一、ADC相关概念
ADC(Analog-to-digital converter):模数转换器
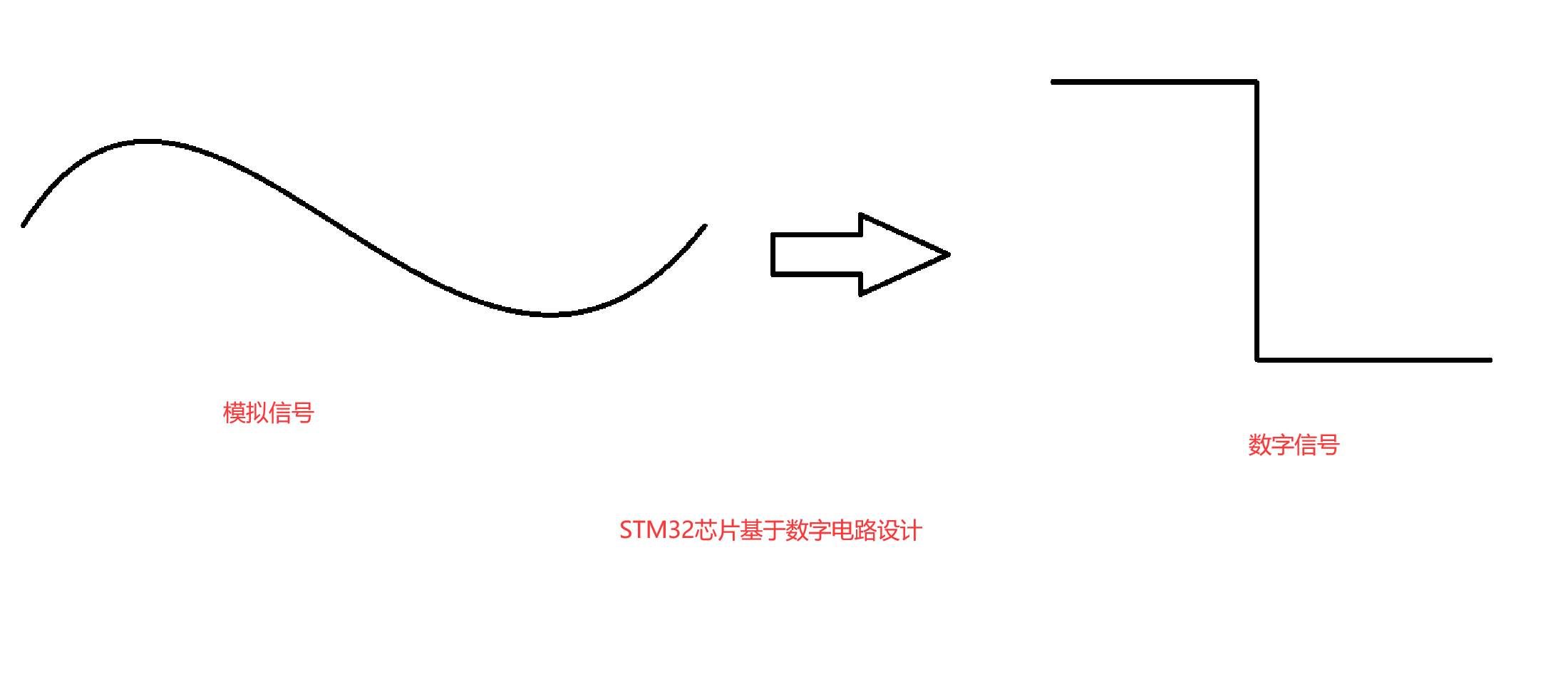
作用:将模拟信号转化为数字信号模拟信号:连续周期变化的电信号
数字信号:离散的以1/0组成的电信号
ADC的应用场景:一般用于电路中的电流/电压检测、也使用在各种传感器采集数据后进行传输(温湿度传感器)
ADC:就是将连续的模拟信号转换为离散的数字信号ADC 的转换过程本质是通过采样->保持->量化->编码 四个关键步骤,将连续信号 "离散化" 为数字代码。
ADC的工作流程:
模拟信号就绪→通道采样并保持信号→量化为离散等级→编码为二进制代码→写入数据寄存器→用户读取数字信号"。
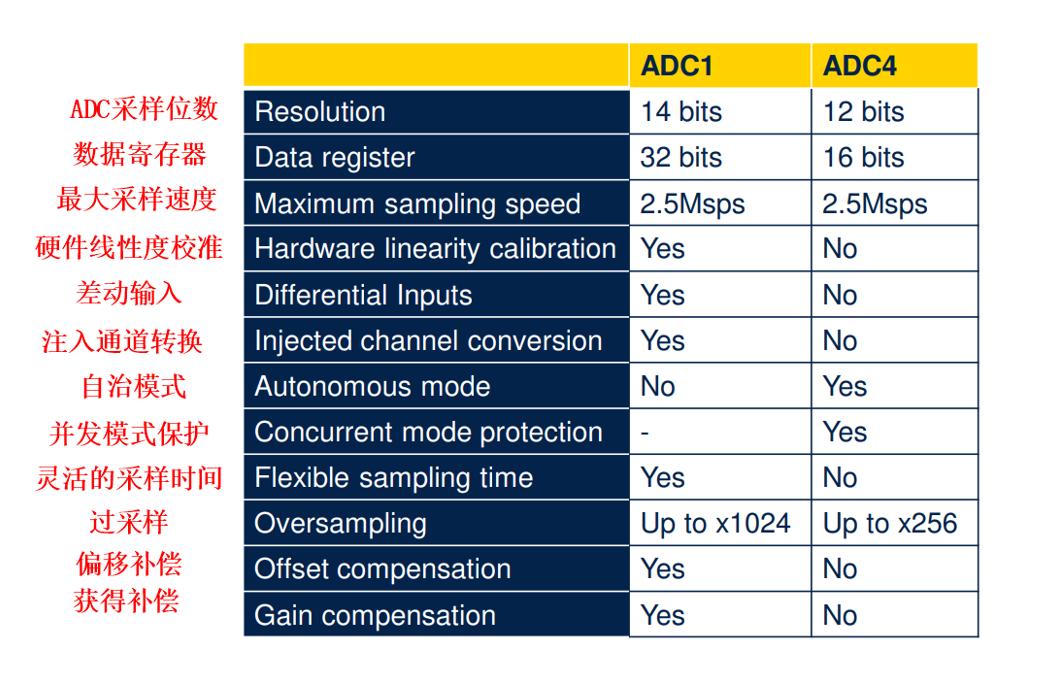
二、ADC1和ADC4
在STM32U575RIT6芯片中支持的是ADC1和ADC4外设控制器
1、采样位数:本质就是采样精度,ADC1采样转化后的数字信号是14位的,ADC4采样转化后的数字信号是12位
2、数据寄存器:采样转化得到的数字信号,会被存储到数据寄存器中,用户只需要读取数据寄存器中的值即可得到转化后的数字信号
3、电压转化公式:请看下图
待测电压=(ADC转化后的数字量*参考电压)/2^采样位数
4、ADC的采样校准和偏移补偿:请看下图
2.1采样原理
原理图:
解析:
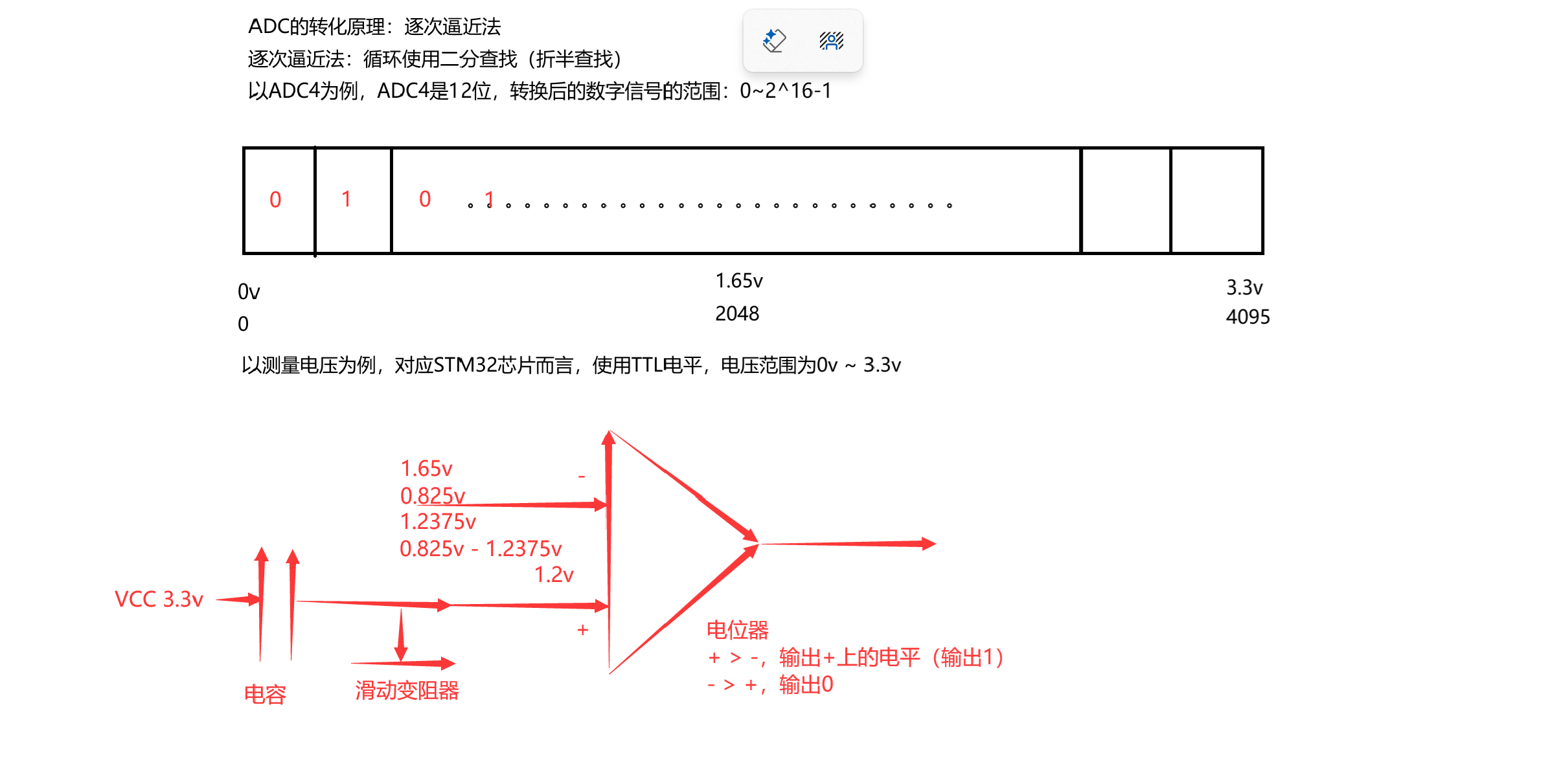
STM32U575RIT6中使用的是ADC采样方式:逐次逼近法。
逐次逼近法:循环使用二分半查找(折半查找)
eg:
以ADC4为例,采样位数为12位,也就是得到的数字信号是12位的(最小是0v最大是3.3v换个思路来理解就是十二位中最小的是0,最大的是4096,中间是1.65v(2048)),现在要查找1.2v(1489)就是一直使用二分缩小范围直到找到他
2.2转换公式
电压转化公式:待测电压(1.2v)、参考电压(3.3v)、ADC转化后的数字量
2^采样位数
ADC转化得到的数字量=------------------- x 待测电压
参考电压
ADC的视线原理是逐次逼近发,但是在使用ADC时,用于只需要打开ADC、等待ADC采样并转化、获取转化后的值就可以了
2.3采样校准和偏移补偿
图:
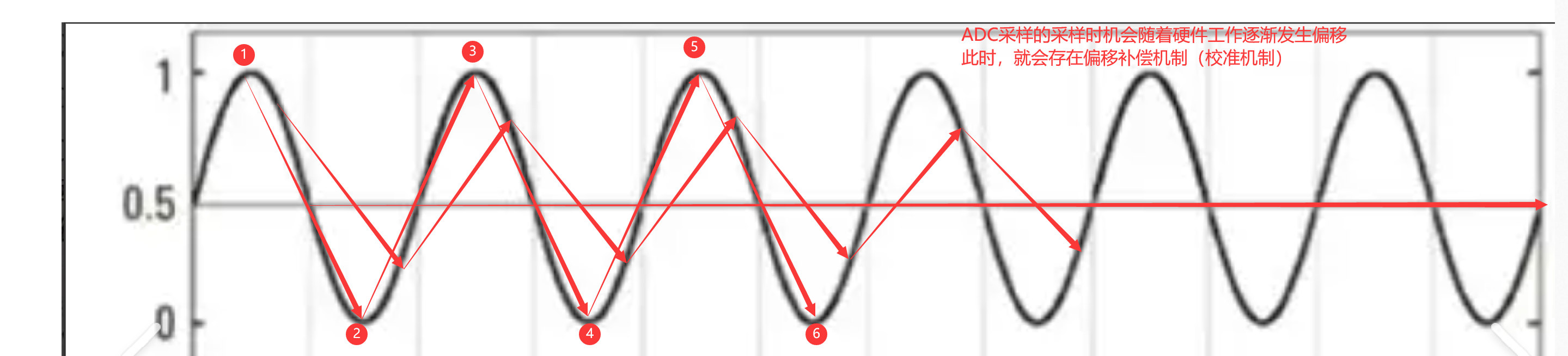
注释:
ADC的采样就相当于录制一个跳舞的视频
一个跳舞的视频=很多跳舞动作的图片,按顺序播放
拍对应跳舞动作的图片的时机=ADC采样的时机
拍照的时机不可能固定=ADC采样时机可能发生偏移
如果ADC采样发生偏移,此时采样得到的诗句可能不是很准确,就需要使用硬件提供的偏移补偿机制(校准机制)
使用偏移补偿机制(校准机制)用于初始化采样机制
2.4ADC的通道
1、等待转化的模拟信号
2、ADC的通道:采样等待转化的模拟信号,在此处进行模拟信号转化为数字信号
3、ADC的数据寄存器:用户可以从此处读到转化完毕的数字信号
2.5ADC1的通道
图:
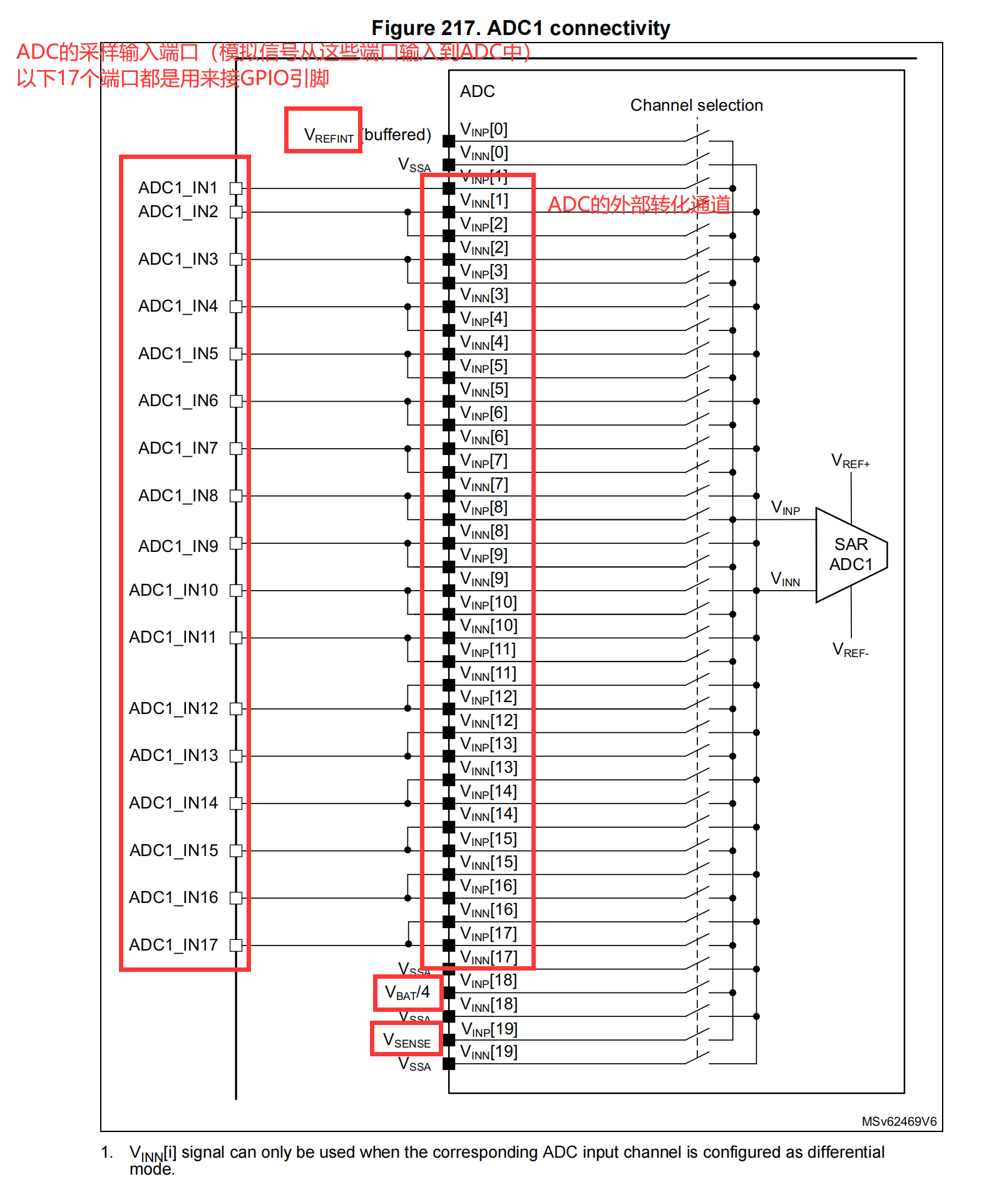
注释:
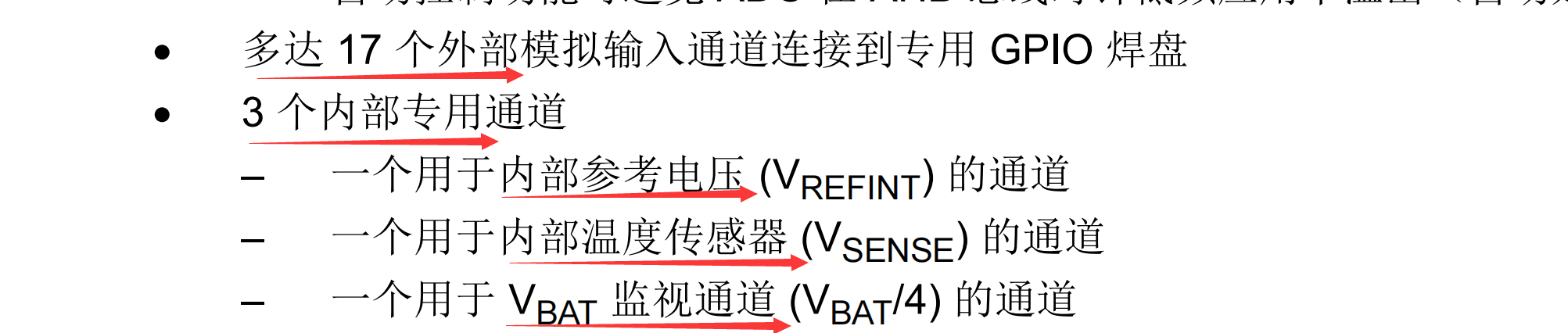
ADC1:具备20个独立通道(用于采样模拟信号,转化模拟信号)
20个独立通道中:存在17个链接GPIO引脚的通道(外部通道),
存在3个连接芯片内部传感去的通道(内部通道)
2.6ADC4的通道
图:
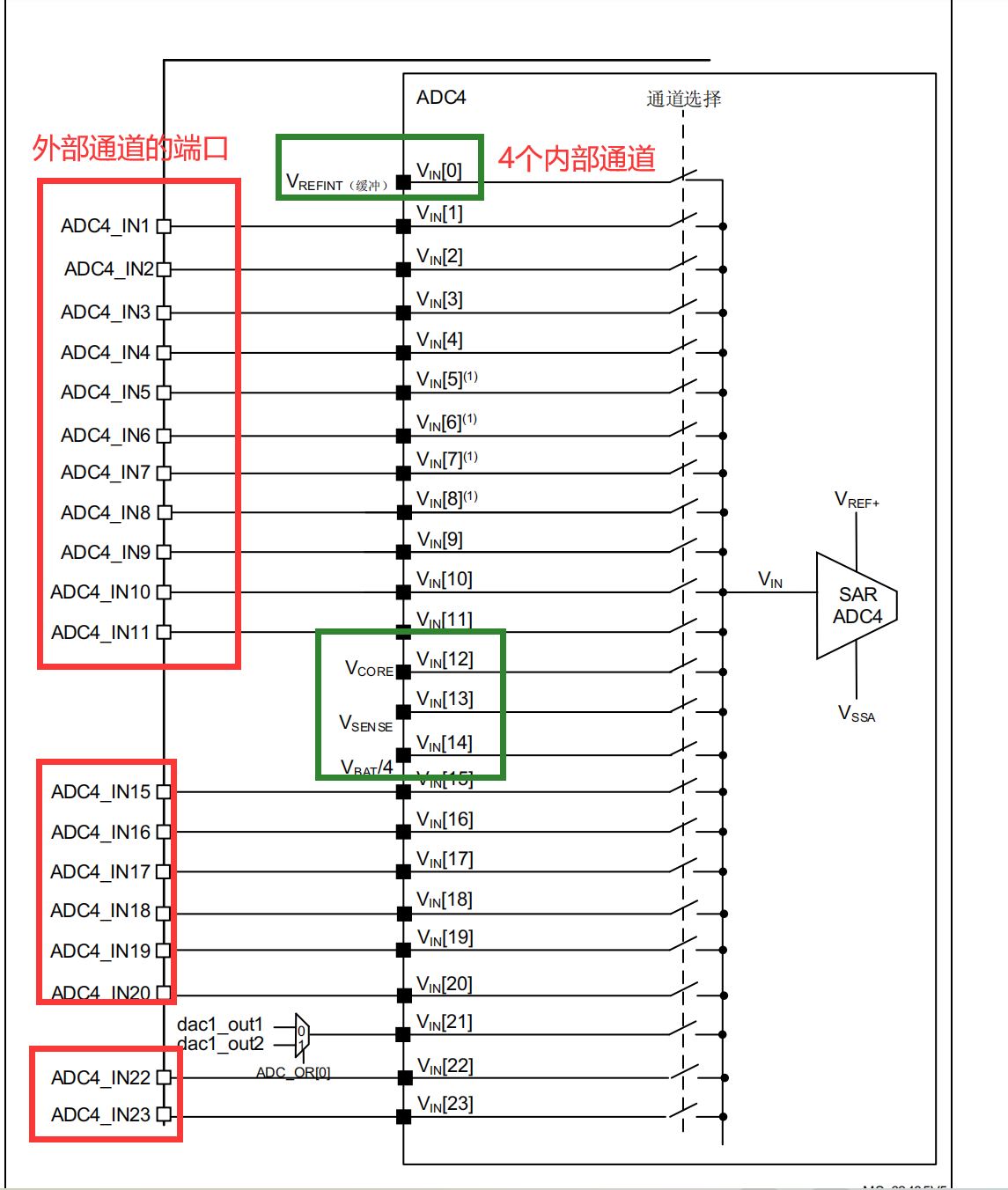
注释:
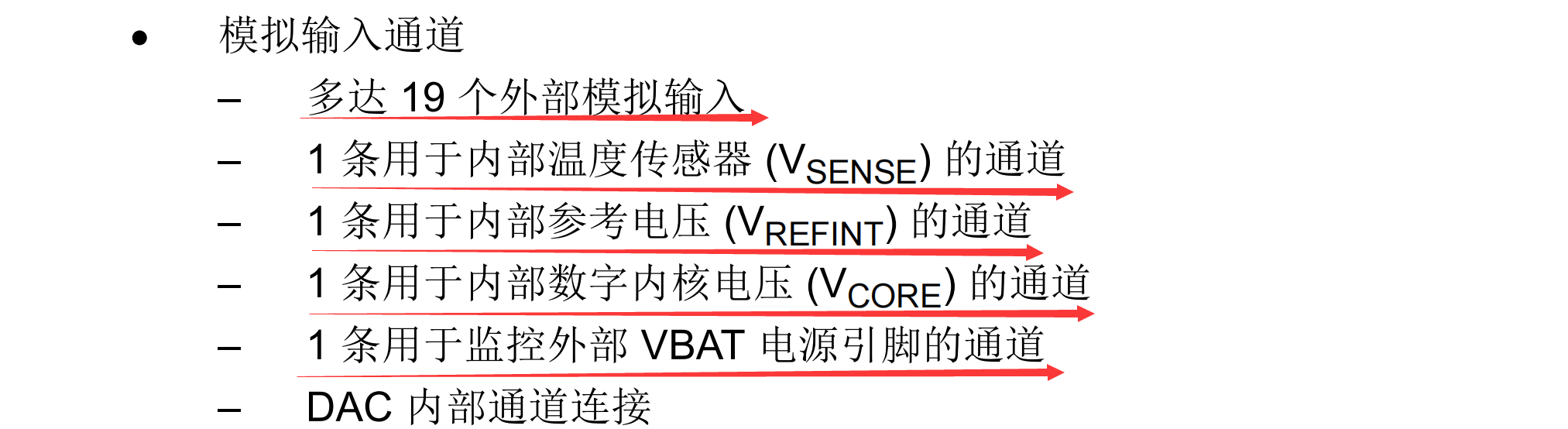
ADC4:具备24个独立通道(用于采样模拟信号,转化模拟信号)
24个独立通道中:存在19个链接GPIO引脚的通道(外部通道),
存在4个连接芯片内部传感去的通道(内部通道)
存在1个链接DAC外设控制器的通道
三、ADC的采样转化模式(扫描模式)
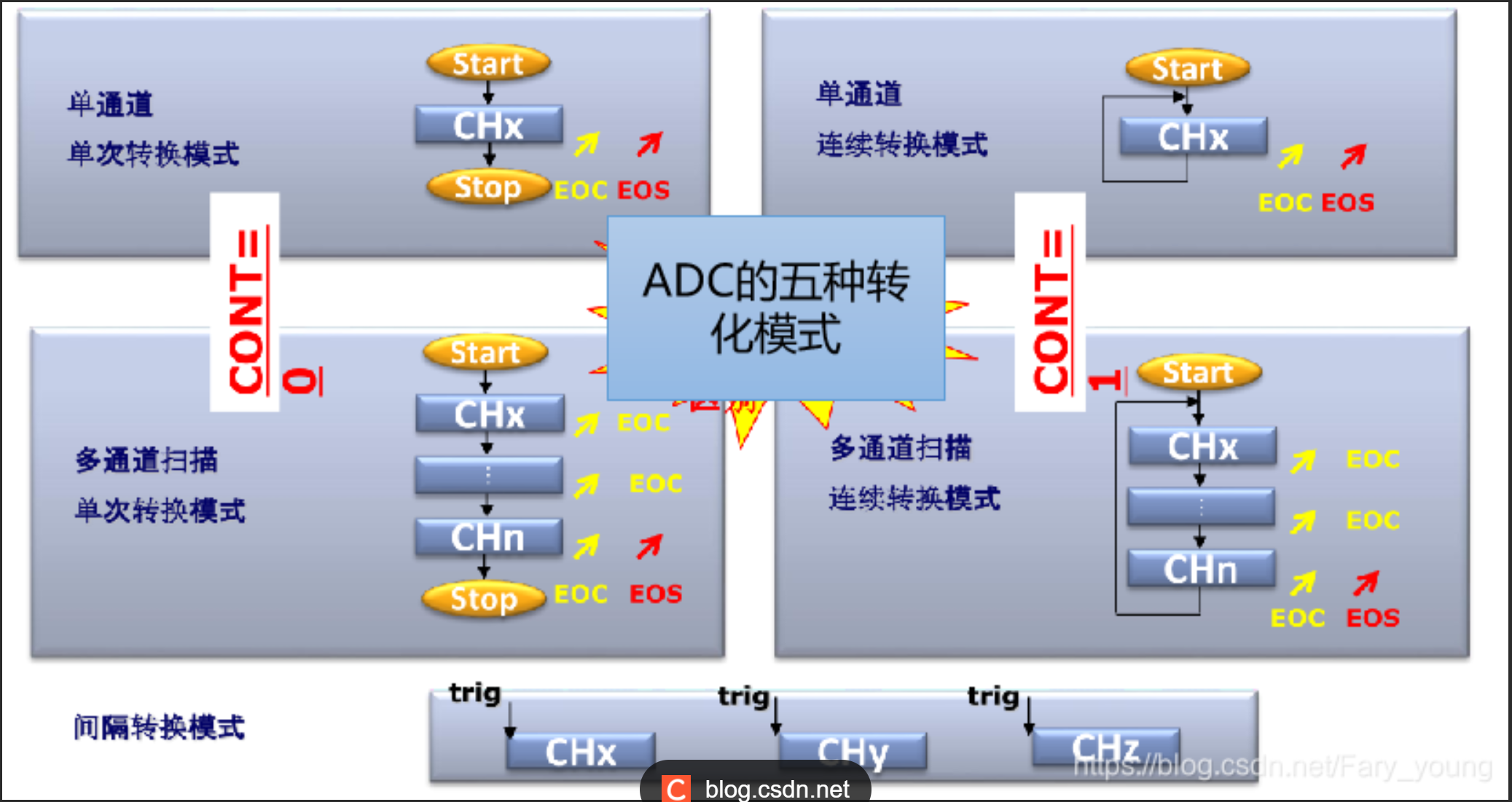
ADC的采样转化模式有五种:1、单通道单次转化模式 2、单通道连续转化模式 3、多通道单次转化模式 4、多通道连续转化模式 5、间隔转化模式(触发转化模式
1、单通道单次转化模式:
就是只使用一个ADC通道进行模拟信号的采样和转化,并且只转化一次,转化完的数据保存到数据寄存器中,此时当前转化就结束了
2、单通道连续转化模式:
使用一个ADC通道进行模拟信号的采样和转化,转化完的数据保存到数据寄存器中,紧接着开启下一次转换
单通道单次转化+while(1)=单通道连续转化
3、多通道单次转化模式:
就是使用多个ADC通道进行模拟信号的采样和转化,按照顺序依次转化通道中的模拟信号,转化完的数据保存到数据寄存器中,当这些使能通道中的数据转化并放到数据寄存器中后,此时当前多通道单次转化就结束了,如果想开次下一次转化,需要手动开启
4、多通道连续转化模式:
就是使用多个ADC通道进行模拟信号的采样和转化,按照顺序依次转化通道中的模拟信号,转化完的数据保存到数据寄存器中,当这些使能通道中的数据转化并放到数据寄存器中后,此时会回到最初始的通道开启二次或者N次转化,无需手动开启
多通道单次转化+while(1)=多通道连续转化
5、间隔转化模式(触发转化模式):
使用间隔转化模式时,需要触发源,触发源触发一次,ADC就转化一次
ADC的转化模式:独立模式(单通道模式)、扫描模式(多通道模式)、触发模式
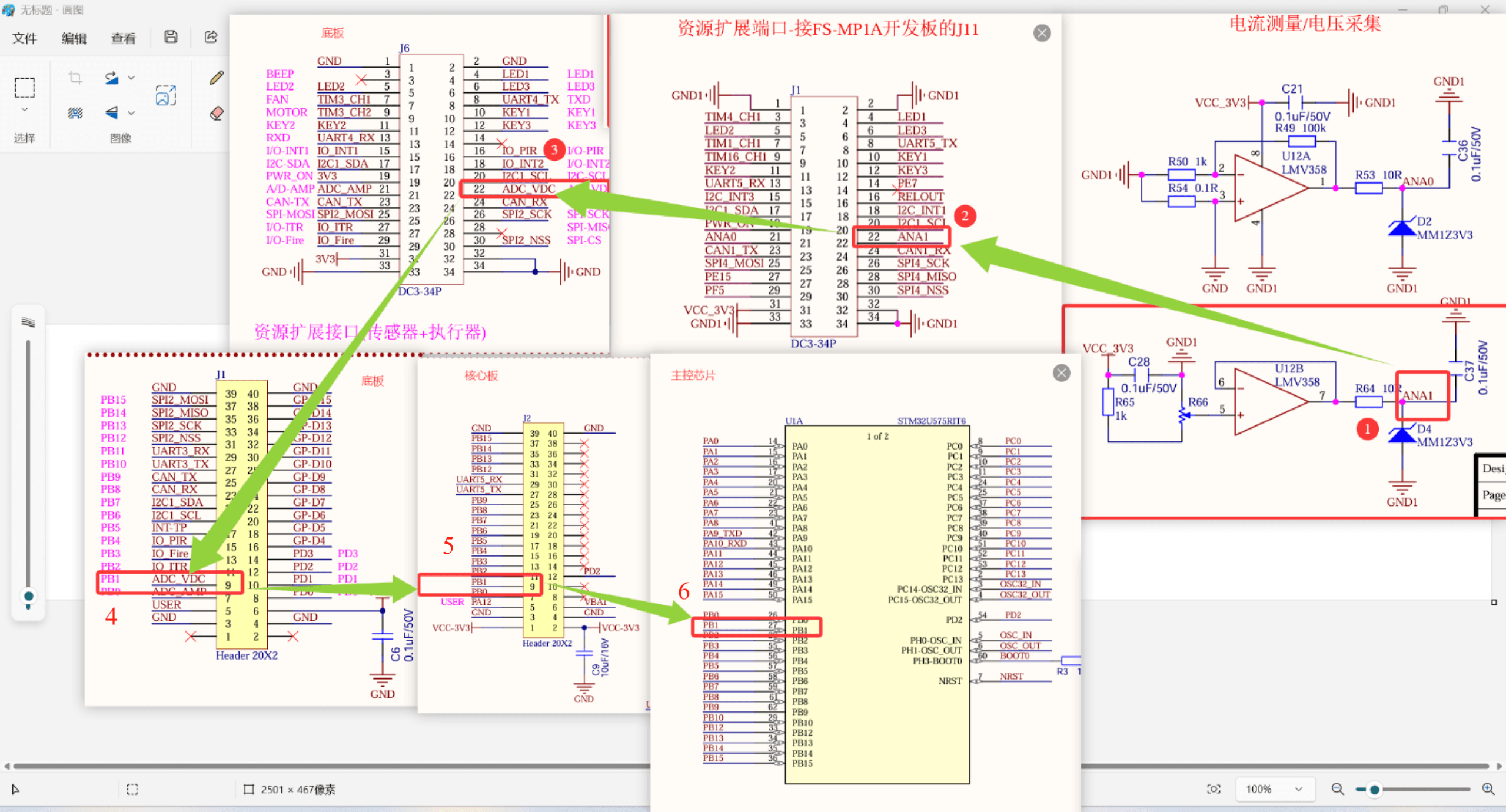
四、分析电路图
ANA1->ADC_VDC->PB1
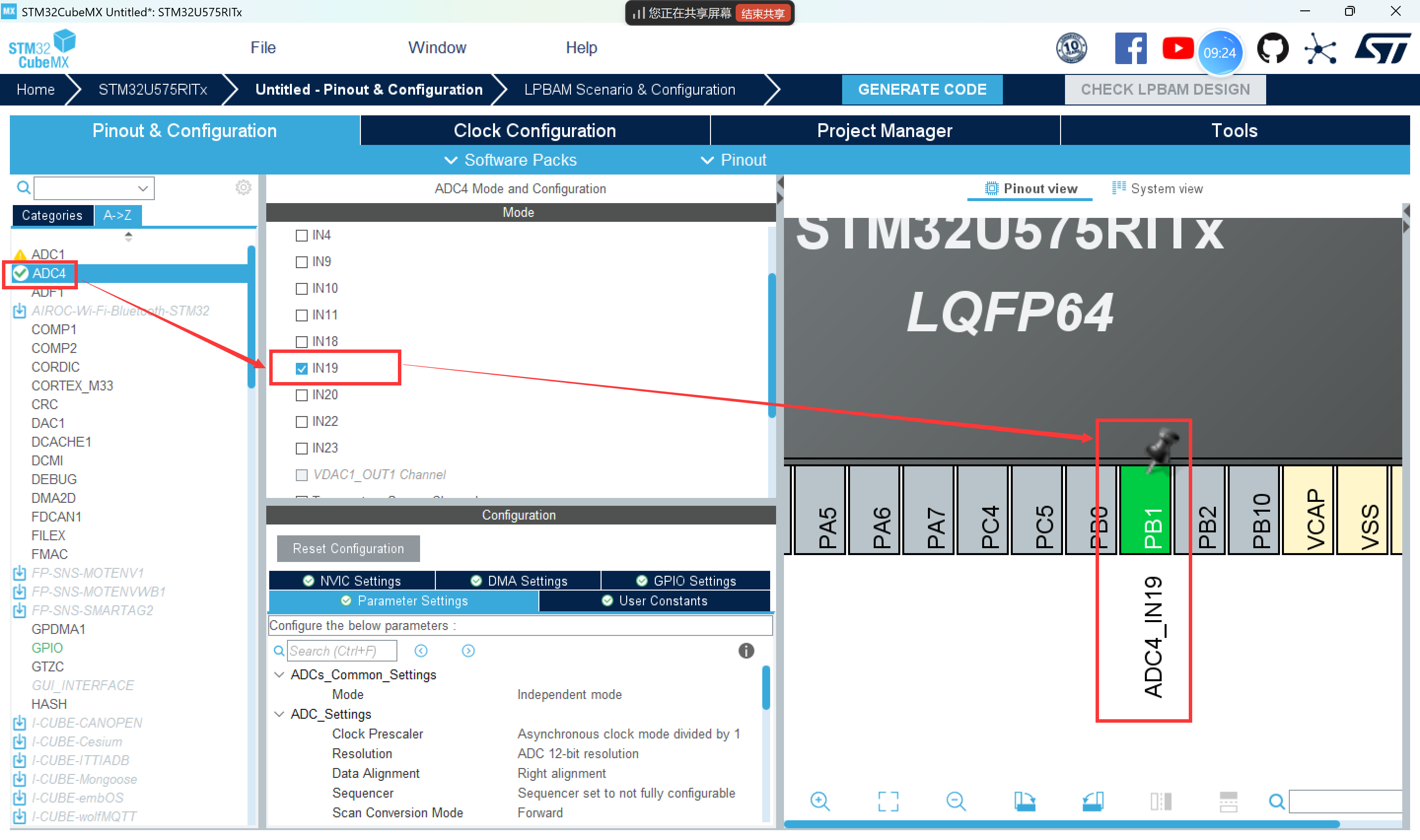
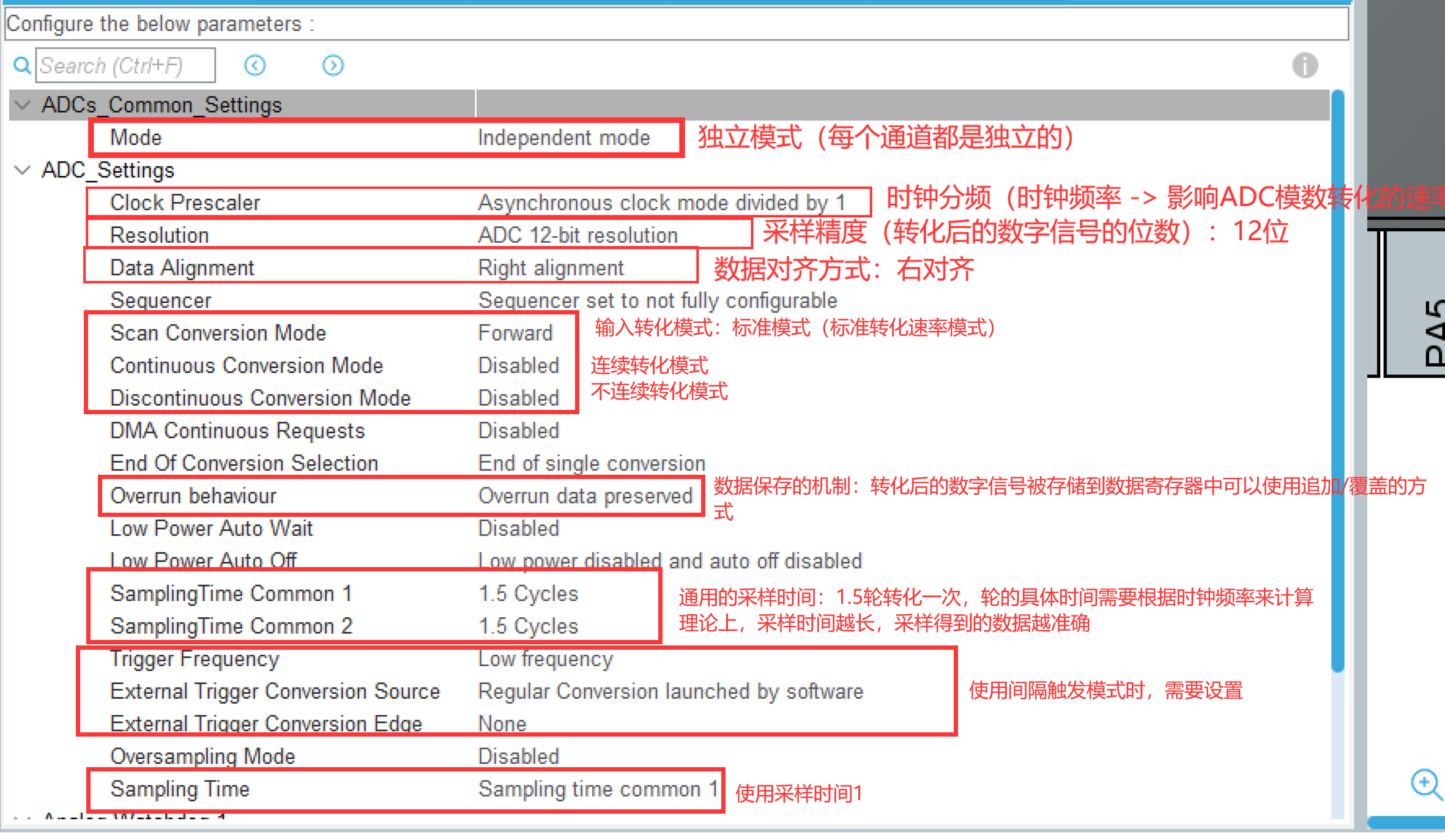
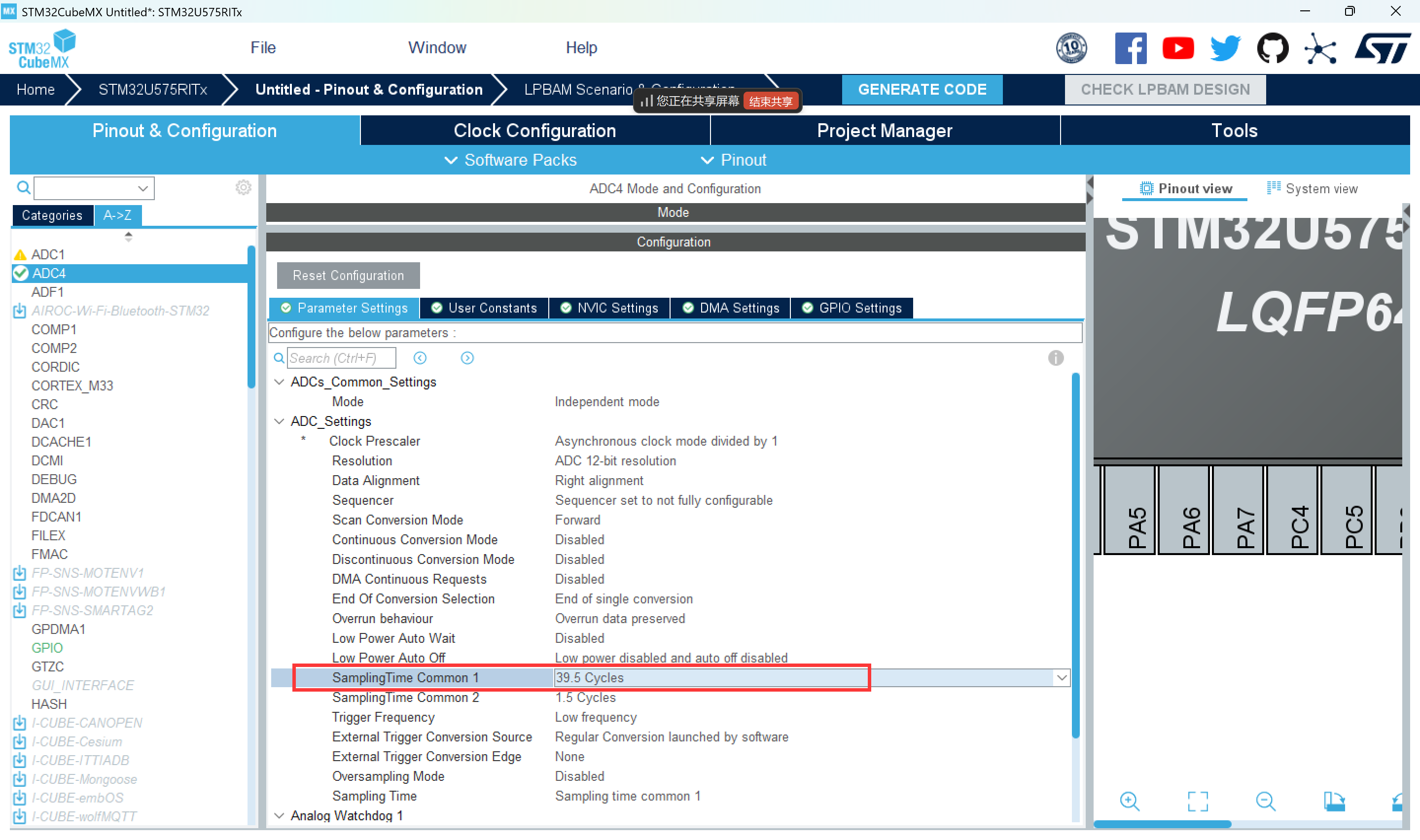
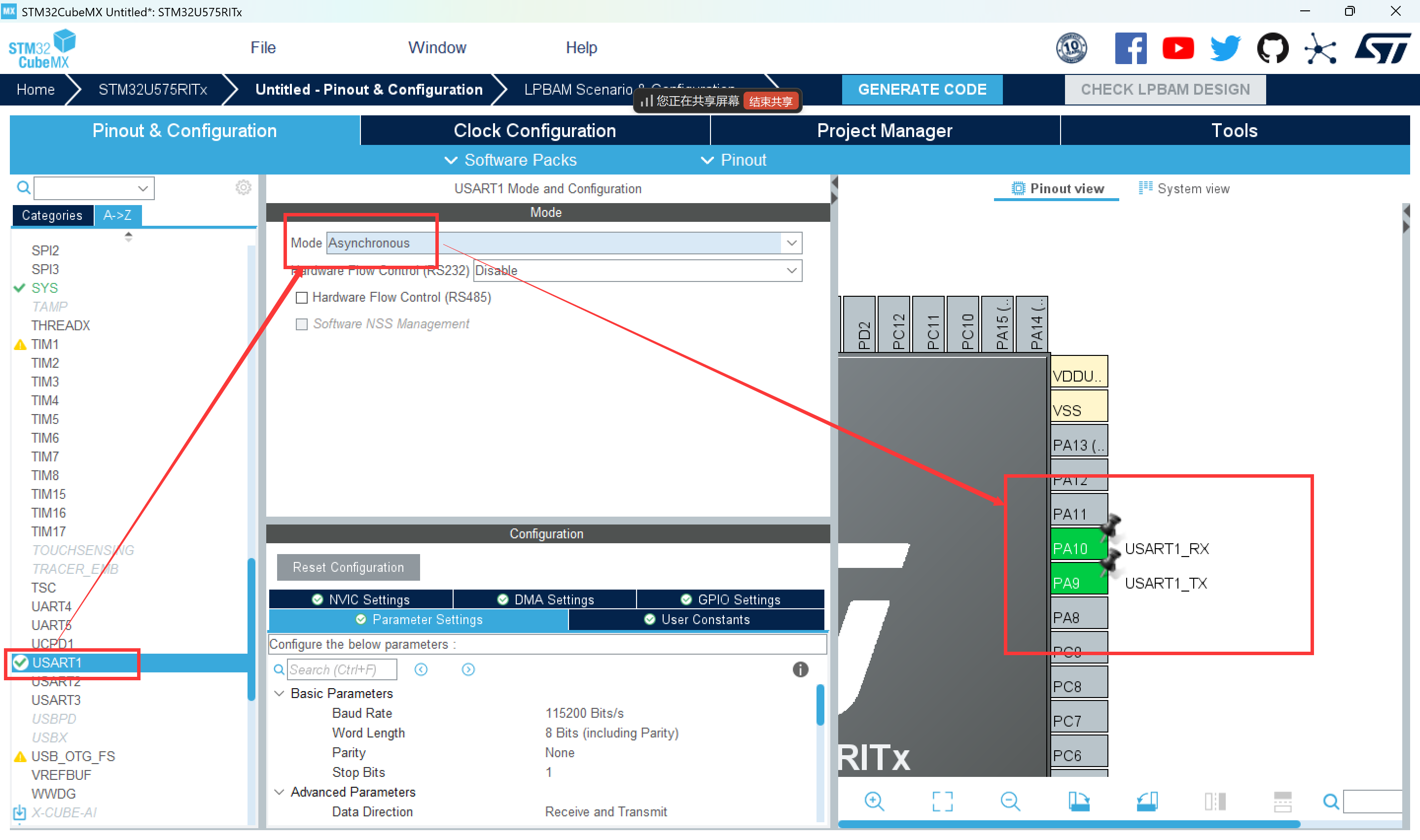
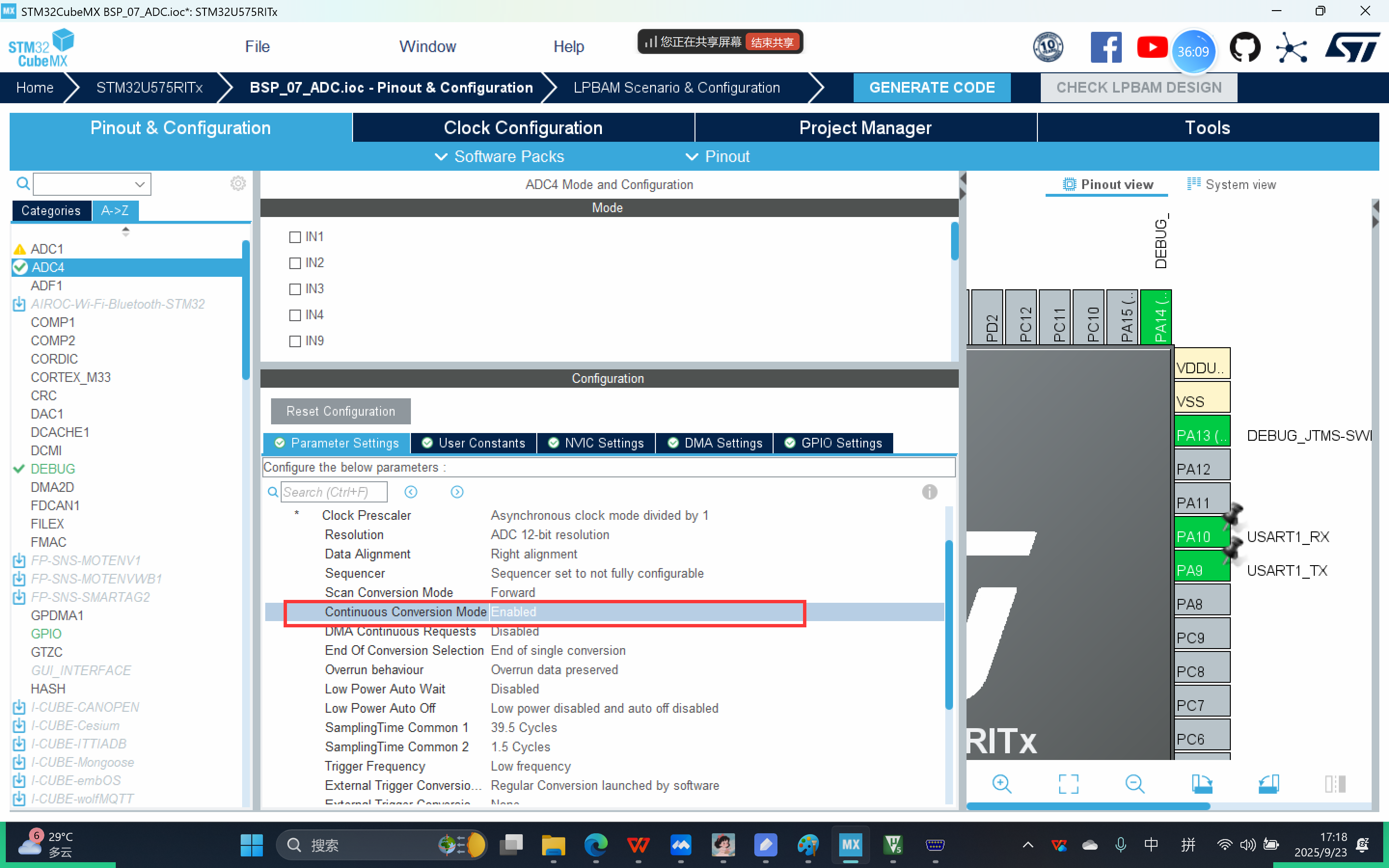
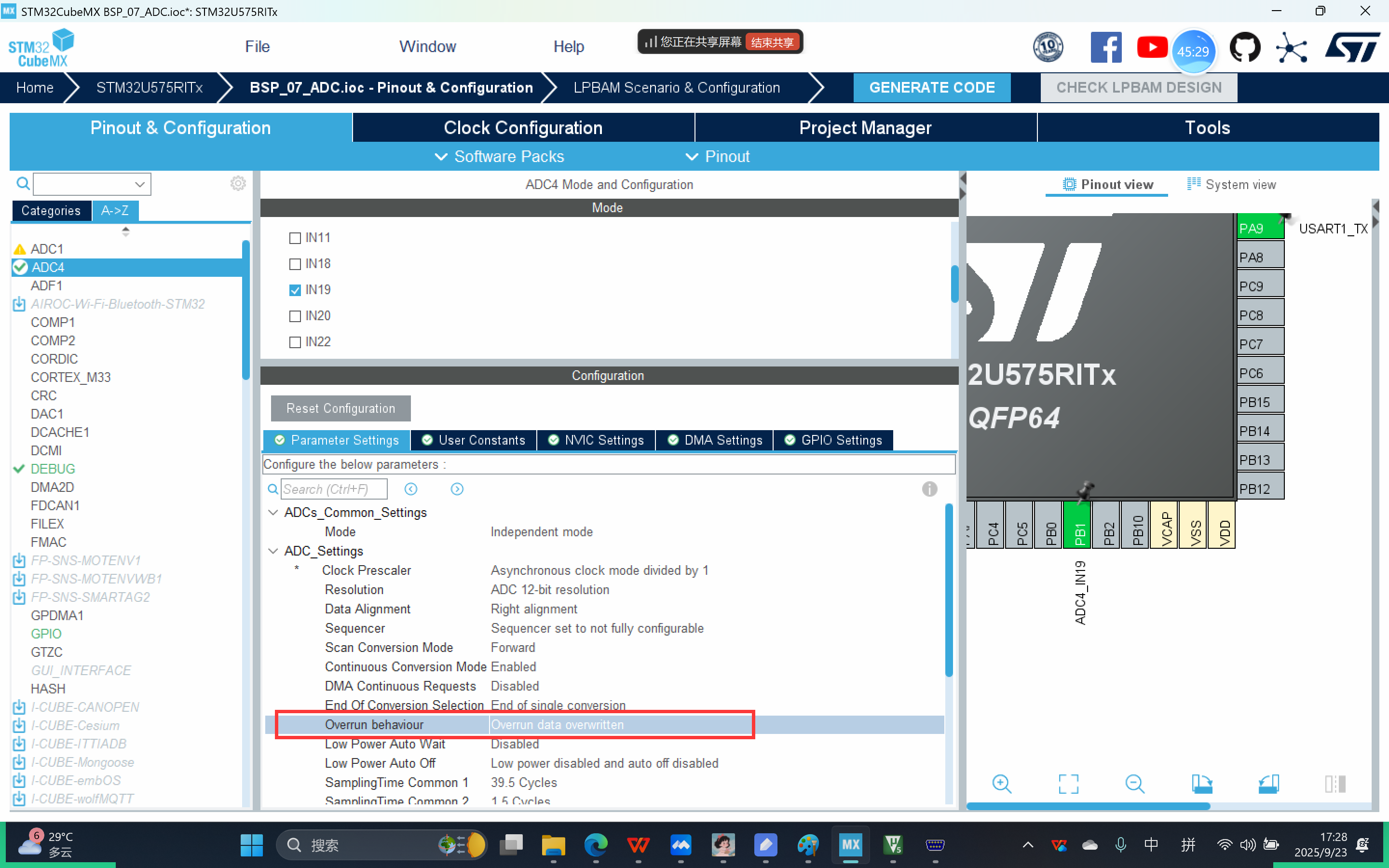
五、CubeMX配置
六、API接口
ADC采样和转化流程:
0、开启ADC采样校准模式
1、开启ADC采样转化功能
2、等待采样+转化结束,数字信号被存放到数据寄存器中
3、从数据寄存器中读取数字信号
4、通过模数转化公式,将数字信号转化为模拟信号,并串口打印ADC的采样校准要么在开启采样前,要么在关闭采用后
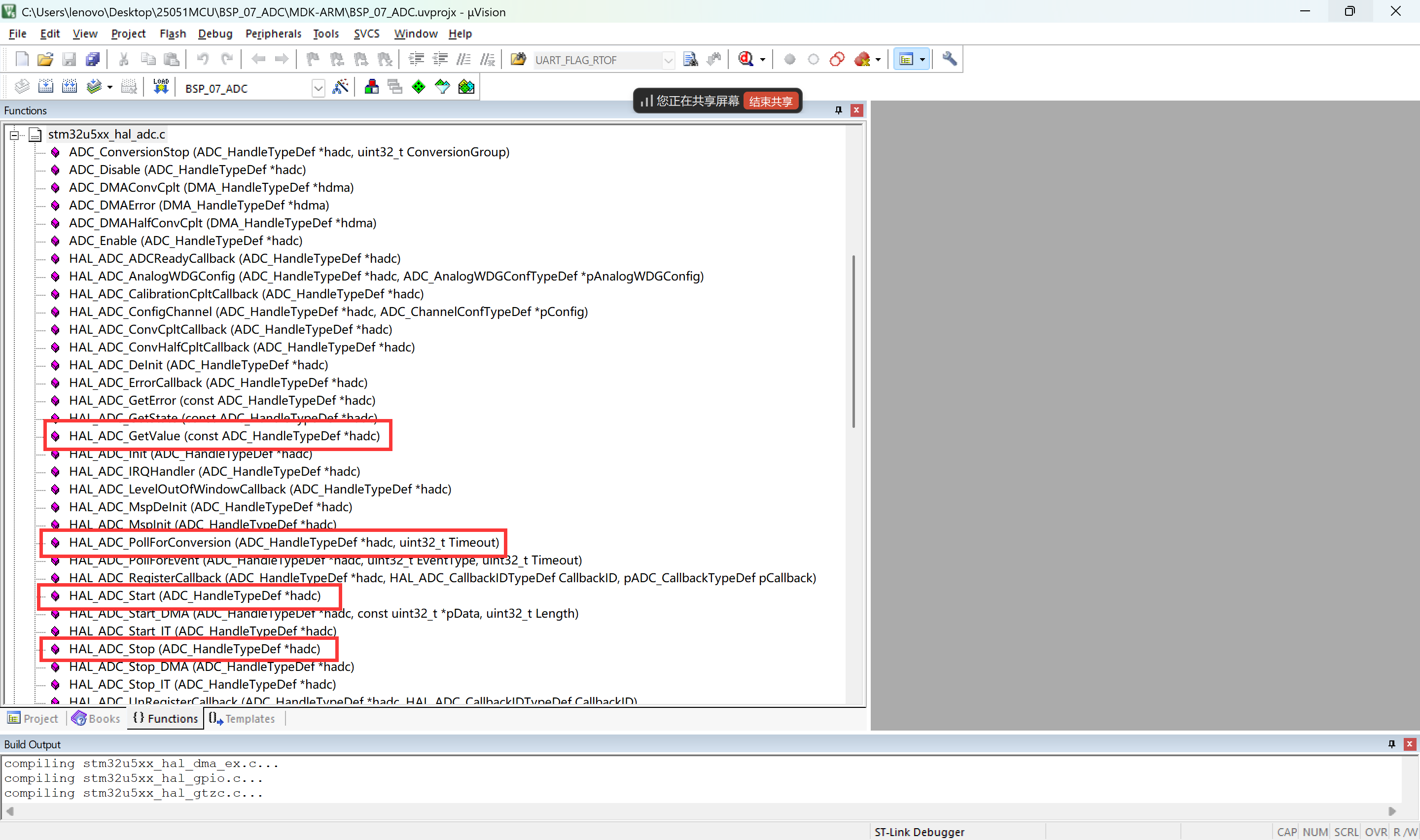
HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef *hadc)
功能:
HAL库提供的用于开启ADC采样转化功能的函数
参数:
habc:ADC4外设控制器的句柄
返回值:
函数执行成功,返回HAL_OK
函数返回失败,返回错误码
uint32_t HAL_ADC_GetValue(const ADC_HandleTypeDef *hadc)
功能:
HAL库提供的用于获取转化完毕的数字信号的函数
参数:
habc:ADC4外设控制器的句柄
返回值:
返回成功获取的数字信号
HAL_StatusTypeDef HAL_ADC_PollForConversion(ADC_HandleTypeDef *hadc,uint32_t Timeout)
功能:
HAL库提供的用于阻塞等待ADC采样+转化完毕,数据被存放到数据寄存器中的函数
参数:
habc:ADC4外设控制器的句柄
Timeout:超时检测时间,当前函数的最大阻塞时间返回值:
当ADC采样+转化数据完毕后,表示这个函数执行成功,函数执行成功,返回HAL_OK
当ADC采样+转化数据没结束时,此时这个函数处于阻塞状态
函数返回失败,返回错误码#define HAL_MAX_DELAY 0xFFFFFFFU
HAL_StatusTypeDef HAL_ADC_Stop(ADC_HandleTypeDef *hadc)
功能:
HAL库提供的用于关闭ADC采样转化功能的函数
参数:
habc:ADC4外设控制器的句柄
返回值:
函数执行成功,返回HAL_OK
函数返回失败,返回错误码
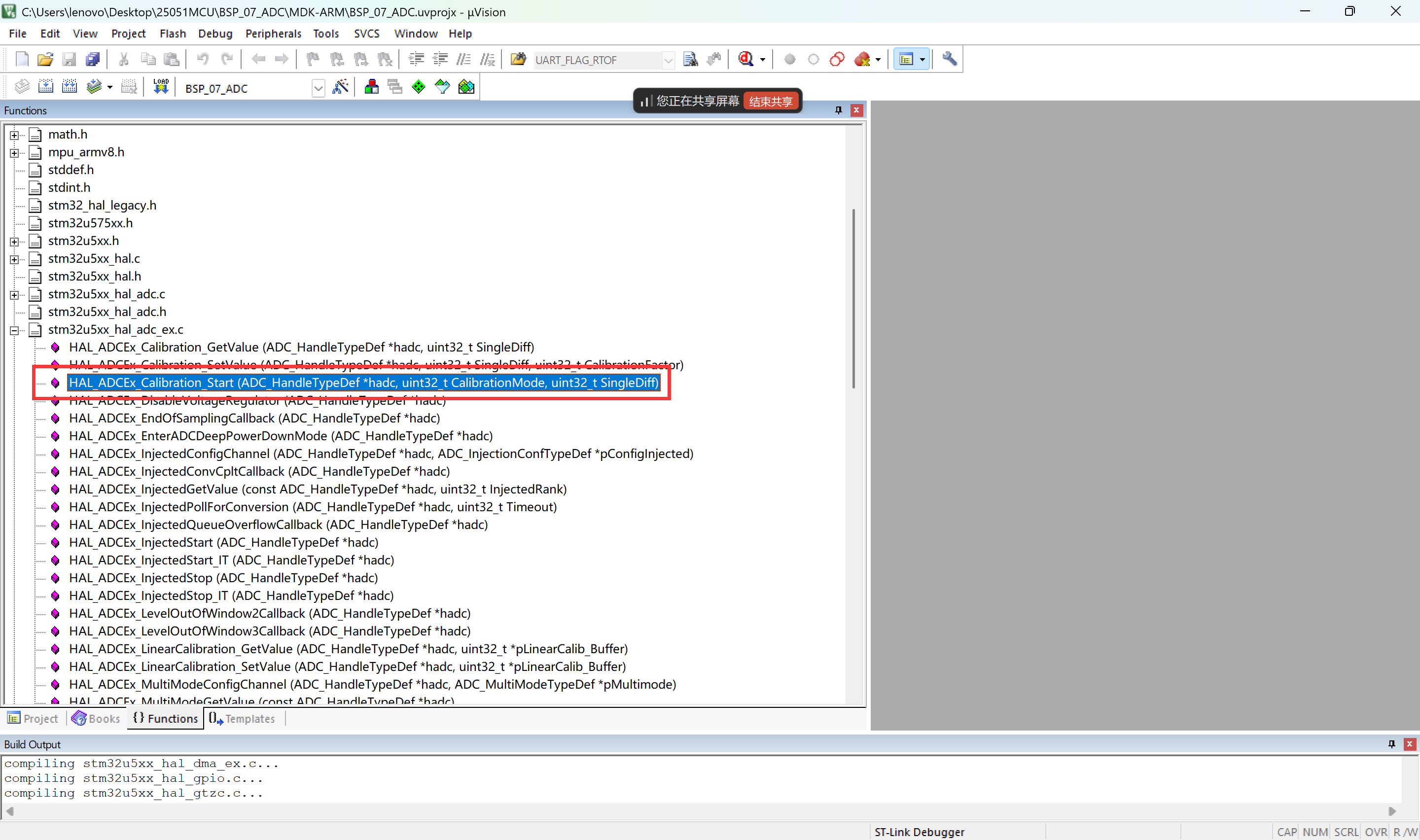
/*** @brief Perform an ADC automatic self-calibration
* Calibration prerequisite: ADC must be disabled (execute this
* function before HAL_ADC_Start() or after HAL_ADC_Stop() ).
* @param hadc ADC handle
* @param CalibrationMode Selection of calibration offset or
* linear calibration offset.
* @arg ADC_CALIB_OFFSET Channel in mode calibration offset
* @arg ADC_CALIB_OFFSET_LINEARITY Channel in mode linear calibration offset
* @param SingleDiff Selection of single-ended or differential input
* This parameter can be one of the following values:
* @arg @ref ADC_SINGLE_ENDED Channel in mode input single ended
* @arg @ref ADC_DIFFERENTIAL_ENDED Channel in mode input differential ended
* @retval HAL status
*/
HAL_StatusTypeDef
HAL_ADCEx_Calibration_Start
(ADC_HandleTypeDef *hadc, uint32_t CalibrationMode, uint32_t SingleDiff)
功能:
HAL库提供的用于校准ADC采样的函数(此函数只需要开启一次即可)
参数:
hadc:ADC4外设控制器的句柄
CalibrationMode:校准模式的设置
ADC_CALIB_OFFSET 偏移量校准方式(最基础的)
ADC_CALIB_OFFSET_LINEARITY 硬件线性化校准(高级的)
线性化校准比偏移量校准更准确,一般使用一些高精度仪器上SingleDiff:输入的模拟信号的选择
ADC_SINGLE_ENDED:输入单端信号(一个信号就代表一个电信号)
ADC_DIFFERENTIAL_ENDED:输入差分信号(两个信号代表一个电信号)返回值:
函数执行成功,返回HAL_OK
函数执行失败,返回错误码
七、代码编写
7.1单通道单次转化模式
cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//printf重定向
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,5);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the System Power */
SystemPower_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC4_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint32_t value_digital=0;
//uint32_t value_digital[2]={0};
float value_analog=0;
//stm32u575RIT6需要手动开启VDD电源管理单元的功能
HAL_PWREx_EnableVddA();
HAL_PWREx_EnableVddIO2();
//开启采样ADC4校准
HAL_ADCEx_Calibration_Start(&hadc4,ADC_CALIB_OFFSET,ADC_SINGLE_ENDED);
//HAL_ADC_Start(&hadc4);
//int i=0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//开启ADC的采样+转化功能
HAL_ADC_Start(&hadc4);
//等待ADC采样+转化完毕
HAL_ADC_PollForConversion(&hadc4,5);
//获取采样完毕的数字信号
value_digital=HAL_ADC_GetValue(&hadc4);
//通过模数转换公式,把获得电压转化为模拟信号
value_analog=value_digital*3.3/4096;
//串口打印
printf("digital=%d,analog=%.4f\n",value_digital,value_analog);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_0;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLMBOOST = RCC_PLLMBOOST_DIV4;
RCC_OscInitStruct.PLL.PLLM = 3;
RCC_OscInitStruct.PLL.PLLN = 10;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 1;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLLVCIRANGE_1;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Power Configuration
* @retval None
*/
static void SystemPower_Config(void)
{
/*
* Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral
*/
HAL_PWREx_DisableUCPDDeadBattery();
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */效果

cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//printf重定向
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,5);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the System Power */
SystemPower_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC4_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint32_t value_digital=0;
//uint32_t value_digital[2]={0};
float value_analog=0;
//stm32u575RIT6需要手动开启VDD电源管理单元的功能
HAL_PWREx_EnableVddA();
HAL_PWREx_EnableVddIO2();
//开启采样ADC4校准
//HAL_ADCEx_Calibration_Start(&hadc4,ADC_CALIB_OFFSET,ADC_SINGLE_ENDED);
//HAL_ADC_Start(&hadc4);
//int i=0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//开启采样ADC4校准
HAL_ADCEx_Calibration_Start(&hadc4,ADC_CALIB_OFFSET,ADC_SINGLE_ENDED);
//开启ADC的采样+转化功能
HAL_ADC_Start(&hadc4);
//等待ADC采样+转化完毕
HAL_ADC_PollForConversion(&hadc4,5);
//获取采样完毕的数字信号
value_digital=HAL_ADC_GetValue(&hadc4);
//通过模数转换公式,把获得电压转化为模拟信号
value_analog=value_digital*3.3/4096;
//串口打印
printf("digital=%d,analog=%.4f\n",value_digital,value_analog);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_0;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLMBOOST = RCC_PLLMBOOST_DIV4;
RCC_OscInitStruct.PLL.PLLM = 3;
RCC_OscInitStruct.PLL.PLLN = 10;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 1;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLLVCIRANGE_1;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Power Configuration
* @retval None
*/
static void SystemPower_Config(void)
{
/*
* Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral
*/
HAL_PWREx_DisableUCPDDeadBattery();
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */7.2单通道连续转化模式
cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//printf重定向
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,5);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the System Power */
SystemPower_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC4_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint32_t value_digital=0;
//uint32_t value_digital[2]={0};
float value_analog=0;
//stm32u575RIT6需要手动开启VDD电源管理单元的功能
HAL_PWREx_EnableVddA();
HAL_PWREx_EnableVddIO2();
//开启采样ADC4校准
HAL_ADCEx_Calibration_Start(&hadc4,ADC_CALIB_OFFSET,ADC_SINGLE_ENDED);
HAL_ADC_Start(&hadc4);//开启ADC连续转化模式后这一行代码只需要执行一次后续的ADC采样和转化会自动执行
//int i=0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//开启ADC的采样+转化功能
//HAL_ADC_Start(&hadc4);
//等待ADC采样+转化完毕
HAL_ADC_PollForConversion(&hadc4,5);
//获取采样完毕的数字信号
value_digital=HAL_ADC_GetValue(&hadc4);
//通过模数转换公式,把获得电压转化为模拟信号
value_analog=value_digital*3.3/4096;
//串口打印
printf("digital=%d,analog=%.4f\n",value_digital,value_analog);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_0;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLMBOOST = RCC_PLLMBOOST_DIV4;
RCC_OscInitStruct.PLL.PLLM = 3;
RCC_OscInitStruct.PLL.PLLN = 10;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 1;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLLVCIRANGE_1;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Power Configuration
* @retval None
*/
static void SystemPower_Config(void)
{
/*
* Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral
*/
HAL_PWREx_DisableUCPDDeadBattery();
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */7.3多通道连续转化模式
cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//printf重定向
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,5);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the System Power */
SystemPower_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC4_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
//uint32_t value_digital=0;
uint32_t value_digital[2]={0};
float value_analog=0;
//stm32u575RIT6需要手动开启VDD电源管理单元的功能
HAL_PWREx_EnableVddA();
HAL_PWREx_EnableVddIO2();
//开启采样ADC4校准
HAL_ADCEx_Calibration_Start(&hadc4,ADC_CALIB_OFFSET,ADC_SINGLE_ENDED);
HAL_ADC_Start(&hadc4);//开启ADC连续转化模式后这一行代码只需要执行一次后续的ADC采样和转化会自动执行
int i=0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
for(i=0;i<2;i++)
{
//等待ADC采样+转化完毕
HAL_ADC_PollForConversion(&hadc4,HAL_MAX_DELAY);
//获取采样完毕的数字信号
value_digital[i]=HAL_ADC_GetValue(&hadc4);
}
printf("%.4f\n",4*value_digital[0]*3.3/4096);
printf("%.4f\n",value_digital[1]*3.3/4096);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_0;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLMBOOST = RCC_PLLMBOOST_DIV4;
RCC_OscInitStruct.PLL.PLLM = 3;
RCC_OscInitStruct.PLL.PLLN = 10;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 1;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLLVCIRANGE_1;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Power Configuration
* @retval None
*/
static void SystemPower_Config(void)
{
/*
* Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral
*/
HAL_PWREx_DisableUCPDDeadBattery();
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */7.4练习:采集Vbat电源电压

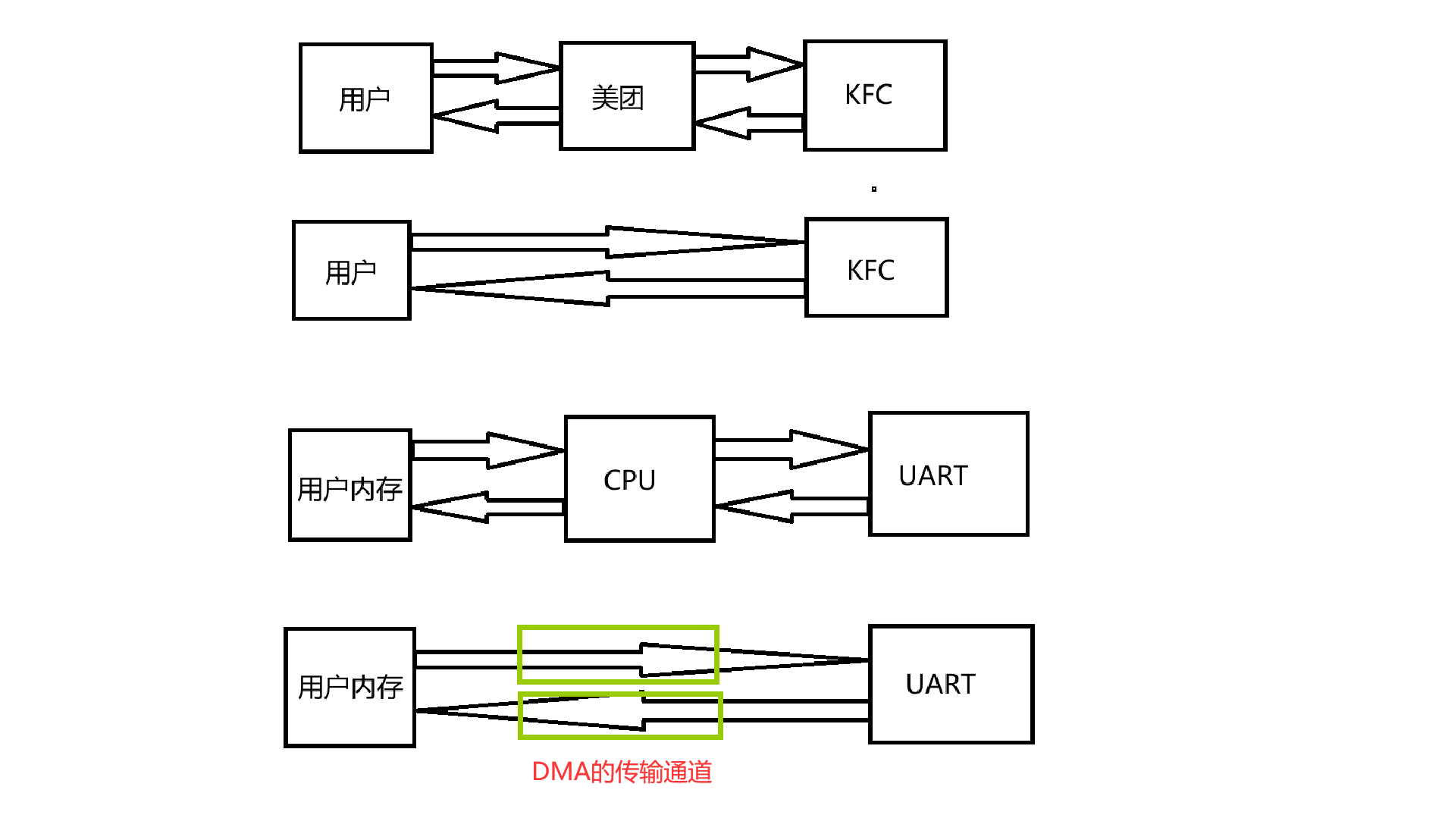
八、DMA 相关概念
GPDMA(General purpose direct memory access controler):直接内存访问(内存:实际的虚拟内存、外设控制器)
为什么需要使用DMA?
由于cpu具备高性能特点,正常需要设计到CPU的介入是关于数据的复杂度处理相关的逻辑
此时,一些简单的数据传输,如串口数据传输、ADC采样后的数据传输,可以不需要CPU的介入
也就是,如果使用DWA,DMA会开辟一片通道(16个独立通道),专门用于简单的数据传输,这些数据就不需要让CPU来调度传输