厘米级定位如何成为无人机的"标配"?深度体验CR401 RTK接收机的硬核实力
在无人机航测、精准喷洒、物流配送以及自动巡检等领域,传统的GPS定位精度往往在米级徘徊,这对于需要厘米级精准定位的先进应用而言,远远不够。你是否曾遇到过无人机定位漂移、悬停不稳或航线执行有偏差的困扰?这些问题的核心,往往在于定位模块的精度和可靠性。
那么,无人机是如何实现厘米级高精度定位的呢?答案就是RTK(实时动态差分定位)技术。而要将这项技术轻便、高效地集成到无人机中,一款优秀的RTK接收机至关重要。今天,我们就来深入解析一款在小型化与高性能之间取得完美平衡的产品------格林恩德CR401高精度北斗定位接收机。

一、极致小巧,释放飞控无限潜能
对于无人机,尤其是中小型无人机或智能机器人而言,每一克重量都至关重要。CR401最大的亮点之一就是其超小型化设计,尺寸仅为43mm x 38mmx 14mm,比一张邮票还要小。这种极致紧凑的体积使其能够轻松集成到各种空间受限的飞控平台中,为无人机"减负"的同时,毫不妥协地提供了顶级定位性能。
二、真正的厘米级定位精度,告别"飘移"烦恼
CR401的核心使命是提供稳定可靠的厘米级定位。其内置司南高精度定位模组,支持包括BDS(北斗)、GPS、GLONASS、Galileo在内的全球主流卫星导航系统,多模多频接收确保了在任何环境下都能快速搜星、稳定锁定。
其RTK定位精度令人印象深刻:
平面精度:±(8mm + 1ppm)
高程精度:±(15mm + 1ppm)
这意味着,无论是在农田上进行厘米级精度的农药喷洒,还是在建筑工地上进行毫米级精度的土方测量,CR401都能为无人机提供犹如"尺子"般精确的空间坐标,彻底告别定位飘移。
三、集成4G全网通,RTK差分数据无缝回传
RTK技术要实现厘米级定位,需要接收基准站发出的差分修正数据。CR401创新性地板载了4G全网通模块和eSIM流量卡,无需用户额外配置通信链路。它能通过4G网络自动、高速地接收差分数据,实现了"云+端" 的完美结合。兼容中国移动、联通、电信的所有网络制式,信号更强,覆盖更广,确保在复杂的户外作业环境中,差分数据链路的持续稳定。
四、内置高性能IMU,赋能智能导航与定向
除了顶尖的GNSS定位能力,CR401还搭载了高性能的6轴MEMS IMU(3轴加速度计+3轴陀螺仪)和3轴磁力计。这套组合拳为无人机带来了关键的价值:
姿态感知:实时提供无人机的俯仰、横滚和偏航角速度信息,与GPS位置数据融合,实现更平稳的飞行控制和抗干扰能力。
信号丢失补偿:在无人机短暂穿越桥梁、隧道等GNSS信号丢失的场景下,IMU可以通过惯性导航技术,在短时间内维持高精度的位姿估计,为飞控系统提供关键数据支撑。
航向辅助:磁力计提供了绝对航向参考,尤其在无人机启动时,能快速确定机头方向。
五、无缝对接主流飞控,极简集成引领开发新范式
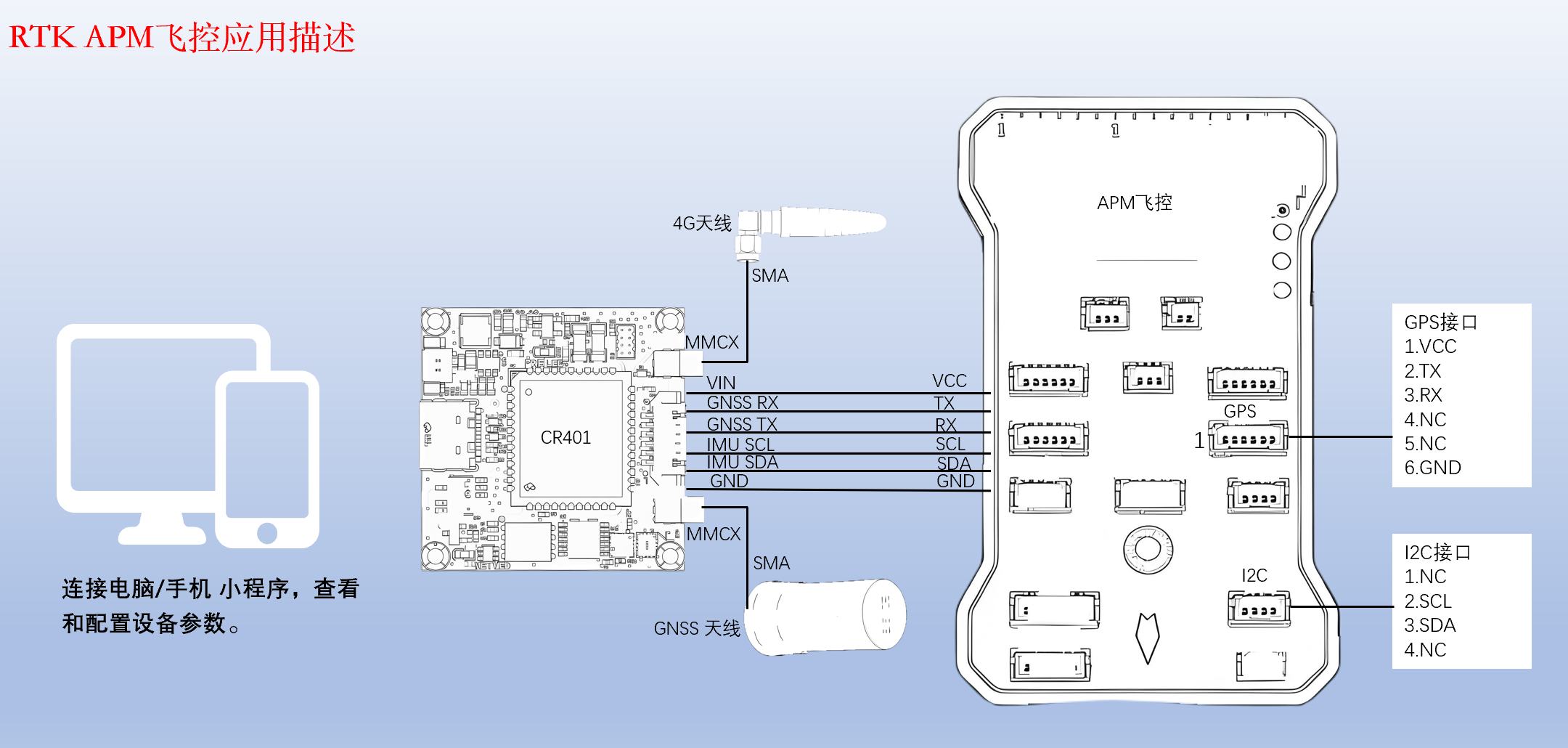
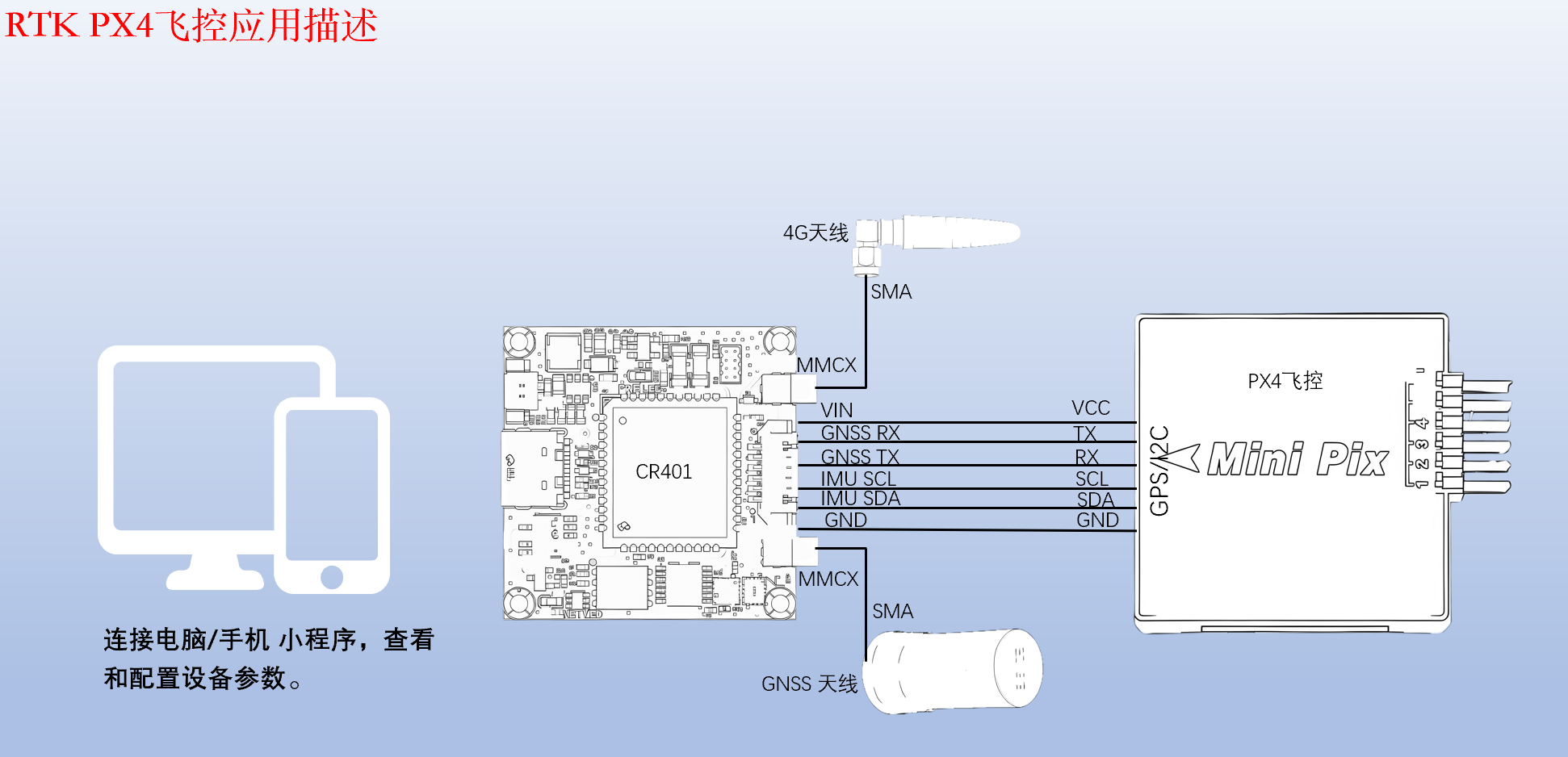
CR401的设计初衷就是为无人机飞控提供开箱即用的高精度定位解决方案。它原生支持PX4和APM(ArduPilot) 这两大最主流的开源飞控平台。
硬件接口标准化:设备提供通用的1.25*6P接口,直接与飞控的串口和I2C接口连接。其中,GNSS串口用于输出标准的NMEA-0183协议定位数据,而I2C接口则专门用于传输高性能IMU的原始数据。这种设计允许飞控直接获取融合后的精确定位、速度和姿态信息,极大简化了硬件连接。
协议兼容性:除了输出飞控可直接识别的NMEA数据外,CR401还支持RTCM 3.X协议输入差分修正数据,并通过4G网络实时接收,确保厘米级定位的持续性。
配置极简化:开发者无需复杂的底层驱动开发,通过USB连接电脑或手机微信小程序即可快速查看和配置设备参数,如差分数据源、输出频率等,实现了从硬件对接到参数配置的完整流程简化,显著加速了集成开发进程。
连接飞控示例
六、极简配置,打造无缝开发体验
传统的RTK设备配置往往复杂繁琐。CR401彻底改变了这一现状,支持USB连接电脑配置和微信小程序一键配置。开发者或用户无需深究复杂的协议,通过直观的界面即可快速完成网络参数、数据输出频率等设置,大大降低了集成和使用的技术门槛,让您"定位快人一步"。
核心特性一览:
厘米级RTK定位:为无人机提供前所未有的定位准确性。
超小型化设计:35x35mm,轻松集成于各类飞控。
板载4G/eSIM:无需外置数传,简化系统设计。
全系统GNSS支持:北斗、GPS、GLONASS、Galileo等,搜星更快更准。
高性能9轴IMU:提供姿态、航向及惯性导航支持。
宽电压输入(5-18V):直接适配无人机常用电源。
军工级MMCX天线接口:连接牢固可靠,适应恶劣环境。
支持MQTT/JT808等协议:方便数据回传至云端平台。
原生支持PX4/APM飞控:极简集成,快速部署。
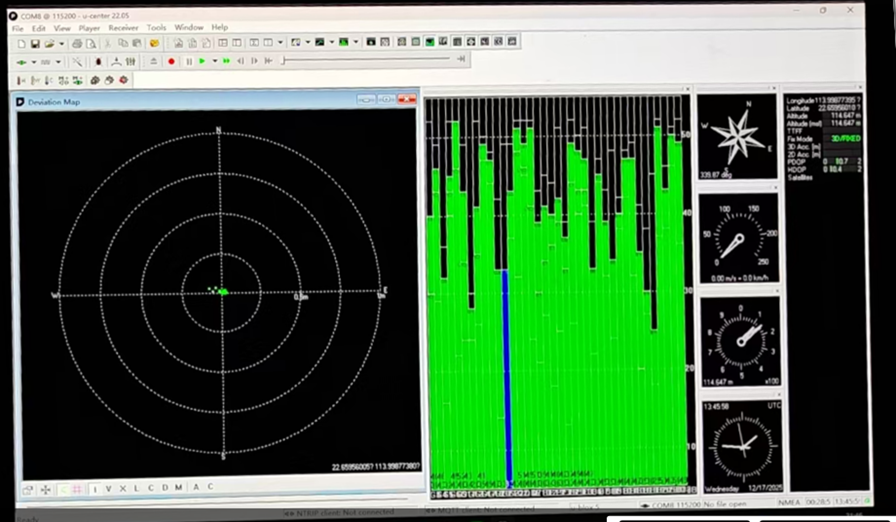
六、厘米级定位性能极致体验