对实习过程中用到的大模型的原理进行总结
目录
- 1、SAM
-
- [1.1 SAM1](#1.1 SAM1)
- [1.2 SAM2](#1.2 SAM2)
- [2 Qwen](#2 Qwen)
1、SAM
1.1 SAM1
面试回答
首先在结构上,三大核心模块:Image Encoder基于MAE预训练的ViT架构 ,提取为1/16下采样的64×64图像特征 ,提供全局语义基础 ;Prompt Encoder 针对点、框、掩码三类提示分别编码------点/框通过坐标归一化、正弦余弦位置编码叠加少量可学习类别向量生成稀疏特征 ,掩码通过下采样与卷积生成密集特征 ,实现多提示统一转化;Mask Decoder则融合图像特征、提示特征及位置编码 ,借助Transformer注意力机制与可学习的掩码/IoU预测Token,输出4个不同粒度的二值化掩码及对应IoU分数,最终完成精准分割。它的输入是:「(图像 emb + 密集提示 emb) (Token 序列 + 稀疏提示 emb) 」
结构
三个模块:Image Encoder,Prompt Encoder和Mask Decoder

1. Image Encoder(图像编码器):提取全局图像特征,为分割提供"图像基础信息"
- 核心职责:将输入图像转化为具有全局语义信息的特征图,是后续分割的"图像理解基础"。
- 输入处理:为保证输入一致性与推理效率,对任意尺寸图像做标准化预处理------先等比例缩放至"长边=1024像素",再减均值、除方差后补0至1024×1024。
- 核心技术 :
- 基于MAE预训练的ViT架构(Vision Transformer),利用ViT的全局注意力优势捕捉长距离语义关联;
- 输出:生成1/16下采样的64×64特征图(即Image Embedding),通道数通常为768/1024,既保留足够空间细节(支撑细粒度分割),又压缩维度降低后续计算成本。
掩码自编码器(masked autoencoders, MAE)是视觉任务中的灵活的自监督学习器。MAE思路很简单:对输入图像的patches序列随机掩码(遮挡),然后尝试重建出这些被遮挡的像素。
2. Prompt Encoder(提示编码器):将多类用户提示转化为统一特征,实现"灵活交互"
-
核心职责:适配点、矩形框、掩码3类主流提示,将其编码为模型可理解的特征向量,是SAM"通用交互"的核心------解决"不同类型提示如何统一输入模型"的问题。
-
分类型编码逻辑(重点,体现设计细节) :
提示类型 输入形式 核心编码步骤 可学习参数亮点 点(Point) 坐标(x,y)+类别(前景/背景) 1. 坐标移至像素中心→归一化到-1,1; 2. 正弦余弦位置编码(不可学习,保证空间信息); 3. 叠加"前景/背景可学习向量"(仅2个可学习参数,轻量化) 仅类别向量可学习,兼顾效果与效率 框(Box) 左上/右下角点坐标 1. 复用点的"坐标归一化+正弦余弦编码"; 2. 叠加"左上/右下角点可学习向量"(区分角点类型) 仅角点向量可学习,与点编码复用逻辑 掩码(Mask) 二值化掩码(1024×1024) 1. 先下采样4倍→再通过2层Conv2D-LN-GeLU下采样4倍(总下采样16倍); 2. 无掩码时用"可学习向量复制填充" 卷积层可学习,适配密集提示 -
输出:两类特征统一输出------点/框对应"稀疏特征向量",掩码对应"64×64密集特征图",为后续融合做准备。
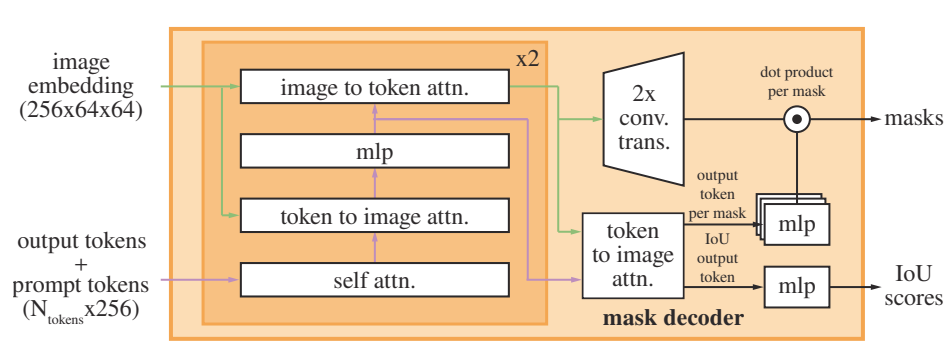
3. Mask Decoder(掩码解码器):融合图像与提示特征,输出高精度分割结果
- 核心职责:将"图像特征(Image Embedding)"与"提示特征(Prompt Embedding)"融合,最终输出对应分割掩码及质量分数,是SAM"精准分割"的核心。
- 输入构成:4类关键输入------①Image Encoder输出的图像特征;②Prompt Encoder输出的稀疏/密集提示特征;③图像特征的位置编码(补充空间信息);④2个可学习Token(分别用于"掩码预测"和"IoU分数预测")。
- 核心技术 :
- 特征融合:通过Transformer注意力机制,让提示特征"引导"图像特征聚焦于目标区域(比如点提示会让图像特征在对应位置权重升高);
- 多粒度输出:为平衡"分割精度"与"场景适配性",每次推理输出4个掩码(对应不同分割粒度),同时通过MLP输出每个掩码的IoU分数(供用户选择最优结果);
- 输出:4个1024×1024二值化掩码(与原图尺寸一致)+4个IoU分数(衡量掩码与真实目标的重合度)。
1.2 SAM2
面试回答:
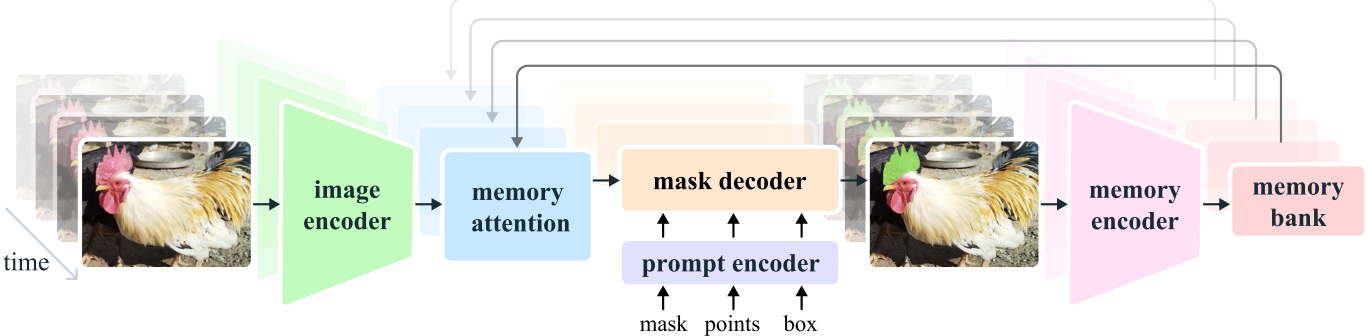
SAM2 将 SAM 的可提示分割从图像扩展到视频。
图像编码器:使用 MAE 预训练的 Hiera 层次化 ViT,结合 FPN 生成 stride 4--32 的多尺度特征,并以流式方式处理长视频。
记忆机制:通过 Memory Encoder 将每帧预测的掩码与图像特征编码为记忆,存入 Memory Bank(包含最近帧的空间特征和目标语义向量)。解码时,Memory Attention 将当前帧与历史记忆做交叉注意力(使用 FlashAttention2 加速),并加入时间位置嵌入以建模短期运动。
Prompt Encoder:与 SAM1 相同,支持点、框、掩码提示。
Mask Decoder:采用 双向 Transformer 融合当前帧特征、提示和历史记忆,输出多个候选掩码及其 IoU 分数,并新增 可见性预测头 以判断目标在当前帧是否可见。
这样 SAM2 实现了"任意帧提示---全视频掩码自动传播---多轮交互修正"的 Promptable Visual Segmentation。
结构
-
任务扩展 :从静态图像的可提示分割扩展到 Promptable Visual Segmentation (PVS) ------在任意帧接收点击/框/掩码提示,自动生成该目标在全视频的掩码序列(masklet),支持用户多轮交互修正。
-
图像编码器 :采用 MAE 预训练的 Hiera (层次化 ViT),并通过 FPN 多尺度融合 (stride 4/8/16/32),在保证高分辨率细节的同时流式处理视频,每帧只需一次前向。
-
记忆机制:
- Memory Encoder:将当前帧图像特征与预测掩码融合成记忆;
- Memory Bank:FIFO 队列保存最近 N 帧的空间特征与目标语义向量(object pointer),并对提示帧单独维护队列;
- Memory Attention :当前帧自注意力 + 与记忆做交叉注意力,使用 FlashAttention 2 加速,并加入时间位置嵌入建模短期运动。
-
Prompt Encoder:沿用 SAM1 设计,支持点/框/掩码提示。
-
Mask Decoder:
- 采用 双向 Transformer 块,输入 = 当前帧特征 + 历史记忆 + 当前提示;
- 输出多候选掩码及 IoU 分数;
- 额外 可见性预测头,判断当前帧是否能看到目标。
-
训练策略:在图像+视频数据上联合训练,随机帧接收提示并顺序预测真实掩码;支持交互式点击校正。
2 Qwen
引文:
Qwen2VL
面试回答
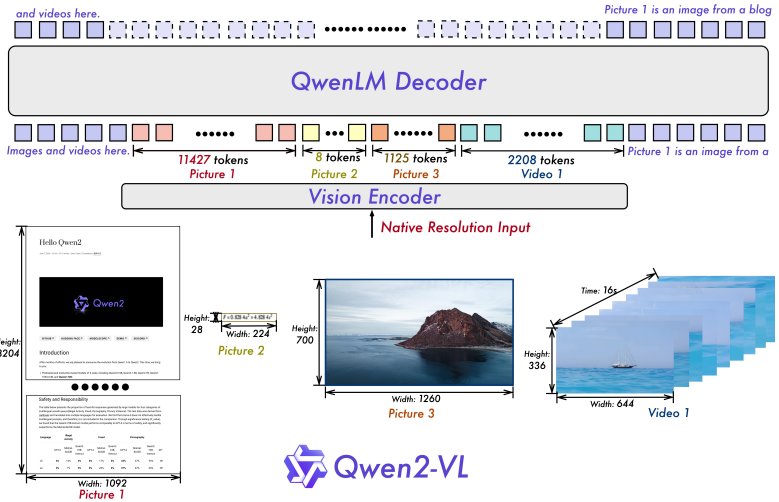
Qwen2-VL 是通义千问在 Qwen2 LLM 上扩展的视觉-语言模型,能够同时处理文本、图像乃至视频。整体由视觉编码器和语言模型两部分构成。视觉侧是基于 ViT 的 Transformer,使用 3D 卷积做 patch embedding 并引入二维 RoPE,最后通过 PatchMerger 将高维视觉 token 聚合成 3584 维,直接送入大语言模型,没有复杂的连接器。
语言侧沿用 Qwen2 的 decoder-only 架构,但关键加入了多模态三维 RoPE,把文本的时间位置与图像的高宽坐标统一编码。
训练分三步:先对 ViT 进行 600B 图文 token 预训练,再用约 1.4T token 进行全参数多模态联合训练,最后做 ChatML 格式的多模态指令微调。
总体结构
- 视觉编码器(Qwen2VisionTransformerPretrainedModel)
- 基于 ViT,但做了两点改造:
- PatchEmbed:使用 3D 卷积将图像(或视频帧序列)划分成 2D patch,并在时间维做 stride=2,下采样时自然融入时间信息。
- 二维 Rotary Positional Embedding (2D-RoPE):在高、宽两个方向分别注入旋转位置编码,为后续多模态三维位置扩展打基础。
- 由 32 层 Vision Transformer Block 组成,内部是标准多头自注意力 + MLP。
- PatchMerger :末端做轻量的 token 聚合,将视觉 token 数降到语言模型可接受的规模(3584 维),直接送入大语言模型。
➜ 特点:没有复杂的"Connector"桥接层,视觉特征几乎直接进入 LLM,这与早期 ViLT 的思路类似,说明大语言模型对视觉 embedding 的兼容能力已大幅提升。
- 基于 ViT,但做了两点改造:
- 语言模型(Qwen2VLModel)
- 主体与 Qwen2 LLM 相同:28 层 decoder-only Transformer。
- 关键改造 :
- 三维 Rotary Position Embedding (M-RoPE):在文本的时间维度基础上,视觉 token 还同时编码 height、width 信息,实现文本、图像、视频三模态统一位置表示。
- 注意力层做了 Key/Value 降维(k/v dim 512 < q dim 3584),降低显存和计算。
- 采用 RMSNorm + SiLU 激活,保持稳定与收敛速度。
- 输出端是标准的 LM Head,用于下一 token 预测。
训练三阶段
-
ViT 预训练
- 600B 图文 token,单独训练视觉编码器。
- LLM 参数初始化自 Qwen2,视觉端基于 DFN ViT 并替换为 2D-RoPE。
- 目标是让视觉编码器具备高质量语义表示。
-
全参数联合训练
- 额外约 800B 混合 token:图文问答、多任务、纯文本。
- 解锁所有参数,仅对文本 token 提供监督,提升多模态融合能力。
- 累计处理约 1.4T token。
-
指令微调(Instruction Tuning)
- 使用 ChatML 格式。
- 数据涵盖纯文本、多模态会话、文档解析、多图比较、视频理解等。
- 提升模型在开放式多轮对话、任务执行中的指令遵循与鲁棒性。