环境配置
首先需要安装Conda、CUDA、Cudnn等工具,在此不过多赘述,主要讲解Python环境配置的相关参数
Python版本:3.10
Torch版本:1.13.1
安装完成后还需要pip一下yolo的库:
pip install ultralytics数据库准备
数据库请自行准备,这里可以使用roboflow来进行数据库格式转换
roboflow
这里进入网站之后注册登录一下,然后新建工程
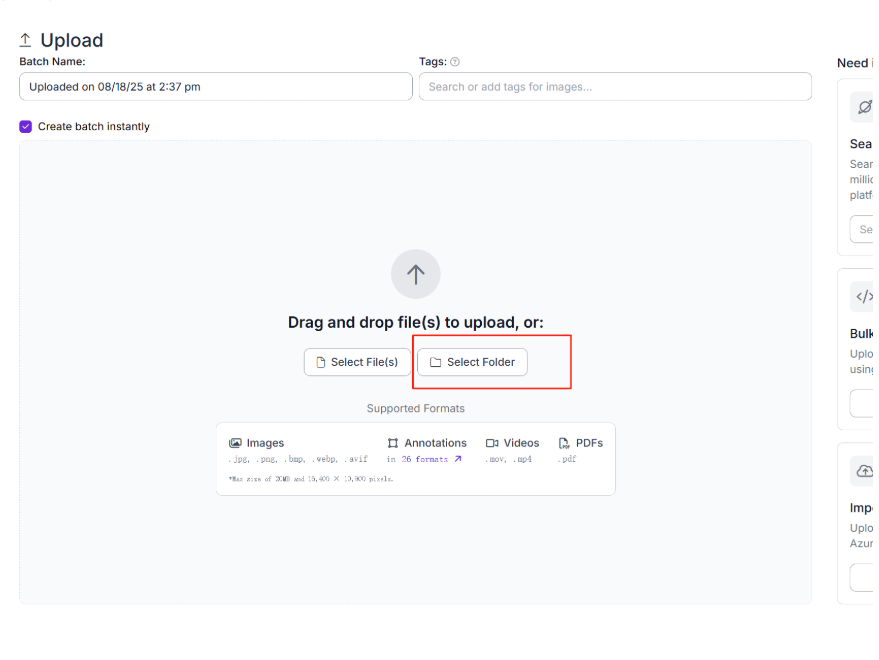
然后上传自己的数据集
!!\[\[Pasted image 20250818143753.png](https://i-blog.csdnimg.cn/direct/2d8649c86239412296c366514fd20f7f.png)
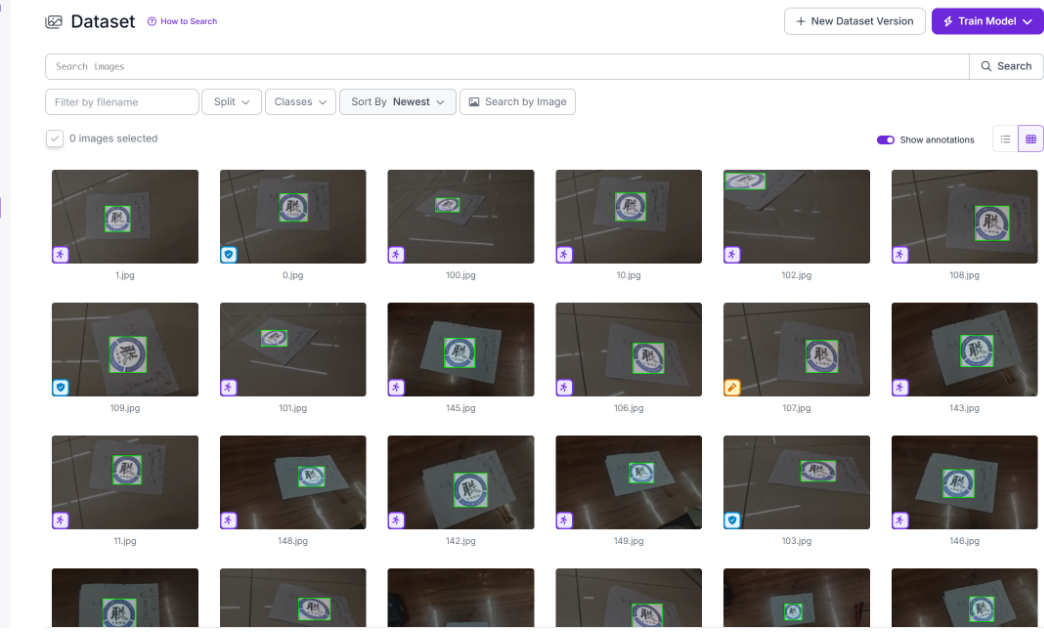
等待上传完毕
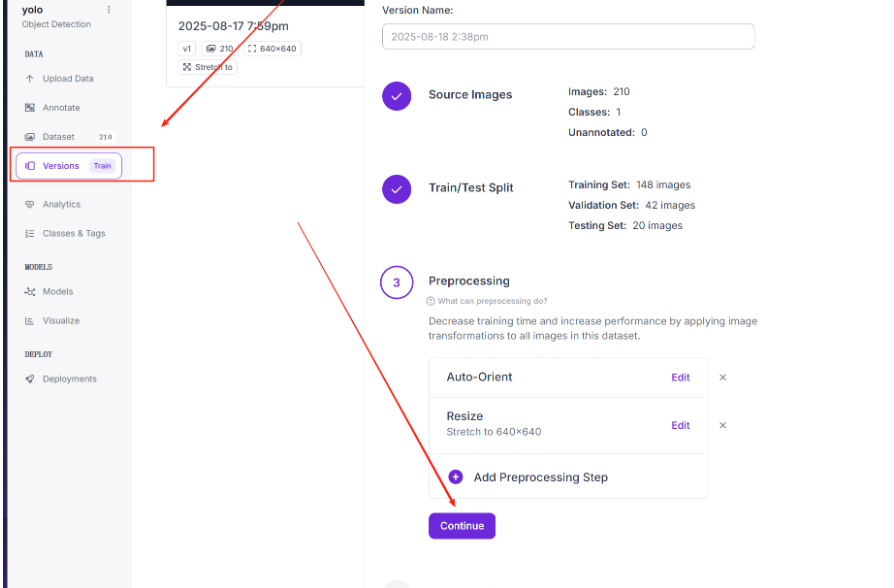
上传完毕后,点击Versions,然后后面的选项都默认即可
完成后点击创建
创建完毕后,点击Download,选择YoloV8格式,
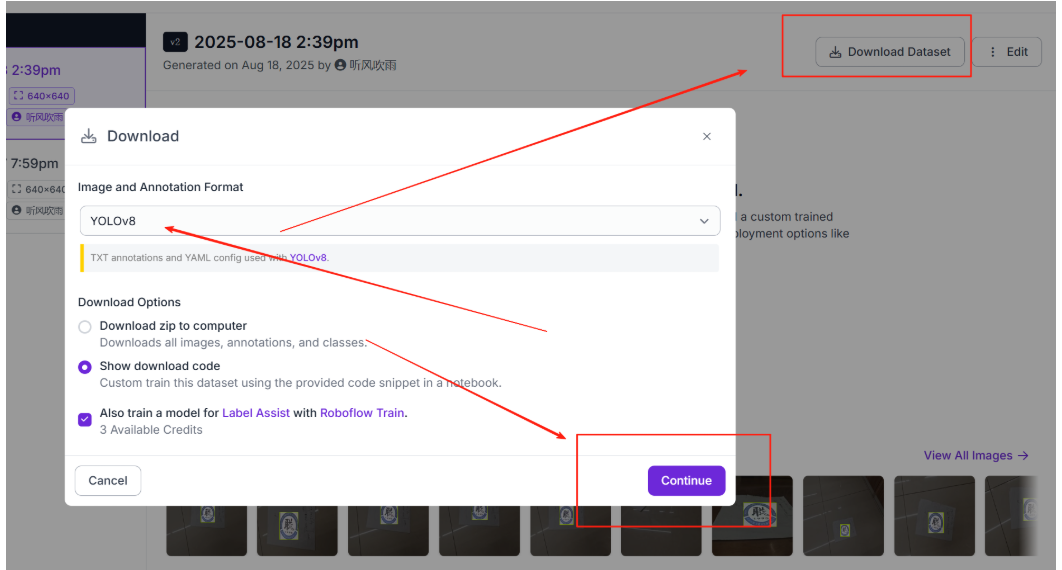
这样,就拿到可以使用的数据集了。
模型训练
首先下载Yolov8:
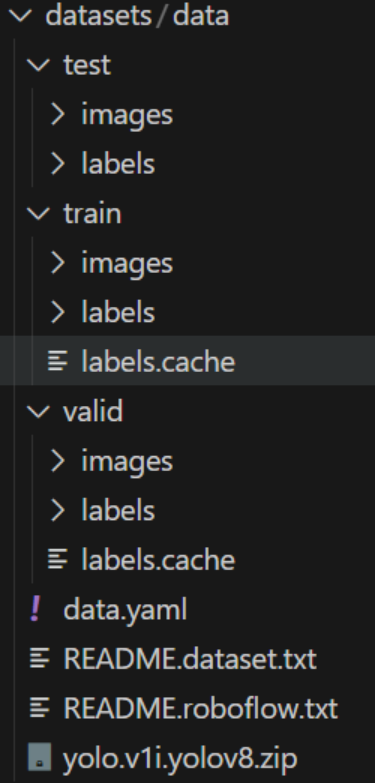
git clone https://github.com/Pertical/YOLOv8.git然后在该项目中新建datasets文件夹,将上一步的数据集解压放入其中:
随后,修改data.yaml
Python
train: /home/chuiyu/yolov8/ultralytics-main/datasets/data/train/images #改为对应的绝对路径
val: /home/chuiyu/yolov8/ultralytics-main/datasets/data/valid/images #改为对应的绝对路径
test: /home/chuiyu/yolov8/ultralytics-main/datasets/data/test/images #改为对应的绝对路径
nc: 1 #数据集种类数量
names: ['0'] #数据集种类名称
# roboflow:
# workspace: chuiyu
# project: yolo-38xf2
# version: 1
# license: CC BY 4.0
# url: https://universe.roboflow.com/chuiyu/yolo-38xf2/dataset/1最重要的一点 :要改激活函数为ReLU,我们如果默认不改,则训练得到的PT模型的激活函数为SiLU,如下所示:
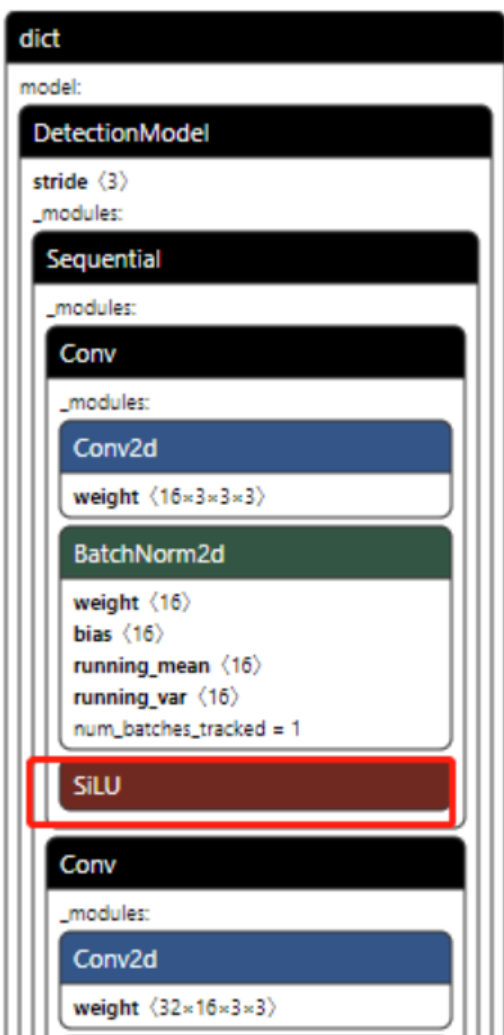
SiLU函数在PT模型中无任何问题,与ReLU函数的训练结果对比非常接近
改激活函数流程如下:
把ultralytics/nn/modules/conv.py中的Conv类进行修改,
将default_act = nn.SiLU() # default activation改为
default_act = nn.ReLU() # default activation
Python
from ultralytics import YOLO
# 加载模型
model = YOLO("yolov8n.yaml") # 从头开始构建新模型
model = YOLO("yolov8n.pt") # 加载预训练模型(推荐用于训练)
# Use the model
results = model.train(data="datasets/data/data.yaml", epochs=300,batch=4) # 训练模型
# results = model.val() # 在验证集上评估模型性能
# results = model("https://ultralytics.com/images/bus.jpg") # 预测图像
# success = model.export(format="onnx") # 将模型导出为 ONNX 格式将yolov8n同样放入项目根目录(可去github上进行下载)
随后即可运行train.py进行训练
bash
python3 train.py测试验证
训练完成后,同样在根目录创建一个test.py用于测试验证
Python
from ultralytics import YOLO
# 加载模型
model = YOLO("/home/chuiyu/yolov8/ultralytics-main/runs/detect/train11/weights/best.pt") # 将路径改为自己训练后的路径
results = model("datasets/data/test/images")
for result in results:
result.save()运行test.py,即可将测试集中的识别结果保存到根目录,可打开查看
pt转onnx
在训练得到PT模型后,我们可以用netron软件打开模型,看一下结构
现在我们的激活函数已经为ReLU了。
pt转onnx我们需要使用另一个yolov8的工程,
bash
git clone https://github.com/airockchip/ultralytics_yolov8.git将之前训练的.pt文件放入该项目的根目录
同时在根目录新建一个requirements.txt
Python
# Ultralytics requirements
# Usage: pip install -r requirements.txt
# Base ----------------------------------------
matplotlib>=3.2.2
numpy>=1.22.2 # pinned by Snyk to avoid a vulnerability
opencv-python>=4.6.0
pillow>=7.1.2
pyyaml>=5.3.1
requests>=2.23.0
scipy>=1.4.1
# torch>=1.7.0
# torchvision>=0.8.1
tqdm>=4.64.0
# Logging -------------------------------------
# tensorboard>=2.13.0
# dvclive>=2.12.0
# clearml
# comet
# Plotting ------------------------------------
pandas>=1.1.4
seaborn>=0.11.0
# Export --------------------------------------
# coremltools>=7.0.b1 # CoreML export
# onnx>=1.12.0 # ONNX export
# onnxsim>=0.4.1 # ONNX simplifier
# nvidia-pyindex # TensorRT export
# nvidia-tensorrt # TensorRT export
# scikit-learn==0.19.2 # CoreML quantization
# tensorflow>=2.4.1 # TF exports (-cpu, -aarch64, -macos)
# tflite-support
# tensorflowjs>=3.9.0 # TF.js export
# openvino-dev>=2023.0 # OpenVINO export
# Extras --------------------------------------
psutil # system utilization
py-cpuinfo # display CPU info
# thop>=0.1.1 # FLOPs computation
# ipython # interactive notebook
# albumentations>=1.0.3 # training augmentations
# pycocotools>=2.0.6 # COCO mAP
# roboflow然后下载依赖(同样使用之前的训练Yolov8的Python环境)
bash
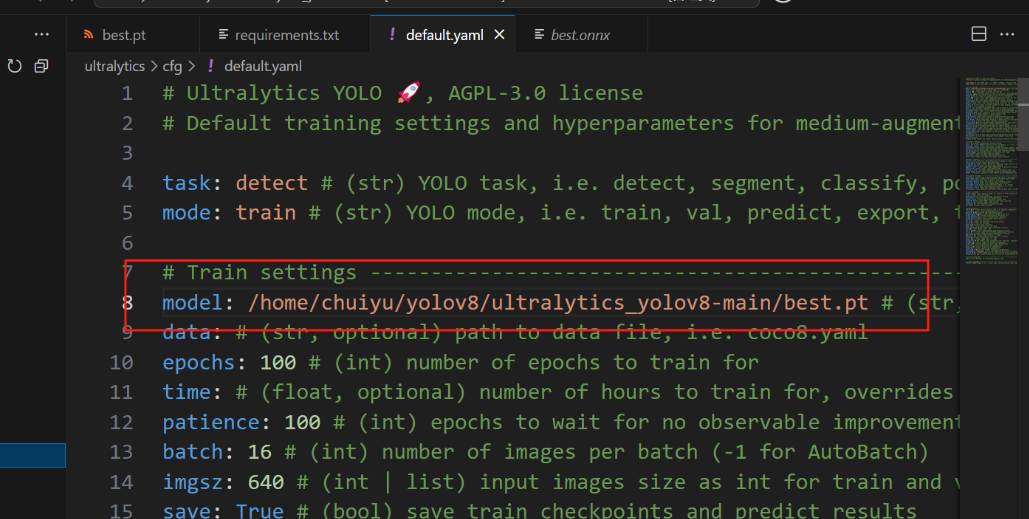
pip install -r requirements.txt完成后,修改ultralytics_yolov8 项目中的ultralytics/cfg/default.yaml,将其中的model参数路径改成你训练得到的的best.pt模型路径(记得使用绝对路径)
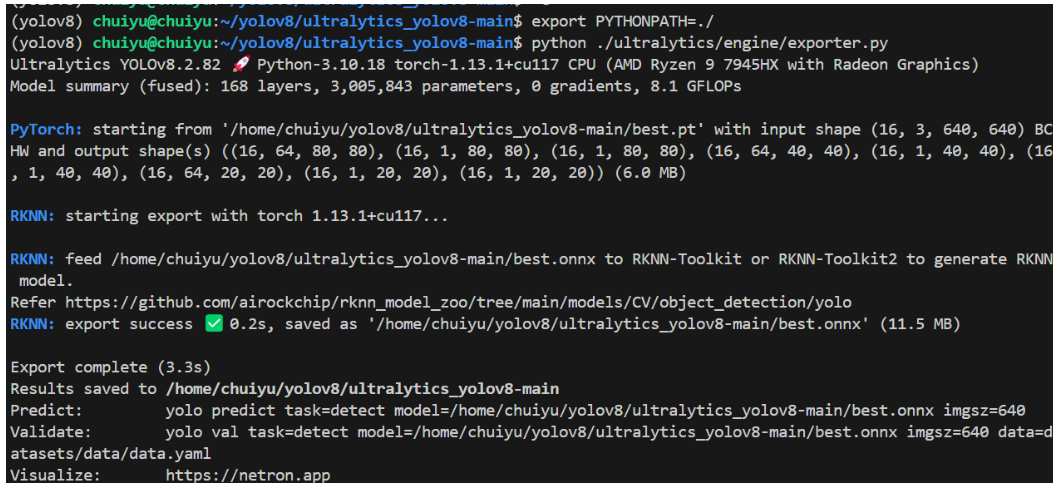
回到刚才1中的ultralytics文件夹所在的路径下,依次执行如下两个命令:
bash
export PYTHONPATH=./
python ./ultralytics/engine/exporter.py结果如下所示,此时的.onnx就生成在了项目的根目录了。
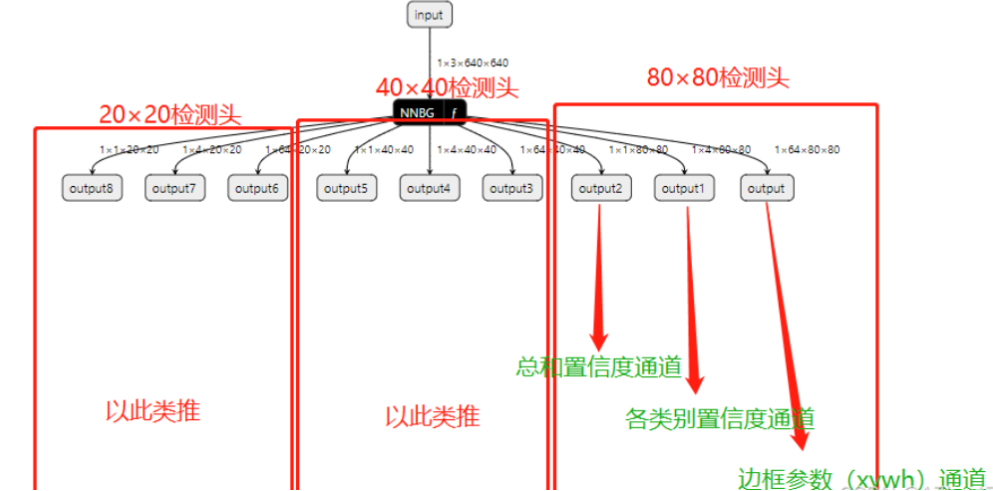
再用netron打开我们的onnx模型,如下所示:
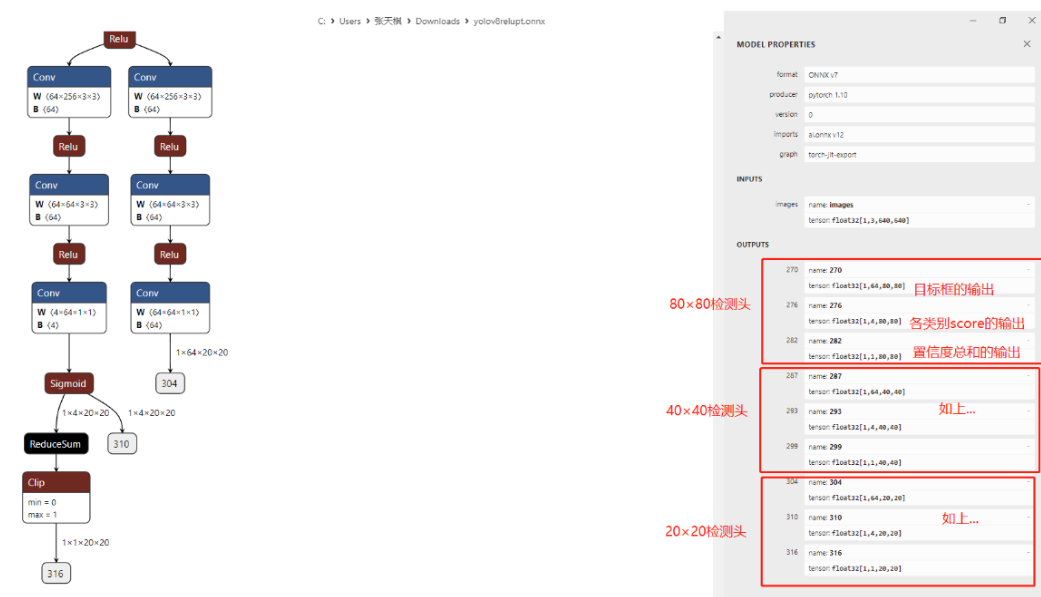
注意!上图的三个红色方框非常重要,YOLOv8在RKNN转换过程中,是要有三个分支的,分别80×80检测头,40×40检测头,20×20检测头。每个检测头下,都有三个输出,分别是box边框输出,即图上的1×64×80×80;还有各类别输出,即1×4×80×80(这里的4就是指我在PT模型训练时的garbage.yaml文件中定义了4个类别),最后是综合置信度输出,即1×1×80×80。(其余检测头同理)
onnx转rknn
这里我们另外创建Python环境
bash
conda create -n rknn210 python=3.8
conda activate rknn210现在需要用到rknn-toolkit2-2.1.0文件。
进入rknn-toolkit2-2.1.0\rknn-toolkit2-2.1.0\rknn-toolkit2\packages文件夹下,安装依赖环境
bash
pip install -r requirements_cp38-2.1.0.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install rknn_toolkit2-2.1.0+708089d1-cp38-cp38-linux_x86_64.whl然后,我们的转rknn环境就配置完成了。
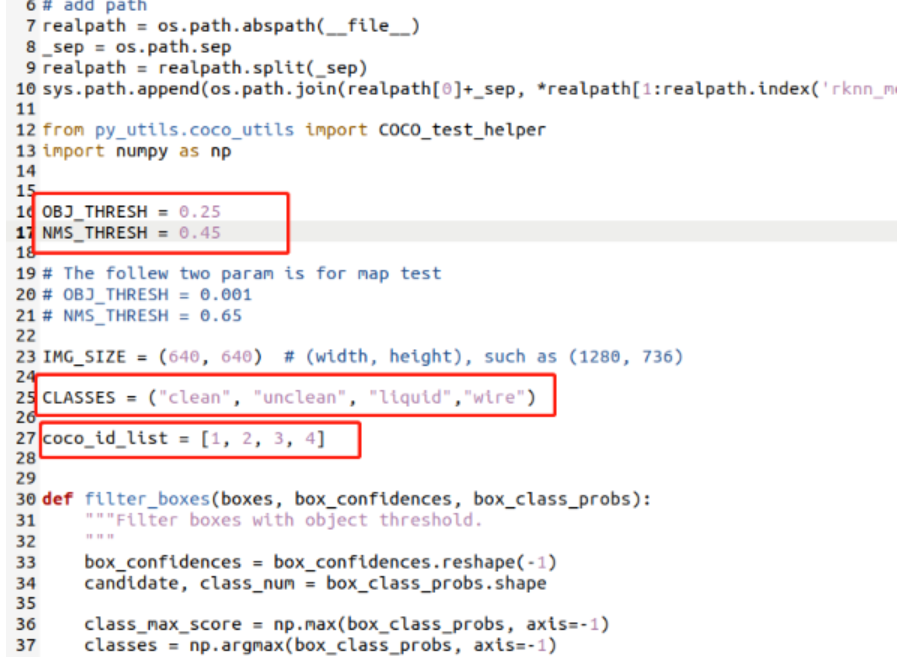
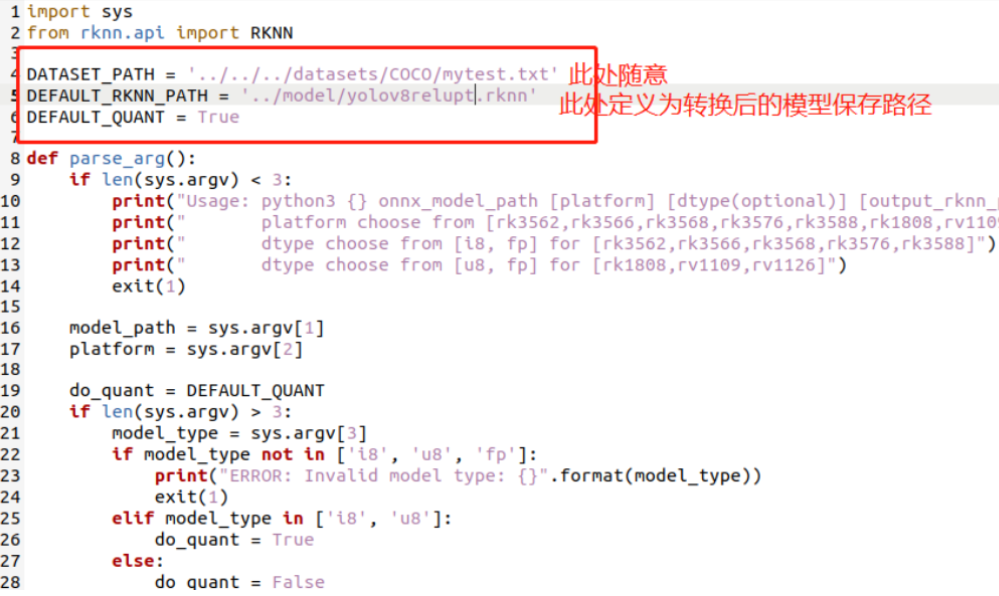
现在要进行模型转换,先进入rknn_model_zoo-2.1.0\examples\yolov8\python文件夹,先打开yolov8.py,进行适配参数修改:
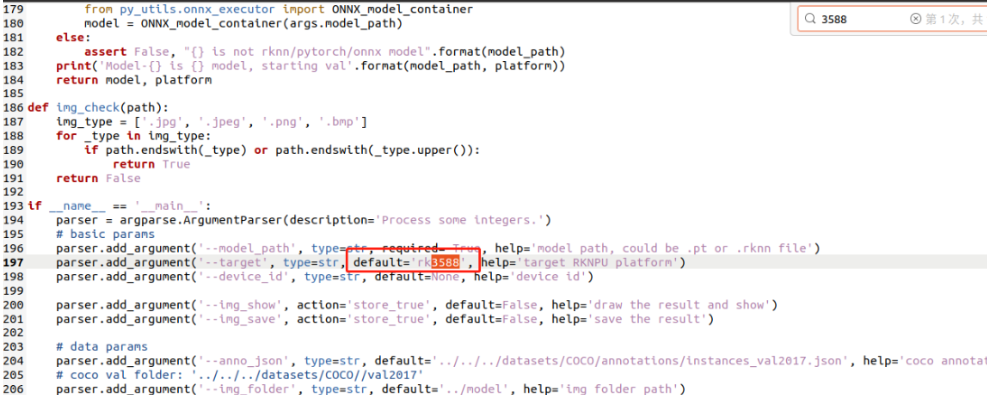
然后修改convert.py,如下所示:
修改完成后,将我们之前得到的onnx模型复制到python文件夹下
运行转换命令
bash
python convert.py 模型文件名.onnx rk3588可以看到,我们的模型转换并量化成功。
转换后的rknn模型已保存在model文件夹下。现在用netron打开我们的rknn模型,看一下结构:
这三个红框是和上面图中的三个红框对应的,所以若onnx没有所示的那三个框,则无法转换出适配官方部署文件的rknn模型。
模型部署
如果前面流程都已实现,模型的结构也没问题的话,则可以进行最后一步:模型端侧部署。
我已经帮大家做好了所有的环境适配工作,科学上网后访问博主GitHub仓库:YOLOv8_RK3588_object_detect 进行简单的路径修改就即可编译运行。
bash
git clone https://github.com/A7bert777/YOLOv8_RK3588_object_detect.gitgit clone后把项目复制到开发板上,按如下流程操作:
①:cd build,删除所有build文件夹下的内容
②:cd src 修改main.cc,修改main函数中的如下三个内容:
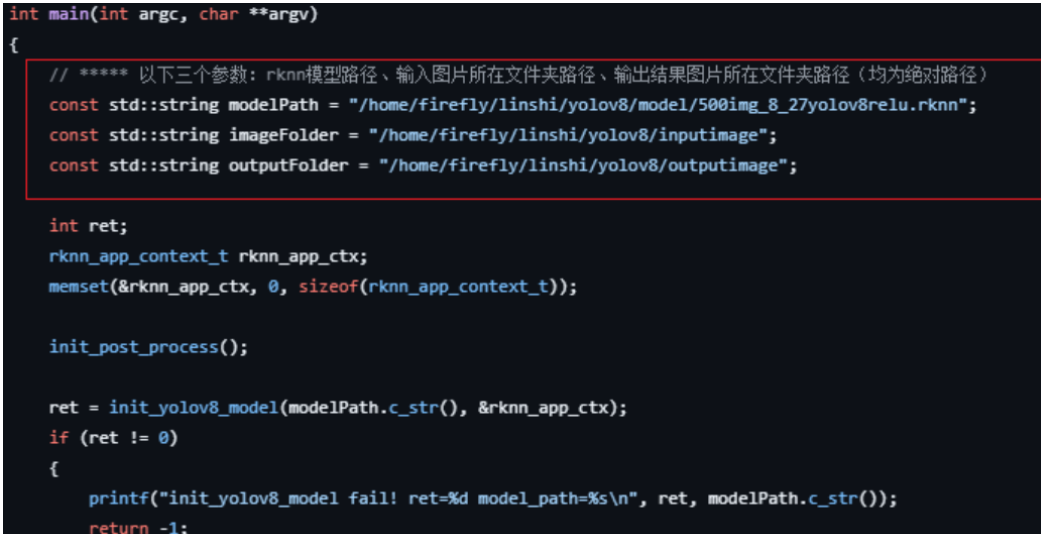
将这三个参数改成自己的绝对路径
③:cd src 修改postprocess.cc下的txt标签的绝对路径:
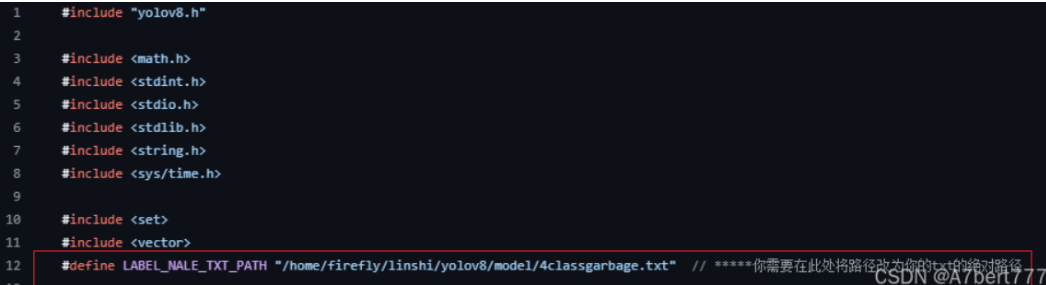
解释一下,这个标签路径中的内容如下所示:
其实就是你在训练yolov8时在yaml配置文件中的那几个类别名
④修改include/postprocess.h 中的宏 OBJ_CLASS_NUM
⑤:把你之前训练好并已转成RKNN格式的模型放到YOLOv8_RK3588_object_detect/model文件夹下,然后把你要检测的所有图片都放到YOLOv8_RK3588_object_detect/inputimage下。
在运行程序后,生成的结果图片在YOLOv8_RK3588_object_detect/outputimage下
⑥:进入build文件夹进行编译
bash
cd build
cmake ..
make然后就可以运行测试程序了:
bash
./rknn_yolov8_demo如果遇到了无法读取图片的报错:

把main.cc中的ret = read_image_opencv(fullPath.c_str(), &src_image); 改为ret = read_image(fullPath.c_str(), &src_image);即可
参考资料
1.YoloV8模型训练:【【yolov8】2024,半小时速通yolov8,2024最新,windows,ubuntu,wsl】 https://www.bilibili.com/video/BV13H4y1G7DP/?share_source=copy_web\&vd_source=800b0cce2dee97823e91fad6181bdec5