained(
"meta-llama/Llama-3.1-7B",
attn_implementation="flash_attention_2",
torch_dtype=torch.float16,
device_map="auto"
)Qwen系列
- Qwen2.5: 完全支持Flash Attention 2,在长文档处理方面表现优异
- Qwen3: 预计将支持最新版本的Flash Attention-3
DeepSeek系列
- DeepSeek V2/V3: 在MoE架构中广泛使用Flash Attention 2来优化注意力计算
ChatGLM系列
- GLM-3: 支持Flash Attention 2
- GLM-4: 在更长的上下文长度下使用Flash Attention 2