近几年人形机器人赛道热度陡升,在现实环境中,机器人已经能够完成跑跳、后空翻等炫技动作。然而,一旦进入长时间连贯动作或复杂地形,多数机器人仍难逃站不稳、摔倒、卡顿等尴尬状况,动作稳定性成为机器人从炫技走向实用的隐形门槛。这些问题的核心在于,机器人如何获得像人类一样流畅、协调的运动能力?
当前机器人训练方法论正借鉴大语言模型的成功路径:先通过大规模数据预训练掌握基础技能,再通过后期优化实现行为能力的自主进化。而在训练前期,"高质量、高保真的人类动作数据"已成为最稀缺的关键资源。
动作捕捉技术通过精密传感器精确记录人类运动轨迹,成为获取高质量动作数据的黄金标准。这些数据经过二次开发后,可直接应用于人形机器人、灵巧手或机械臂的动作训练,让机器能够学习并模仿人类的运动模式,从根本上优化控制算法,提升动作的精准度、灵活性和自然度。
针对机器人训练的特殊需求,开发了专门优化的动作捕捉解决方案,具备高精度、低延迟、强抗遮挡能力和室外场景适应性,为机器人训练提供全面数据支持,虚拟动力基于全系惯性动捕产品:
l 全身27节点动捕设备VDSuitFull
l 全身31节点设备DreamsCapX1
l 双手16节点数据手套mHandPro
l 7摄像头无穿戴动捕方案
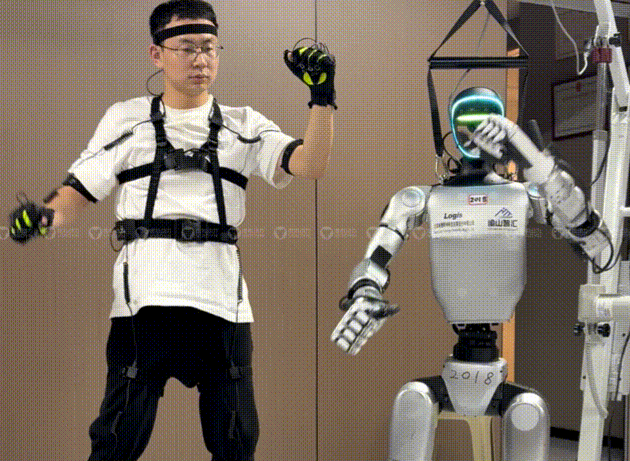
可提供完整的动作训练与数据采集能力;拥有大规模训练数据创建体系,支持舞蹈、基础肢体运动、精细操作、场景化任务、交互协作等各类高质量动作的批量采集;创新性的机器人示教与遥操作能力,通过人体动作直接控制机器人行为,并可配置VR头显提升操作的直观性与灵活性。
对于人形机器人开发与生产企业而言,选择专业的动捕设备与数据服务,不仅能大幅提升机器人的训练效率,无需再花费大量时间手动标注动作数据,借助动作捕捉设备可快速获取高保真数据;更能降低机器人研发的试错成本,基于精准数据训练的机器人,动作控制更稳定,减少了因动作失误导致的设备损耗。最终,通过动作捕捉技术的赋能,人形机器人的动作将更拟人、更可靠,加速其在各个行业的落地应用,推动整个机器人产业的高质量发展