摘要:力觉传感器破解机器人精准操控与适应难题
导语:在机器人迈向真实场景的过程中,"如何下手"与"下手轻重"成为关键难题。蓝点触控将航天级力觉传感技术产业化,为机器人安装"触觉神经",实现从"盲操作"到"灵巧操作"的跨越,推动国产核心部件打破垄断、赋能全球机器人创新。
在北京亦庄WRC的展台上,一个个粉底盒、水瓶盖大小的金属装置安静陈列,却吸引了众多专业观众驻足询问。"比如机器人要跟您握手,力小了握不住,力太大会把人握疼,怎么掌握这个力?全都要靠力传感器。"蓝点触控(北京)科技有限公司(以下简称"蓝点触控")创始人刘吴月解释道。这些不起眼的小器件,正是决定机器人能否精准作业的核心部件------六维力传感器。在机器人产业界,力觉感知技术已成为衡量机器人性能的关键指标,直接决定着机器人是"大老粗"还是能胜任"精细活"。
蓝点触控成立于2019年,诞生于中国航天领域深厚的力传感技术积累,"中国航空航天研究六维力传感器已经有70多年的积累,我们核心团队来自航天领域,相当于站在巨人的肩膀上发展。"刘吴月如此描述公司的技术渊源。源自中国航天空气动力技术研究院,具备深厚的军工与航天技术背景的蓝点触控致力于将航天级力传感技术转化为可规模化、低成本应用的工业与消费级产品。通过自主研发的四大技术平台------弹性体结构设计、嵌入式硬件电路、力控解耦算法与六维同步校准技术,不仅打破了国外厂商长期以来的技术垄断,更推动中国力觉传感器走向全球市场竞争的前沿。

从"盲操作"到"灵巧操作"
随着机器人技术从实验室走向真实场景,其在复杂环境中的精准控制与自适应能力成为制约大规模商用的关键瓶颈。传统机器人多依赖视觉系统完成定位与识别,但在涉及力交互的实际任务中------如精密装配、柔性抓取、人机协作等,纯视觉方案就显得力不从心了。正如人不仅需要眼睛看,还需用手触摸、感知力度,机器人力觉传感器的缺失,一度使其在真实世界的应用中表现得"笨拙"而"不安全"。正是在这一背景下,力觉传感技术逐渐走向舞台中央,成为提升机器人操作精度与环境适应性的核心部件。
力觉传感器的出现,从根本上改变了这一局面。它就像是机器人的"触觉神经",能够实时检测并反馈机器人与环境之间的力和力矩信息,使机器人具备"感知力量"的能力。刘吴月用一个生动的比喻解释其价值:"只有视觉的机器人,如同做手术的医生只看影像下刀------他知道位置,却不知道轻重。"而力觉传感器则让机器人有了"手感",从而实现从"盲操作"到"灵巧操作"的跨越。
以装配作业为例,将轴装配到孔里的操作要求精度达0.05毫米,相当于一根头发丝的粗细。传统方法依赖高精度定位系统,成本高昂且稳定性差。蓝点触控的解决方案则是"视觉粗定位+力觉精操作":视觉系统提供大致位置,精细操作完全依靠手的力觉完成,这样既降低成本,又提高了操作的适应性。
以人形机器人为例,在具身智能系统中,力觉传感器是机器人的核心力觉感官。通过应变或压电效应,它能够将机械臂末端、关节或足底等部位的环境作用力转化为电信号,实时反馈至控制系统。这一过程让机器人实现操作精准调控、碰撞保护及自适应运动控制等功能。"当机器人真正下场交互,任何接触场景都很难仅靠视觉定位达到高精度要求。"刘吴月指出,"这个时候就非常典型地需要类人方式操作,即视觉进行粗定位,力觉完成精细操作。"
这一认知的转变在2024年变得尤为明显。当人形机器人从演示、导览走向实际工作场景时,行业发现仅靠视觉无法满足高精度接触操作需求。刘吴月解释道:"机器人搭起来之后,才发现擦桌子、收盘子这些简单的动作,误差三五毫米根本完成不了。原来大家在理论上认为视觉定位很准,结果关节的间隙和变形导致这个误差是随机的,需要通过力觉模拟人的动作。"
四大平台型技术实现精准力控
六维力传感器的研发是一项跨学科的系统工程,涉及机械结构、材料科学、电子电路、信号处理及算法软件等多个领域。国际厂商长期垄断这一市场,尤其在高精度、高可靠性产品方面设置了一系列技术壁垒。蓝点触控通过四大自主研发的技术平台,实现了从技术追赶到局部超越的突破。
高性能弹性体迭代设计,通过结构优化在有限空间内实现高刚度、低串扰与强过载能力,这是传感器能否精准感力的结构基础;低噪声嵌入式硬件电路,确保在高速动态作业中也能提取纯净的应变信号,为后续处理提供高质量数据输入。算法层面,高效力控解耦技术运用深度学习等现代方法,将多个维力的耦合信号快速分离,输出高精度的六维力与力矩信息;高精度六维同步校准技术则通过光学引导与多维度加载设备,保证每一支传感器出厂时都达到统一的精度标准。四大技术协同作用,使得蓝点触控的六维力传感器在精度上可以达到0.1%FS,响应频率高达10kHz,体积和重量较传统产品降低90%和80%以上,真正实现了"无感化"集成安装。
商业化方面,蓝点触控已构建完善的产品矩阵:面向人形机器人开发了LA六维力和LC关节扭矩系列;针对传统工业领域推出LB通用六维力、LD关节扭矩和LE拉压力系列,这种产品布局使公司能够同时服务于两大增长市场。

规模化生产带来成本优势,"力传感器本质上是一个零部件,零部件一定要尊重其发展规律,前期凭借技术优势快速开拓市场,但最终要通过规模化来实现长期可持续发展。"刘吴月强调。这一策略成效显著:蓝点触控连续三年每年销售收入翻倍,已实现正向现金流,跨越了创业企业的生死线。数据显示,蓝点触控在人形机器人六维力传感器领域仅2025年上半年就有多个单一客户六维力传感器出货量达到千台量级。据刘吴月介绍,蓝点触控在机器人关节力矩传感器方面,蓝点触控2024年出货量5万余套,2025年上半年出货量超7万套,位于该领域国内总出货量前列。
人形机器人核心零部件的机会一定在中国
2025年被业界称为人形机器人的量产元年。据IDC报告,2024年中国人形机器人商用销售出货量约2000台,超出行业预期。刘吴月预估,按照当前趋势,2025年人形机器人的实际出货量可能达到5000到10000台量级。
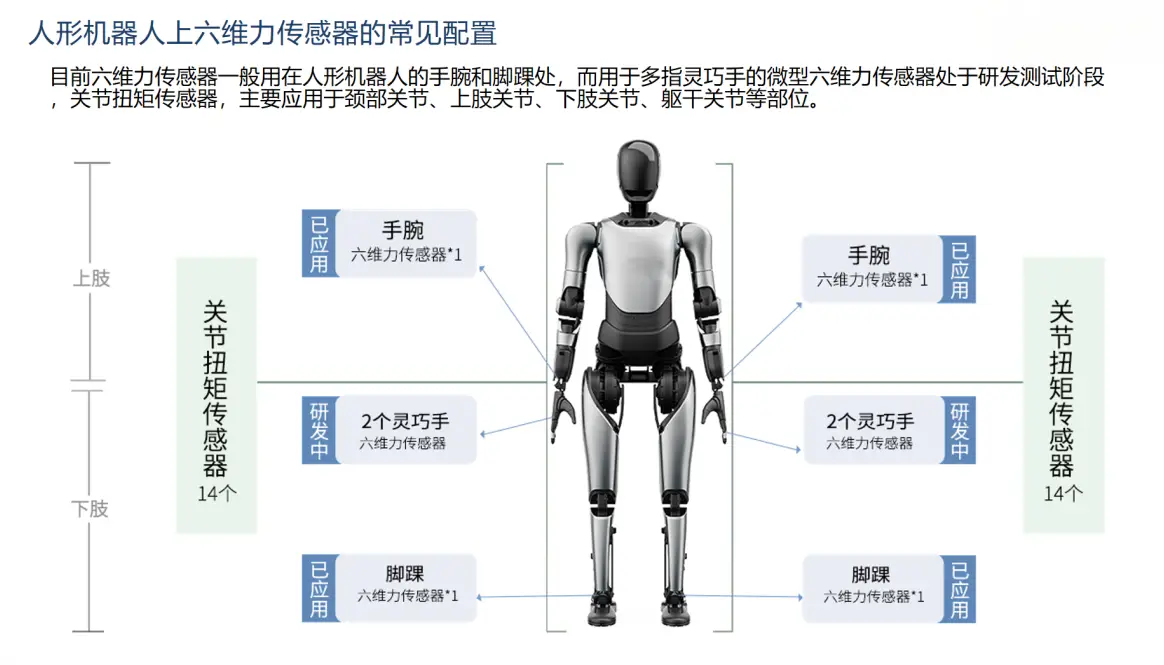
这一增长趋势为上游核心零部件企业带来巨大机遇。人形机器人通常需要配备手腕、脚腕4个六维力传感器及28个关节力矩传感器,在量产状态下,这些传感器约占整机物料成本的15%。
随着人形机器人从实验室走向实际应用,力觉传感器的重要性日益凸显。刘吴月观察到,行业正从末端加装六维力传感器向每个关节加装关节力传感器演进:"因为六维力传感器加装速度最快,而关节力传感器响应速度表现更好。"
蓝点触控近期完成的近亿元B轮融资将重点投向三大技术方向:持续加码小尺寸、超高精度、高带宽力觉传感器的底层研发;组建欧洲、美洲本地化技术商务团队,加速全球化市场渗透;面向细分场景推出模块化解决方案。蓝点触控在力觉算法、MEMS微纳加工、封装标定等环节形成闭环,技术壁垒高;下游人形机器人正处于零到一的行业拐点,对六维力传感器需求呈指数级增长。
国际化布局是蓝点触控下一阶段重点。刘吴月判断:"人形机器人零部件的机会一定是在中国,全球的人形机器人零部件'中国造',一定是必然的结果。"他给出三点依据:国内已形成对高性能产品的巨大消费需求;中国拥有强大的供应链优势;国内形成了良好的创新土壤与迭代创新环境。在供应链方面,我国企业展现惊人效率:"我们现在加工东西,能够做到上午发图纸,零部件晚上就拿回来了,这样的研发速度之下,试错成本会下降,竞争力就强很多。"刘吴月说道。
蓝点触控的发展印证了中国在核心传感器领域的突破能力。从航天技术出发,通过六年时间,公司完成了技术转化、产品迭代和规模化量产的全过程,在曾经被国际巨头垄断的高端力传感器市场实现领先。
随着人形机器人产业进入量产元年,力传感器作为机器人感知物理世界的核心媒介,其重要性将持续提升。而蓝点触控凭借先发优势和规模化能力,已经在这场决定未来机器人智能水平的竞赛中占据了有利位置。"爆发式增长才刚刚开始,指数级的增长还在后边",刘吴月对行业前景如此判断,并预测全球人形机器人领域的力传感器市场将达到百亿级规模,而中国企业会是这个市场的引领者。