若基站坐标不准,
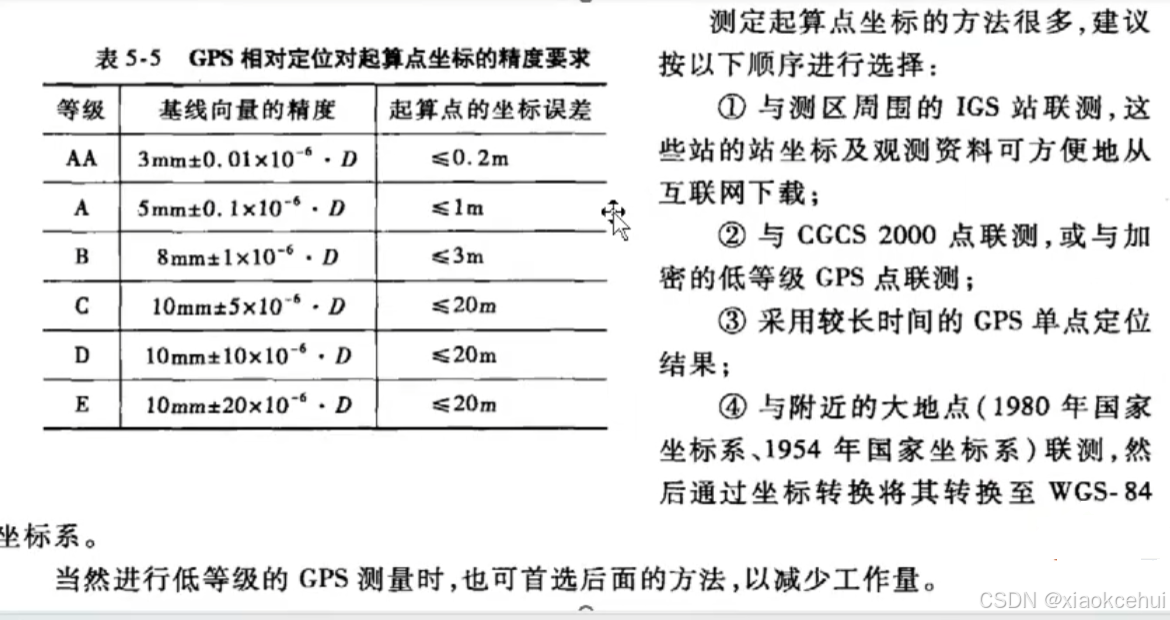
基站的坐标误差,
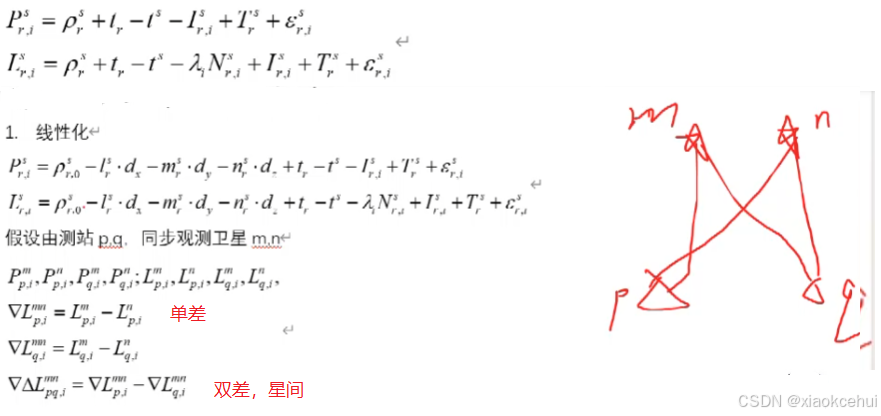
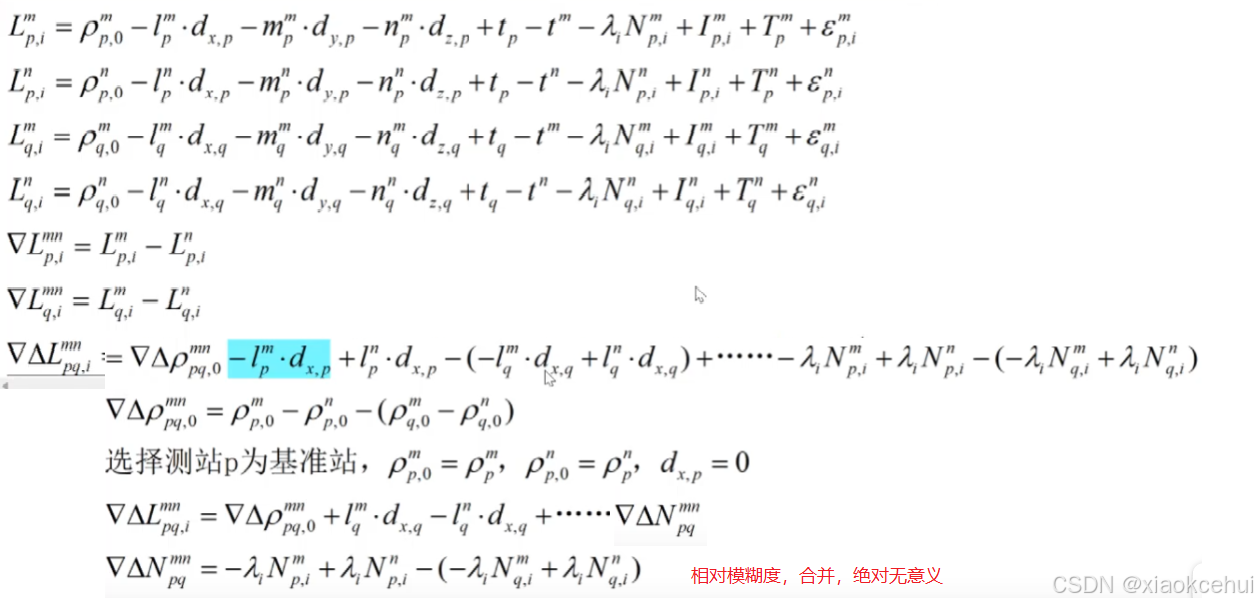
伪距和相位双差

还需要广播星历,知道卫星的坐标。

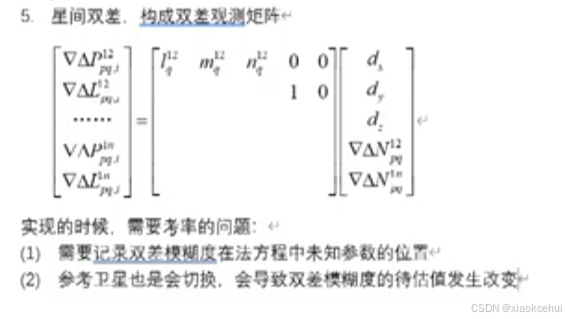
第1个问题,共视卫星变了,双差模糊度也会变,法方程的维护问题
rtkpos.c
/* relpos()relative positioning ------------------------------------------------------
* args: rtk IO gps solution structure
obs I satellite observations 观测值
nu I # of user observations (rover)流动站
nr I # of ref observations (base)基站
nav I satellite navigation data 广播星历
*/
static int relpos(rtk_t *rtk, const obsd_t *obs, int nu, int nr,
const nav_t *nav)
{
prcopt_t *opt=&rtk->opt;
gtime_t time=obs0.time;
double *rs,*dts,*var,*y,*e,*azel,*freq,*v,*H,*R,*xp,*Pp,*xa,*bias,dt;
int i,j,f,n=nu+nr,ns,ny,nv,satMAXSAT,iuMAXSAT,irMAXSAT;
int info,vflgMAXOBS\*NFREQ\*2+1,svhMAXOBS\*2;
int stat=rtk->opt.mode<=PMODE_DGPS?SOLQ_DGPS:SOLQ_FLOAT;
int nf=opt->ionoopt==IONOOPT_IFLC?1:opt->nf;
trace(3,"relpos : nu=%d nr=%d\n",nu,nr);
/* define local matrices, n=total observations, base + rover */
rs=mat(6,n); /* range to satellites */
dts=mat(2,n); /* satellite clock biases */
var=mat(1,n);
y=mat(nf*2,n);
e=mat(3,n);
azel=zeros(2,n); /* az, el */
freq=zeros(nf,n);
/* init satellite status arrays */
for (i=0;i<MAXSAT;i++) {
rtk->ssati.sys=satsys(i+1,NULL); /* gnss system */
for (j=0;j<NFREQ;j++) {
rtk->ssati.vsatj=0; /* valid satellite */
rtk->ssati.snr_roverj=0;
rtk->ssati.snr_basej =0;
}
}
//计算卫星位置、速度和钟差
/* compute satellite positions, velocities and clocks for base and rover */
satposs(time,obs,n,nav,opt->sateph,rs,dts,var,svh);
/* calculate range - measured pseudorange for base station (phase and code)
output is in ynu:nu+nr, see call for rover below for more details */
trace(3,"base station:\n");
//计算基准站非差残差
if (!zdres(1,obs+nu,nr,rs+nu*6,dts+nu*2,var+nu,svh+nu,nav,rtk->rb,opt,
y+nu*nf*2,e+nu*3,azel+nu*2,freq+nu*nf)) {
errmsg(rtk,"initial base station position error\n");
free(rs); free(dts); free(var); free(y); free(e); free(azel); free(freq);
return 0;
}
//计算基准站和流动站的延迟
/* time diff between base and rover observations */
if (opt->intpref) {
/* time-interpolation of base residuals */
dt=intpres(time,obs+nu,nr,nav,rtk,y+nu*nf*2);
} else dt=timediff(time,obsnu.time);
trace(3,"relpos : dt=%.3f\n",dt);
if (opt->mode!=PMODE_MOVEB) {
/* check if exceeded max age of differential */
rtk->sol.age=dt;
if (fabs(rtk->sol.age)>opt->maxtdiff) {
errmsg(rtk,"age of differential error (age=%.1f)\n",rtk->sol.age);
free(rs); free(dts); free(var); free(y); free(e); free(azel); free(freq);
return 1;
}
}
//选择共视卫星
/* select common satellites between rover and base-station */
if ((ns=selsat(obs,azel,nu,nr,opt,sat,iu,ir))<=0) {
errmsg(rtk,"no common satellite\n");
free(rs); free(dts); free(var); free(y); free(e); free(azel); free(freq);
return 0;
}
//卡尔曼滤波
/* update kalman filter states (pos,vel,acc,ionosp, troposp, sat phase biases) */
trace(4,"before udstate: x="); tracemat(4,rtk->x,1,NR(opt),13,4);
udstate(rtk,obs,sat,iu,ir,ns,nav);
trace(4,"after udstate x="); tracemat(4,rtk->x,1,NR(opt),13,4);
for (i=0;i<ns;i++) for (j=0;j<nf;j++) {
/* snr of base and rover receiver */
rtk->ssatsat\[i-1].snr_roverj=obsiu\[i].SNRj;
rtk->ssatsat\[i-1].snr_basej =obsir\[i].SNRj;
}
/* initialize Pp,xa to zero, xp to rtk->x */
xp=mat(rtk->nx,1); Pp=zeros(rtk->nx,rtk->nx); xa=mat(rtk->nx,1);
matcpy(xp,rtk->x,rtk->nx,1);
matcpy(Pp,rtk->P,rtk->nx,rtk->nx);
ny=ns*nf*2+2;
v=mat(ny,1); H=zeros(rtk->nx,ny); R=mat(ny,ny); bias=mat(rtk->nx,1);
trace(3,"rover: dt=%.3f\n",dt);
for (i=0;i<opt->niter;i++) {
/* calculate zero diff residuals range - measured pseudorange for rover (phase and code)
output is in y0:nu-1, only shared input with base is nav
obs = sat observations
nu = # of sats
rs = range to sats
dts = sat clock biases (rover)
svh = sat health flags
nav = sat nav data
xp = kalman states
opt = options
y = zero diff residuals (code and phase)
e = line of sight unit vectors to sats
azel = az, el to sats */
//流动站非差残差
if (!zdres(0,obs,nu,rs,dts,var,svh,nav,xp,opt,y,e,azel,freq)) {
errmsg(rtk,"rover initial position error\n");
stat=SOLQ_NONE;
break;
}
/* calculate double-differenced residuals and create state matrix from sat angles
O rtk->ssati.respj = residual pseudorange error
O rtk->ssati.rescj = residual carrier phase error
I dt = time diff between base and rover observations
I Pp = covariance matrix of float solution
I sat = list of common sats
I iu,ir = user and ref indices to sats
I ns = # of sats
O v = double diff residuals (phase and code)
O H = partial derivatives
O R = double diff measurement error covariances
O vflg = list of sats used for dd */
//双差残差
if ((nv=ddres(rtk,obs,dt,xp,Pp,sat,y,e,azel,freq,iu,ir,ns,v,H,R,vflg))<4) {
errmsg(rtk,"not enough double-differenced residual, n=%d\n", nv);
stat=SOLQ_NONE;
break;
}
/* kalman filter measurement update, updates x,y,z,sat phase biases, etc
K=P*H*(H'*P*H+R)^-1
xp=x+K*v
Pp=(I-K*H')*P */
trace(3,"before filter x=");tracemat(3,rtk->x,1,9,13,6);
if ((info=filter(xp,Pp,H,v,R,rtk->nx,nv))) {
errmsg(rtk,"filter error (info=%d)\n",info);
stat=SOLQ_NONE;
break;
}
trace(3,"after filter x=");tracemat(3,xp,1,9,13,6);
trace(4,"x(%d)=",i+1); tracemat(4,xp,1,NR(opt),13,4);
}
/* calc zero diff residuals again after kalman filter update */
if (stat!=SOLQ_NONE&&zdres(0,obs,nu,rs,dts,var,svh,nav,xp,opt,y,e,azel,freq)) {
/* calc double diff residuals again after kalman filter update for float solution */
nv=ddres(rtk,obs,dt,xp,Pp,sat,y,e,azel,freq,iu,ir,ns,v,NULL,R,vflg);
/* validation of float solution, always returns 1, msg to trace file if large residual */
if (valpos(rtk,v,R,vflg,nv,4.0)) {
/* copy states */
matcpy(rtk->x,xp,rtk->nx,1);
matcpy(rtk->P,Pp,rtk->nx,rtk->nx);
/* update valid satellite status for ambiguity control */
rtk->sol.ns=0;
for (i=0;i<ns;i++) for (f=0;f<nf;f++) {
if (!rtk->ssatsat\[i-1].vsatf) continue;
rtk->ssatsat\[i-1].outcf=0;
if (f==0) rtk->sol.ns++; /* valid satellite count by L1 */
}
/* too few valid phases */
if (rtk->sol.ns<4) stat=SOLQ_DGPS;
}
else stat=SOLQ_NONE;
}
/* resolve integer ambiguity by LAMBDA */
if (stat==SOLQ_FLOAT) {
/* if valid fixed solution, process it */
if (manage_amb_LAMBDA(rtk,bias,xa,sat,nf,ns)>1) {
/* find zero-diff residuals for fixed solution */
if (zdres(0,obs,nu,rs,dts,var,svh,nav,xa,opt,y,e,azel,freq)) {
/* post-fit residuals for fixed solution (xa includes fixed phase biases, rtk->xa does not) */
nv=ddres(rtk,obs,dt,xa,Pp,sat,y,e,azel,freq,iu,ir,ns,v,NULL,R,vflg);
/* validation of fixed solution, always returns valid */
if (valpos(rtk,v,R,vflg,nv,4.0)) {
/* hold integer ambiguity if meet minfix count */
if (++rtk->nfix>=rtk->opt.minfix) {
// Note that the modear needs to be fix-and-hold in
// order for glomodear fix-and-hold to be applied here,
// to prevent glomodear alone forcing fix-and-hold.
if (rtk->opt.modear==ARMODE_FIXHOLD)
holdamb(rtk,xa);
/* switch to kinematic after qualify for hold if in static-start mode */
if (rtk->opt.mode==PMODE_STATIC_START) {
rtk->opt.mode=PMODE_KINEMA;
trace(3,"Fix and hold complete: switch to kinematic mode\n");
}
}
stat=SOLQ_FIX;
}
}
}
}
/* save solution status (fixed or float) */
if (stat==SOLQ_FIX) {
for (i=0;i<3;i++) {
rtk->sol.rri=rtk->xai;
rtk->sol.qri=(float)rtk->Pai+i\*rtk-\>na;
}
rtk->sol.qr3=(float)rtk->Pa1;
rtk->sol.qr4=(float)rtk->Pa1+2\*rtk-\>na;
rtk->sol.qr5=(float)rtk->Pa2;
if (rtk->opt.dynamics) { /* velocity and covariance */
for (i=3;i<6;i++) {
rtk->sol.rri=rtk->xai;
rtk->sol.qvi-3=(float)rtk->Pai+i\*rtk-\>na;
}
rtk->sol.qv3=(float)rtk->Pa4+3\*rtk-\>na;
rtk->sol.qv4=(float)rtk->Pa5+4\*rtk-\>na;
rtk->sol.qv5=(float)rtk->Pa5+3\*rtk-\>na;
}
}
else { /* float solution */
for (i=0;i<3;i++) {
rtk->sol.rri=rtk->xi;
rtk->sol.qri=(float)rtk->Pi+i\*rtk-\>nx;
}
rtk->sol.qr3=(float)rtk->P1;
rtk->sol.qr4=(float)rtk->P1+2\*rtk-\>nx;
rtk->sol.qr5=(float)rtk->P2;
if (rtk->opt.dynamics) { /* velocity and covariance */
for (i=3;i<6;i++) {
rtk->sol.rri=rtk->xi;
rtk->sol.qvi-3=(float)rtk->Pi+i\*rtk-\>nx;
}
rtk->sol.qv3=(float)rtk->P4+3\*rtk-\>nx;
rtk->sol.qv4=(float)rtk->P5+4\*rtk-\>nx;
rtk->sol.qv5=(float)rtk->P5+3\*rtk-\>nx;
}
rtk->nfix=0;
}
trace(3,"sol_rr= ");tracemat(3,rtk->sol.rr,1,6,15,3);
/* save phase measurements */
for (i=0;i<n;i++) for (j=0;j<nf;j++) {
if (obsi.Lj==0.0) continue;
rtk->ssatobs\[i.sat-1].ptobs\[i.rcv-1]j=obsi.time;
rtk->ssatobs\[i.sat-1].phobs\[i.rcv-1]j=obsi.Lj;
}
for (i=0;i<MAXSAT;i++) for (j=0;j<nf;j++) {
/* Don't lose track of which sats were used to try and resolve the ambiguities */
/* if (rtk->ssati.fixj==2&&stat!=SOLQ_FIX) rtk->ssati.fixj=1; */
if (rtk->ssati.slipj&LLI_SLIP) rtk->ssati.slipcj++;
/* Inc lock count if this sat used for good fix */
if (!rtk->ssati.vsatj) continue;
if (rtk->ssati.lockj<0||(rtk->nfix>0&&rtk->ssati.fixj>=2))
rtk->ssati.lockj++;
}
free(rs); free(dts); free(var); free(y); free(e); free(azel); free(freq);
free(xp); free(Pp); free(xa); free(v); free(H); free(R); free(bias);
if (stat!=SOLQ_NONE) rtk->sol.stat=stat;
return stat!=SOLQ_NONE;
}
//双差残差
/* double-differenced residuals and partial derivatives -----------------------------------
O rtk->ssati.respj = residual pseudorange error
O rtk->ssati.rescj = residual carrier phase error
I rtk->rb= base location
I dt = time diff between base and rover observations
I x = rover pos & vel and sat phase biases (float solution)
I P = error covariance matrix of float states
I sat = list of common sats
I y = zero diff residuals (code and phase, base and rover)
I e = line of sight unit vectors to sats
I azel = az, el to sats
I iu,ir = user and ref indices to sats
I ns = # of sats
O v = double diff innovations (measurement-model) (phase and code)
O H = linearized translation from innovations to states (az/el to sats)
O R = measurement error covariances
O vflg = bit encoded list of sats used for each double diff */
static int ddres(rtk_t *rtk, const obsd_t *obs, double dt, const double *x,
const double *P, const int *sat, double *y, double *e,
double *azel, double *freq, const int *iu, const int *ir,
int ns, double *v, double *H, double *R, int *vflg)
{
prcopt_t *opt=&rtk->opt;
double bl,dr3,posu3,posr3,didxi=0.0,didxj=0.0,*im;
double *tropr,*tropu,*dtdxr,*dtdxu,*Ri,*Rj,freqi,freqj,*Hi=NULL,df;
int i,j,k,m,f,nv=0,nbNFREQ\*NSYS\*2+2={0},b=0,sysi,sysj,nf=NF(opt);
int frq,code;
trace(3,"ddres : dt=%.4f ns=%d\n",dt,ns);
/* bl=distance from base to rover, dr=x,y,z components */
bl=baseline(x,rtk->rb,dr);
/* translate ecef pos to geodetic pos */
ecef2pos(x,posu); ecef2pos(rtk->rb,posr);
Ri=mat(ns*nf*2+2,1); Rj=mat(ns*nf*2+2,1); im=mat(ns,1);
tropu=mat(ns,1); tropr=mat(ns,1); dtdxu=mat(ns,3); dtdxr=mat(ns,3);
/* zero out residual phase and code biases for all satellites */
for (i=0;i<MAXSAT;i++) for (j=0;j<NFREQ;j++) {
rtk->ssati.respj=rtk->ssati.rescj=0.0;
}
/* compute factors of ionospheric and tropospheric delay
- only used if kalman filter contains states for ION and TROP delays
usually insignificant for short baselines (<10km)*/
for (i=0;i<ns;i++) {
if (opt->ionoopt==IONOOPT_EST) {
imi=(ionmapf(posu,azel+iui*2)+ionmapf(posr,azel+iri*2))/2.0;
}
if (opt->tropopt>=TROPOPT_EST) {
tropui=prectrop(rtk->sol.time,posu,0,azel+iui*2,opt,x,dtdxu+i*3);
tropri=prectrop(rtk->sol.time,posr,1,azel+iri*2,opt,x,dtdxr+i*3);
}
}
//对不同导航系统,各自选择参考卫星,做双差
/* step through sat systems: m=0:gps/sbs,1:glo,2:gal,3:bds 4:qzs 5:irn*/
for (m=0;m<6;m++) {
/* step through phases/codes */
for (f=opt->mode>PMODE_DGPS?0:nf;f<nf*2;f++) {
frq=f%nf;code=f<nf?0:1;
/* find reference satellite with highest elevation, set to i */
for (i=-1,j=0;j<ns;j++) {
sysi=rtk->ssatsat\[j-1].sys;
if (!test_sys(sysi,m) || sysi==SYS_SBS) continue;
if (!validobs(iuj,irj,f,nf,y)) continue;
/* skip sat with slip unless no other valid sat */
if (i>=0&&rtk->ssatsat\[j-1].slipfrq&LLI_SLIP) continue;
if (i<0||azel1+iu\[j*2]>=azel1+iu\[i*2]) i=j;
}
if (i<0) continue;
//计算双差残差
/* calculate double differences of residuals (code/phase) for each sat */
for (j=0;j<ns;j++) {
if (i==j) continue; /* skip ref sat */
sysi=rtk->ssatsat\[i-1].sys;
sysj=rtk->ssatsat\[j-1].sys;
freqi=freqfrq+iu\[i*nf];
freqj=freqfrq+iu\[j*nf];
if (freqi<=0.0||freqj<=0.0) continue;
if (!test_sys(sysj,m)) continue;
if (!validobs(iuj,irj,f,nf,y)) continue;
if (H) {
Hi=H+nv*rtk->nx;
for (k=0;k<rtk->nx;k++) Hik=0.0;
}
//两个接收站对两个卫星的双差
/* double-differenced measurements from 2 receivers and 2 sats in meters */
vnv=(yf+iu\[i*nf*2]-yf+ir\[i*nf*2])-
(yf+iu\[j*nf*2]-yf+ir\[j*nf*2]);
//流动站对两个卫星位置偏导数
/* partial derivatives by rover position, combine unit vectors from two sats */
if (H) {
for (k=0;k<3;k++) {
Hik=-ek+iu\[i*3]+ek+iu\[j*3]; /* translation of innovation to position states */
}
}
//为了维护法方程的稳定性,列出每颗卫星对流层和电离层改正值,与PPP 一样
if (opt->ionoopt==IONOOPT_EST) {
/* adjust double-differenced measurements by double-differenced ionospheric delay term */
didxi=(code?-1.0:1.0)*imi*SQR(FREQL1/freqi);
didxj=(code?-1.0:1.0)*imj*SQR(FREQL1/freqj);
vnv-=didxi*xII(sat\[i,opt)]-didxj*xII(sat\[j,opt)];
if (H) {
HiII(sat\[i,opt)]= didxi;
HiII(sat\[j,opt)]=-didxj;
}
}
if (opt->tropopt>=TROPOPT_EST) {
/* adjust double-differenced measurements by double-differenced tropospheric delay term */
vnv-=(tropui-tropuj)-(tropri-troprj);
for (k=0;k<(opt->tropopt<TROPOPT_ESTG?1:3);k++) {
if (!H) continue;
HiIT(0,opt)+k= (dtdxuk+i\*3-dtdxuk+j\*3);
HiIT(1,opt)+k=-(dtdxrk+i\*3-dtdxrk+j\*3);
}
}
if (opt->mode > PMODE_DGPS && !code) {
//无电离组合IF法求整周模糊度
int ii = IB(sati, frq, opt);
int jj = IB(satj, frq, opt);
/* Adjust phase residual by double-differenced phase-bias term,
IB=look up index by sat&freq */
if (opt->ionoopt!=IONOOPT_IFLC) {
/* Phase-bias states are single-differenced so need to difference them */
vnv-=CLIGHT/freqi*xii-CLIGHT/freqj*xjj;
if (H) {
Hiii= CLIGHT/freqi;
Hijj=-CLIGHT/freqj;
}
}
else {
vnv-=xii-xjj;
if (H) {
Hiii= 1.0;
Hijj=-1.0;
}
}
}
/* adjust double-difference for glonass sats */
if (sysi==SYS_GLO&&sysj==SYS_GLO) {
if (rtk->opt.glomodear==GLO_ARMODE_AUTOCAL && frq<NFREQGLO) {
/* auto-cal method */
df=(freqi-freqj)/(f==0?DFRQ1_GLO:DFRQ2_GLO);
vnv-=df*xIL(frq,opt);
if (H) HiIL(frq,opt)=df;
}
else if (rtk->opt.glomodear==GLO_ARMODE_FIXHOLD && frq<NFREQGLO) {
/* fix-and-hold method */
double icb=rtk->ssatsat\[i-1].icbiasfrq*CLIGHT/freqi - rtk->ssatsat\[j-1].icbiasfrq*CLIGHT/freqj;
vnv-=icb;
}
}
/* adjust double-difference for sbas sats */
if (sysj==SYS_SBS&&sysi==SYS_GPS) {
if (rtk->opt.glomodear==GLO_ARMODE_FIXHOLD && frq<NFREQ) {
/* fix-and-hold method */
double icb=rtk->ssatsat\[i-1].icbiasfrq*CLIGHT/freqi - rtk->ssatsat\[j-1].icbiasfrq*CLIGHT/freqj;
vnv-=icb;
}
}
/* save residuals */
if (code) rtk->ssatsat\[j-1].respfrq=vnv; /* pseudorange */
else rtk->ssatsat\[j-1].rescfrq=vnv; /* carrier phase */
/* open up outlier threshold if one of the phase biases was just initialized */
double threshadj = 1;
if (opt->mode > PMODE_DGPS) {
// Open up outlier threshold if one of the phase biases was just initialized.
int ii = IB(sati, frq, opt);
int jj = IB(satj, frq, opt);
if (Pii + rtk-\>nx \* ii == SQR(rtk->opt.std0) ||
Pjj + rtk-\>nx \* jj == SQR(rtk->opt.std0))
threshadj = 10;
}
/* if residual too large, flag as outlier */
if (fabs(vnv)>opt->maxinnocode*threshadj) {
rtk->ssatsat\[j-1].vsatfrq=0;
rtk->ssatsat\[j-1].rejcfrq++;
errmsg(rtk,"outlier rejected (sat=%3d-%3d %s%d v=%.3f)\n",
sati,satj,code?"P":"L",frq+1,vnv);
continue;
}
//单差误差协方差
/* single-differenced measurement error variances (m) */
Rinv = varerr(sati, sysi, azel1+iu\[i*2],
rtk->ssatsat\[i-1].snr_roverfrq,
rtk->ssatsat\[i-1].snr_basefrq,
bl,dt,f,opt,&obsiu\[i]);
Rjnv = varerr(satj, sysj, azel1+iu\[j*2],
rtk->ssatsat\[j-1].snr_roverfrq,
rtk->ssatsat\[j-1].snr_basefrq,
bl,dt,f,opt,&obsiu\[j]);
/* increase variance if half cycle flags set */
if (!code&&(obsiu\[i].LLIfrq&LLI_HALFC)) Rinv+=0.01;
if (!code&&(obsiu\[j].LLIfrq&LLI_HALFC)) Rjnv+=0.01;
/* set valid data flags */
if (opt->mode>PMODE_DGPS) {
// Only valid for AR if there is phase data.
if (!code) rtk->ssatsat\[i-1].vsatfrq=rtk->ssatsat\[j-1].vsatfrq=1;
}
else {
rtk->ssatsat\[i-1].vsatfrq=rtk->ssatsat\[j-1].vsatfrq=1;
}
#ifdef TRACE
double icb;
if (rtk->opt.glomodear==GLO_ARMODE_AUTOCAL)
icb=xIL(frq,opt);
else
icb=rtk->ssatsat\[i-1].icbiasfrq*CLIGHT/freqi -
rtk->ssatsat\[j-1].icbiasfrq*CLIGHT/freqj;
double xjj = 0.0, Pjj = 0.0;
if (opt->mode>PMODE_DGPS) {
int jj = IB(satj, frq, &rtk->opt);
xjj = xjj;
Pjj = Pjj + jj \* rtk-\>nx;
}
trace(3,"sat=%3d-%3d %s%d v=%13.3f R=%9.6f %9.6f icb=%9.3f lock=%5d x=%9.3f P=%.3f\n",
sati,satj,code?"P":"L",frq+1,vnv,Rinv,Rjnv,icb,
rtk->ssatsat\[j-1].lockfrq,xjj,Pjj);
#endif
vflgnv++=(sati<<16)|(satj<<8)|((code?1:0)<<4)|(frq);
nbb++;
}
b++;
}
} /* end of system loop */
/* baseline length constraint, for fixed distance between base and rover */
if (rtk->opt.baseline0>0.0&&constbl(rtk,x,P,v,H,Ri,Rj,nv)) {
vflgnv++=3<<4;
nbb++++;
}
if (H) {trace(5,"H=\n"); tracemat(5,H,rtk->nx,nv,7,4);}
/* double-differenced measurement error covariance */
ddcov(nb,b,Ri,Rj,nv,R);
free(Ri); free(Rj); free(im);
free(tropu); free(tropr); free(dtdxu); free(dtdxr);
return nv;
}
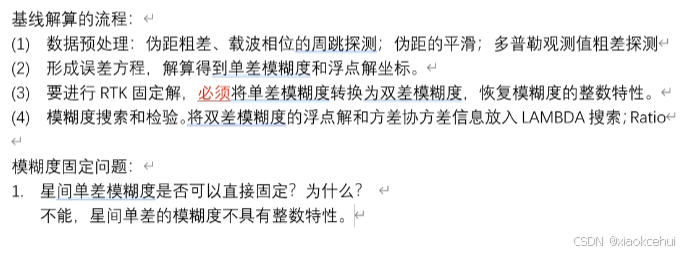
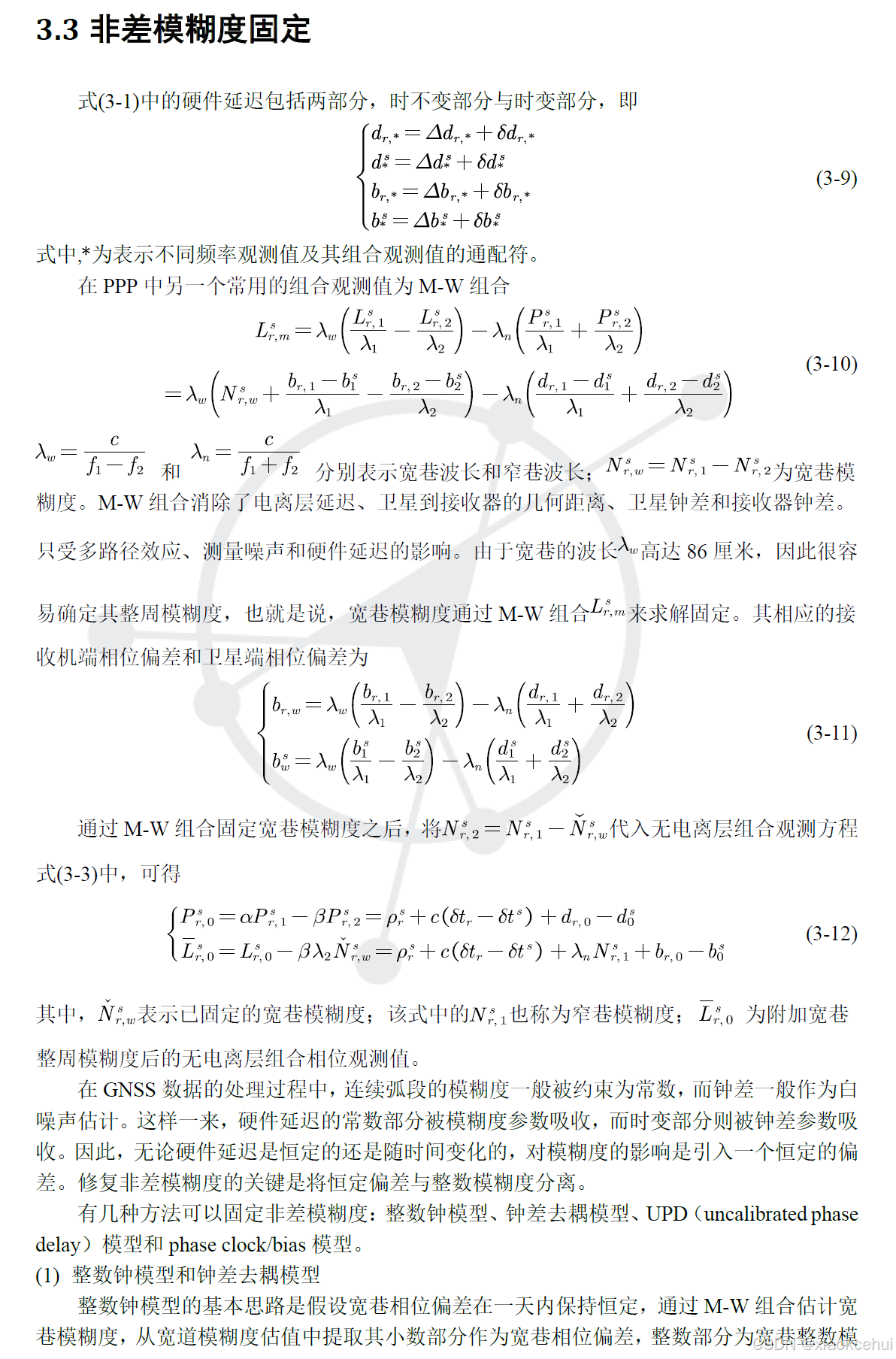
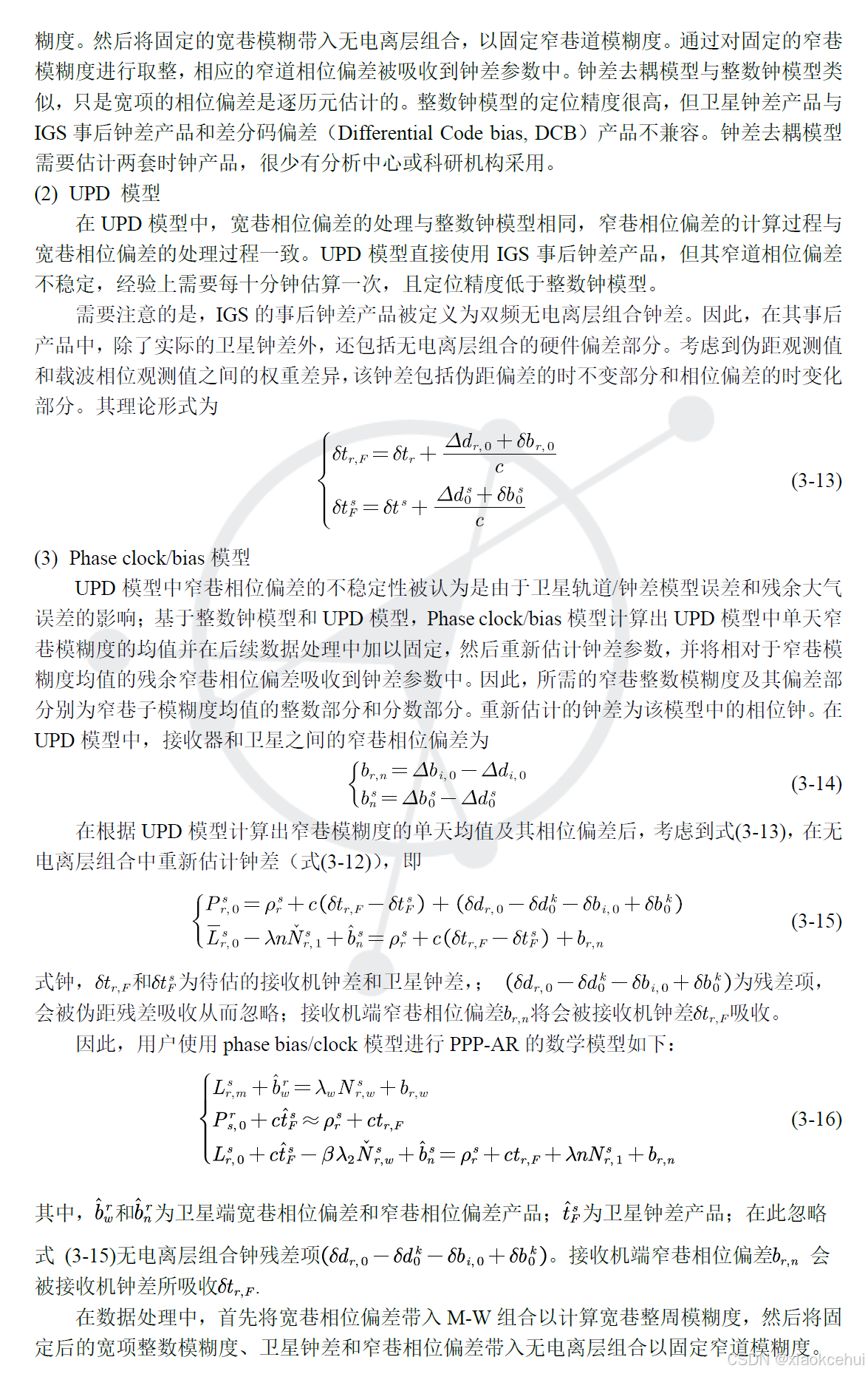
非差同样也不能进行模糊度固定。
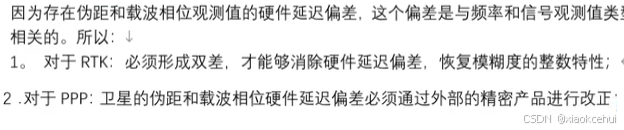
原因是接收机硬件延迟和卫星硬件延迟污染了伪距的接收机钟差和相位的模糊度。

PPP-AR,接收机硬件延迟通过星间单差消除了;卫星硬件延迟通过外部产品估计得到。
UPD,未校准的相位硬件延迟
参考文献
PRIDE PPP-AR v2.2 manual-ch.pdf