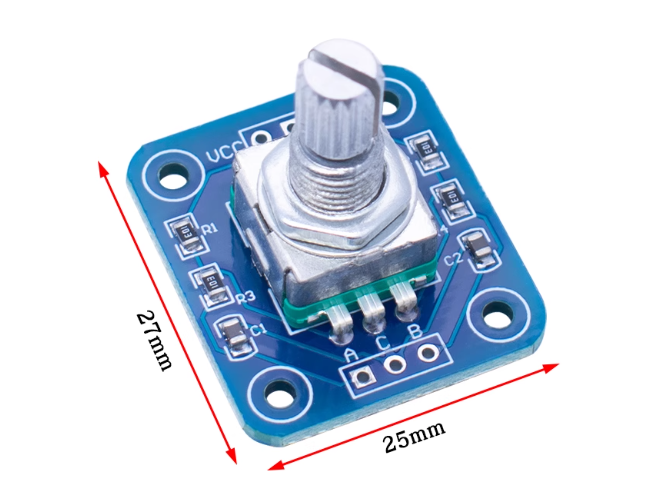
大家好,今天我们来深入探讨一下旋转编码器这个非常实用的单片机外设模块。旋转编码器在工业控制、机器人技术、精密测量和人机交互等领域得到了广泛应用。通过它,我们能够精准地检测旋转轴的转动角度和方向,是实现精准控制的关键组件。
1. 旋转编码器是什么?
旋转编码器是一种将旋转运动转换为电脉冲信号的传感器。它通常由光栅盘 和红外发射/接收器构成。当旋转轴转动时,光栅盘随之转动,红外光信号被交替阻挡或通过,从而产生一系列的电脉冲信号。这些脉冲信号反映了旋转轴的相对运动。
常见的旋转编码器有两种类型:
- 增量式编码器:输出的脉冲信号表示相对变化量,无法直接得出旋转的绝对位置。
- 绝对式编码器:可以直接输出旋转轴的绝对位置。
本文将重点讨论增量式编码器,它的应用更为广泛,能够用于检测旋转的方向和步数。
2. 旋转编码器的工作原理
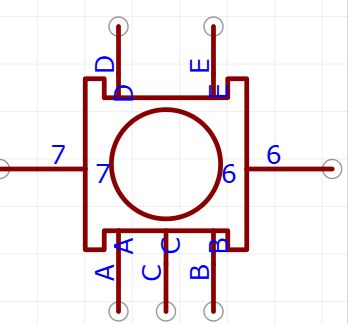
增量式旋转编码器的核心原理是通过两路A相 和B相的方波信号,来判断旋转的方向和计算旋转步数。具体来说:
- A相和B相:两路信号之间的相位差为90°,通过检测哪一相先跳变(上升沿或下降沿),可以判断旋转方向。
- Z相(索引信号):每当旋转轴完成一圈时,Z相会输出一个脉冲,用于定位旋转的零点,消除累计误差。
以下是旋转编码器的输出信号示意图:
3. 旋转编码器的应用
旋转编码器在多个领域都有广泛应用,特别是在以下几个方面:
- 工业控制:用于伺服电机和步进电机的速度和位置反馈。
- 人机交互:比如音量旋钮、车载中控旋钮等,通过旋转编码器来识别用户输入。
- 精密测量:用于精确测量微小位移。
- 机器人技术:用于机器人关节的精确控制,确保动作的准确性。
4. 旋转编码器的参数
了解旋转编码器的一些基本参数非常重要,这些参数直接影响编码器的工作精度和性能:
- 分辨率(PPR):每旋转一圈输出的脉冲数,分辨率越高,测量精度越高。例如,100 PPR的编码器每旋转一圈会输出100个脉冲。
- 相数:常见的是2相输出(A相和B相),有些编码器会提供更多的相位输出。
- 输出类型:包括集电极开路、推挽输出和差分线驱动输出等,适应不同的应用环境。
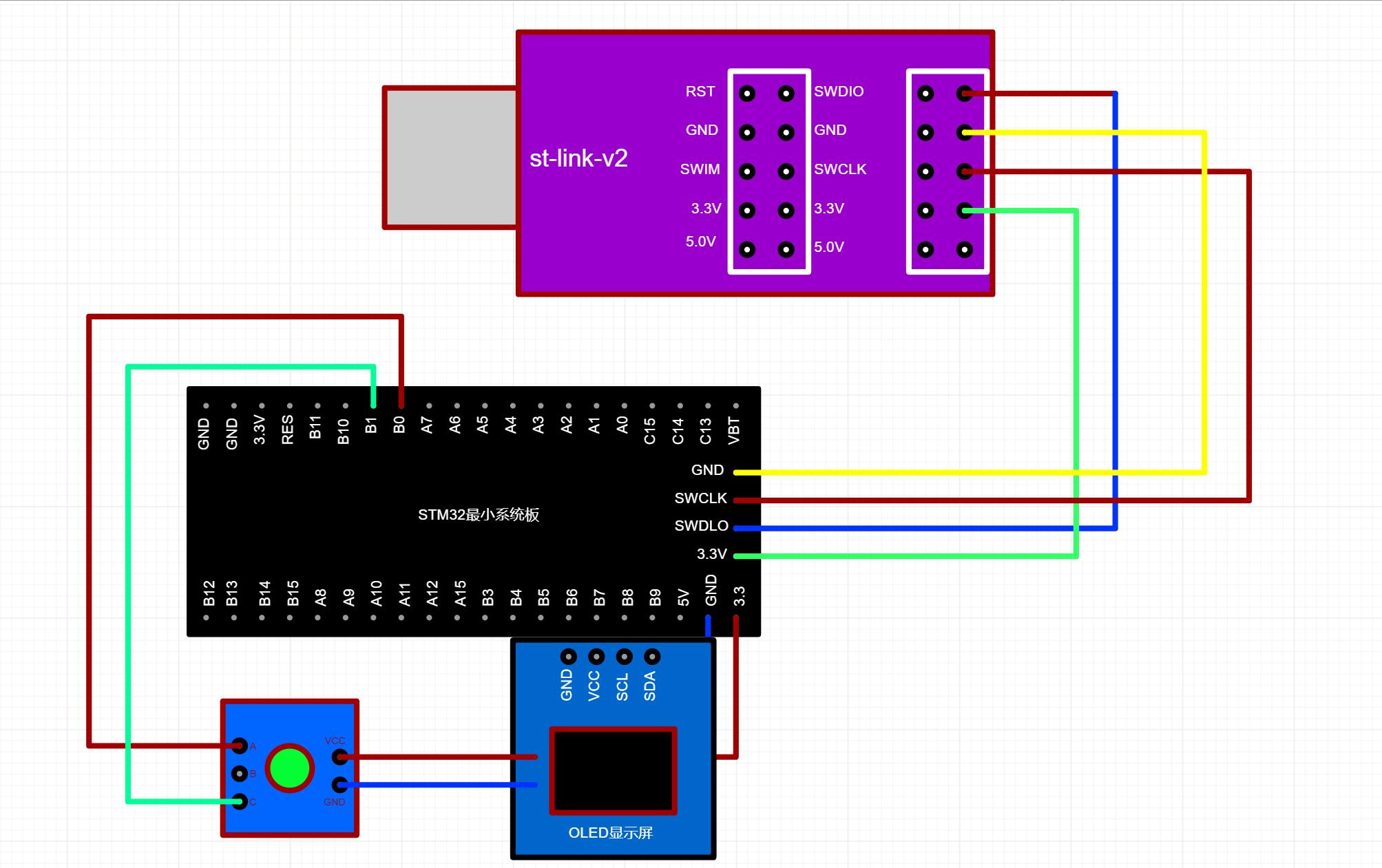
5. 旋转编码器硬件连接
在单片机系统中,旋转编码器的硬件连接非常简单。下面是以STM32为例的硬件连接图:
| 旋转编码器 | STM32单片机 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| A相 | B0 |
| B相 | B1 |
通过连接这些基本线路,STM32单片机便能读取到旋转编码器的信号,并进行处理和显示。
6. 示例代码
以下是一个简单的示例代码,展示如何使用STM32读取旋转编码器的信号,并显示旋转次数。
代码说明:
- 配置A相和B相的输入引脚。
- 使用外部中断检测A相和B相的信号变化。
- 计算旋转的步数和方向。
- 将结果通过OLED显示屏输出。
c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count; //全局变量,用于计数旋转编码器的增量值
void Encoder_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB0和PB1引脚初始化为上拉输入
/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);//将外部中断的0号线映射到GPIOB,即选择PB0为外部中断引脚
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);//将外部中断的1号线映射到GPIOB,即选择PB1为外部中断引脚
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; //选择配置外部中断的0号线和1号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //选择配置NVIC的EXTI0线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //选择配置NVIC的EXTI1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //指定NVIC线路的响应优先级为2
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
}
int16_t Encoder_Get(void)
{
/*使用Temp变量作为中继,目的是返回Encoder_Count后将其清零*/
/*在这里,也可以直接返回Encoder_Count
但这样就不是获取增量值的操作方法了
也可以实现功能,只是思路不一样*/
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
/**
* 函 数:EXTI0外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET) //判断是否是外部中断0号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //PB0的下降沿触发中断,此时检测另一相PB1的电平,目的是判断旋转方向
{
Encoder_Count --; //此方向定义为反转,计数变量自减
}
}
EXTI_ClearITPendingBit(EXTI_Line0); //清除外部中断0号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
/**
* 函 数:EXTI1外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) == SET) //判断是否是外部中断1号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) //PB1的下降沿触发中断,此时检测另一相PB0的电平,目的是判断旋转方向
{
Encoder_Count ++; //此方向定义为正转,计数变量自增
}
}
EXTI_ClearITPendingBit(EXTI_Line1); //清除外部中断1号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
// 主程序
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num; //定义待被旋转编码器调节的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Encoder_Init(); //旋转编码器初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Num:"); //1行1列显示字符串Num:
while (1)
{
Num += Encoder_Get(); //获取自上此调用此函数后,旋转编码器的增量值,并将增量值加到Num上
OLED_ShowSignedNum(1, 5, Num, 5); //显示Num
}
}