本文介绍ROS1下 unitree + vlp16 + cartographer的 自主定位+避障+探索
本文的基础搭建:gazebo模型及各类配置文件见https://blog.csdn.net/weixin_41469272/article/details/152049194
需要完成以上的配置的基础上,才能进行本文的配置。
- 0. 更新各类配置文件
unitree_guide/unitree_move_base/config/vlp_costmap_common_params.yaml
xml
obstacle_range: 10 ##
raytrace_range: 15 ##
footprint: [[0.3, 0.4], [0.3, -0.4], [-0.35, -0.4], [-0.35, 0.4]]
# robot_radius: 0.3
inflation_radius: 0.3
max_obstacle_height: 5.0
min_obstacle_height: 0.0
origin_z: 0.0
# observation_sources: scan
# scan: {data_type: LaserScan, topic: /merged_laserscan, marking: true, clearing: true, expected_update_rate: 3.3}
observation_sources: scan
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true, expected_update_rate: 10}
#observation_sources: scan
#headLaserscan: {data_type: LaserScan, topic: scan, marking: true, clearing: true, expected_update_rate: 10}unitree_guide/unitree_move_base/config/vlp_global_costmap_params.yaml
xml
global_costmap:
global_frame: odom
robot_base_frame: base
update_frequency: 1.0
publish_frequency: 1.0
rolling_window: true
width: 20.0
height: 15.0
resolution: 0.05
transform_tolerance: 1.0
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacles, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}unitree_guide/unitree_move_base/config/vlp_local_costmap_params.yaml
xml
local_costmap:
global_frame: odom
robot_base_frame: base
update_frequency: 5.0
publish_frequency: 3.0
rolling_window: true
width: 3
height: 5
inflation_radius: 0.3
resolution: 0.05
transform_tolerance: 1.0
plugins:
- {name: obstacles, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
cartographer_ros/cartographer_ros)/configuration_files/vlp_2d.lua
xml
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu_link",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
pose_extrapolator = {
pose_queue_duration = 0.5,
imu_gravity_time_constant = 10.,
odometry_translation_weight = 1.,
odometry_rotation_weight = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return optionsunitree_guide/unitree_move_base/launch/my_carto_explore.launch
xml
<launch>
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan"
respawn="false" output="screen">
<remap from="cloud_in" to="/velodyne_points"/>
<!--remap from="/scan" to="/headLaserScan"/-->
<rosparam>
target_frame: velodyne
transform_tolerance: 0.1
min_height: 0.0
max_height: 1.0
angle_min: -3.14159
angle_max: 3.14159
angle_increment: 0.0175
scan_time: 0.1
range_min: 0.5
range_max: 10.0
use_inf: false
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 1
</rosparam>
</node>
<!-- MoveBase -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find unitree_move_base)/config/vlp_costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find unitree_move_base)/config/vlp_costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find unitree_move_base)/config/vlp_global_costmap_params.yaml" command="load" />
<rosparam file="$(find unitree_move_base)/config/vlp_local_costmap_params.yaml" command="load" />
<rosparam file="$(find unitree_move_base)/config/vlp_teb_local_planner_params.yaml" command="load" />
<!-- (TEB) -->
<!--param name="base_global_planner" value="global_planner/GlobalPlanner"/-->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS"/>
</node>
<!-- AMCL -->
<!-- <include file="$(find unitree_move_base)/launch/amcl.launch" /> -->
<param name="/use_sim_time" value="true" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename vlp_2d.lua"
output="screen">
<!--remap from="points2" to="/velodyne_points" /-->
<remap from="imu" to="/trunk_imu" />
<!--remap from="/scan" to="/headLaserScan"/-->
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<!--node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" /-->
<node pkg="explore_lite" type="explore" name="explore" output="screen">
<param name="costmap_topic" value="/map"/>
<param name="robot_base_frame" value="base"/>
<!--param name="costmap_topic" value="/move_base/global_costmap/costmap"/-->
<!--param name="costmap_updates_topic" value="costmap_updates"/-->
<param name="costmap_updates_topic" value="map_updates"/>
<param name="visualize" value="true"/>
<param name="planner_frequency" value="0.2"/>
<param name="progress_timeout" value="30.0"/>
<param name="potential_scale" value="3.0"/>
<param name="gain_scale" value="1.0"/>
<param name="min_frontier_size" value="0.5"/>
<param name="frontier_search_size" value="15.0" />
launch-prefix="bash -c 'sleep 1.0; $0 $@' ">
</node>
<!-- rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find unitree_move_base)/config/my_cart_move_base.rviz"/>
</launch>- 1. 启动gazebo仿真
bash
roslaunch unitree_guide vlp_go2.launch- 2. 启动控制模块
bash
./devel/lib/unitree_guide/junior_ctrl后输入2,让狗站起来。再进行下述操作
- 3. 启动move_base + cartographer + pc2scan
bash
roslaunch unitree_move_base my_carto_explore.launch 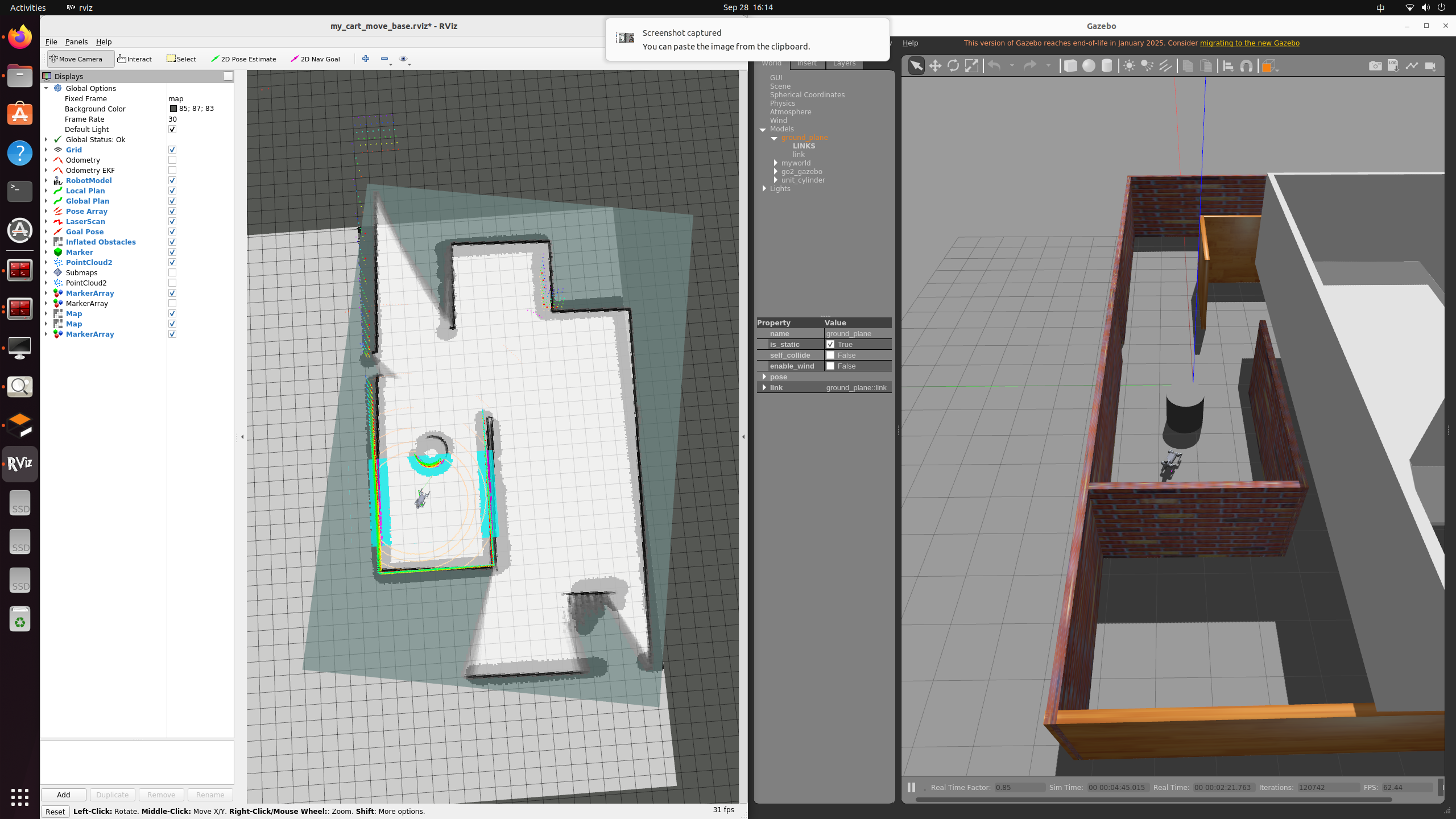
问题
-
待解决问题
gazebo 加载带雷达的go2 时,狗头会被激光压歪。使得整个地图的构建也是歪的
原因分析:由于vlp16重力导致。尚未去解
折中办法:在启动move_base 之前,先让go2先站起来,后启动定位节点,减少
-
cartograoher的base_link找不到到source frame的映射关系,此外还有rviz 中trajecties有报错的问题
go2 模型使用的base坐标系,暂时没管。