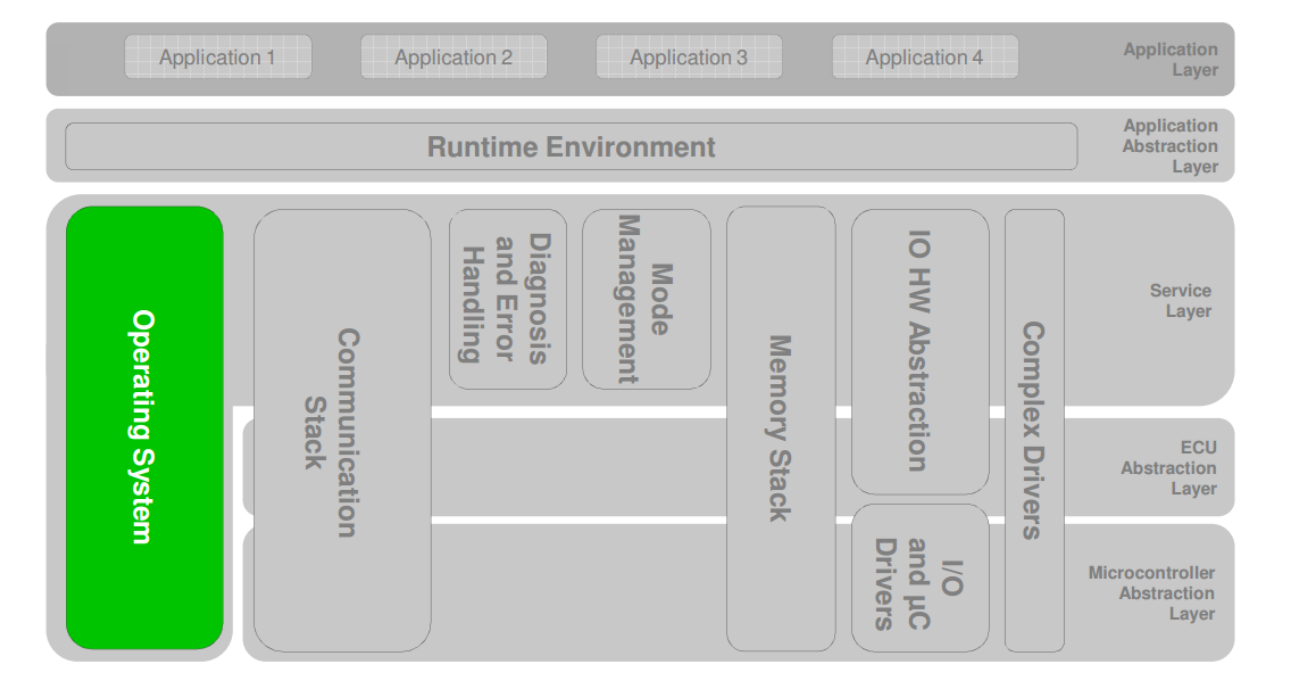
OS所在框架位置
可裁剪性
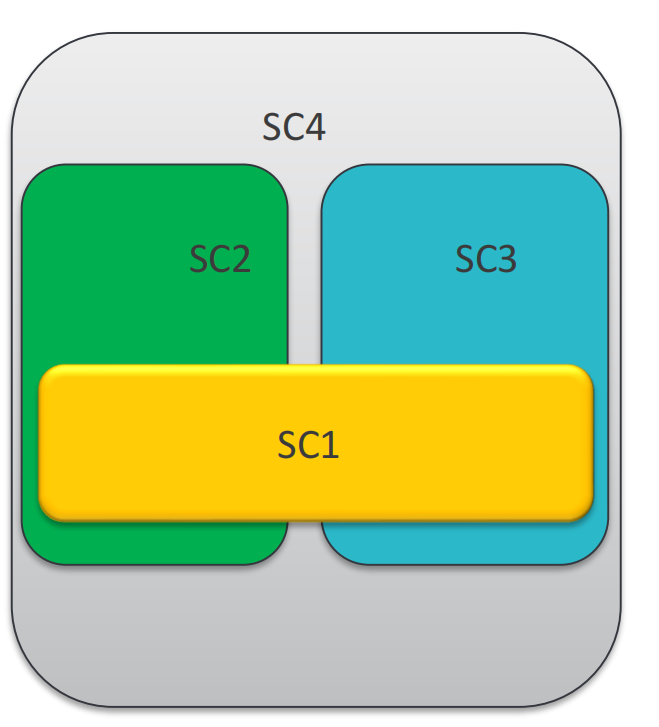
SC1:在Osek OS基础上加调度表
SC2:在SC1基础上加上时间保护和时间同步
SC3:在SC1基础上加上内存保护、服务保护、信任功能和APP
SC4:前面的都有
Task
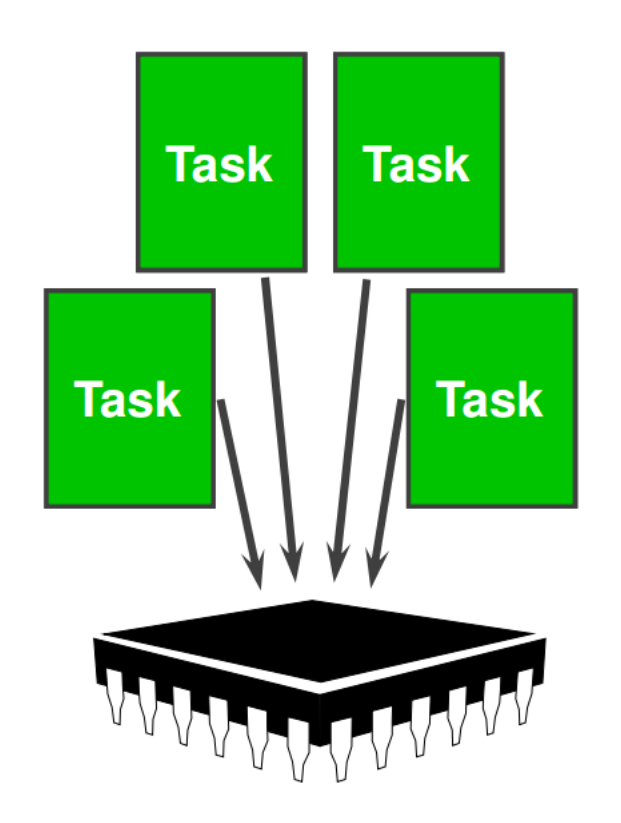
Task本质上就是 C 语言函数,这些函数可以并行执行。
一个应用程序中的所有Task都会争夺 CPU 的使用权。
Task可以自愿释放 CPU
在特定条件下,Task可以从中央处理器中移除
调度程序会决定接下来要执行的Task
每个Task的静态优先级都会由调度程序进行评估
Task优先级
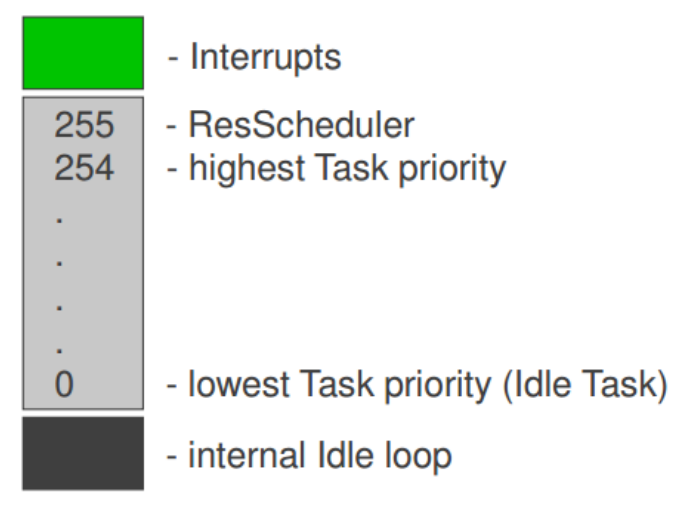
0是最低优先级
254 是最高优先级
255 是预留给资源的优先级调度器
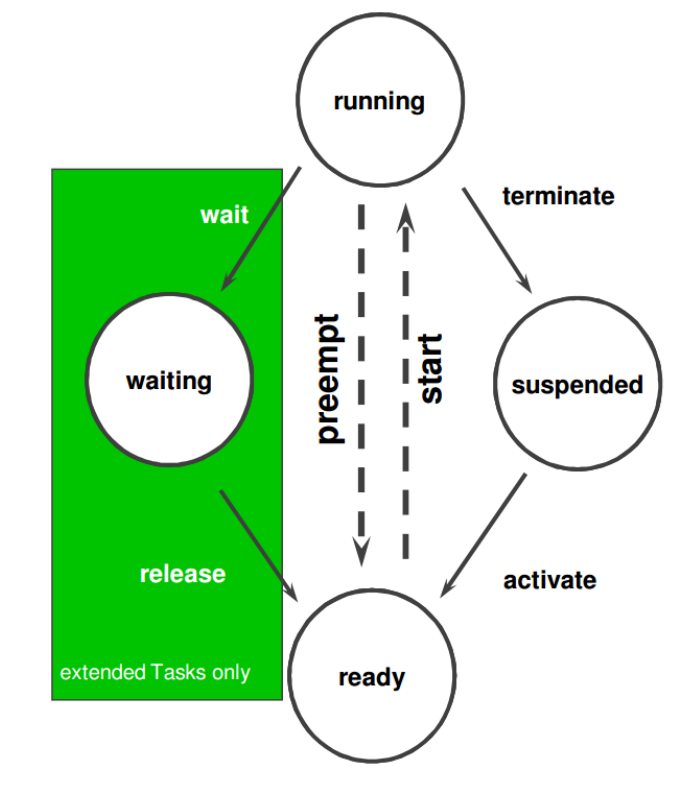
任何Task都有四种可能的状态,并伴有明确的转换流程
激活始终是外部触发的
从"ready"到"running"以及再返回"ready"仅通过调度实现
终止仅由Task自身触发
等待事件的执行也由任务自身完成
从"wait"到"ready"的转换仅由外部事件触发
不具备wait状态的任务被称为basic tasks,其余的则为extended tasks
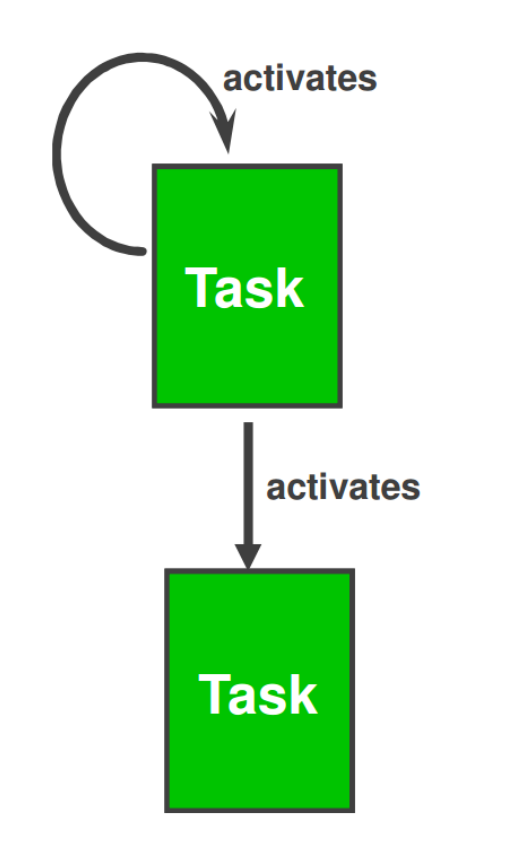
一项Task可以激活任何其他Task,包括自身。
激活是执行Task的先决条件。
Task通常包含程序代码的主要部分。
应用程序的需求是通过Task之间的协作来实现的。
Scheduling
每个Task都可以通过以下两种方式之一进行调度:
• 非抢占式:
调度器始终运行具有最高优先级的就绪Task
较高优先级的Task不会抢占较低优先级的Task
Task切换仅在任务结束时发生
• 抢占式:
调度器始终运行具有最高优先级的就绪Task
较高优先级的Task会抢占较低优先级的Task
Task切换可以在任务运行时发生
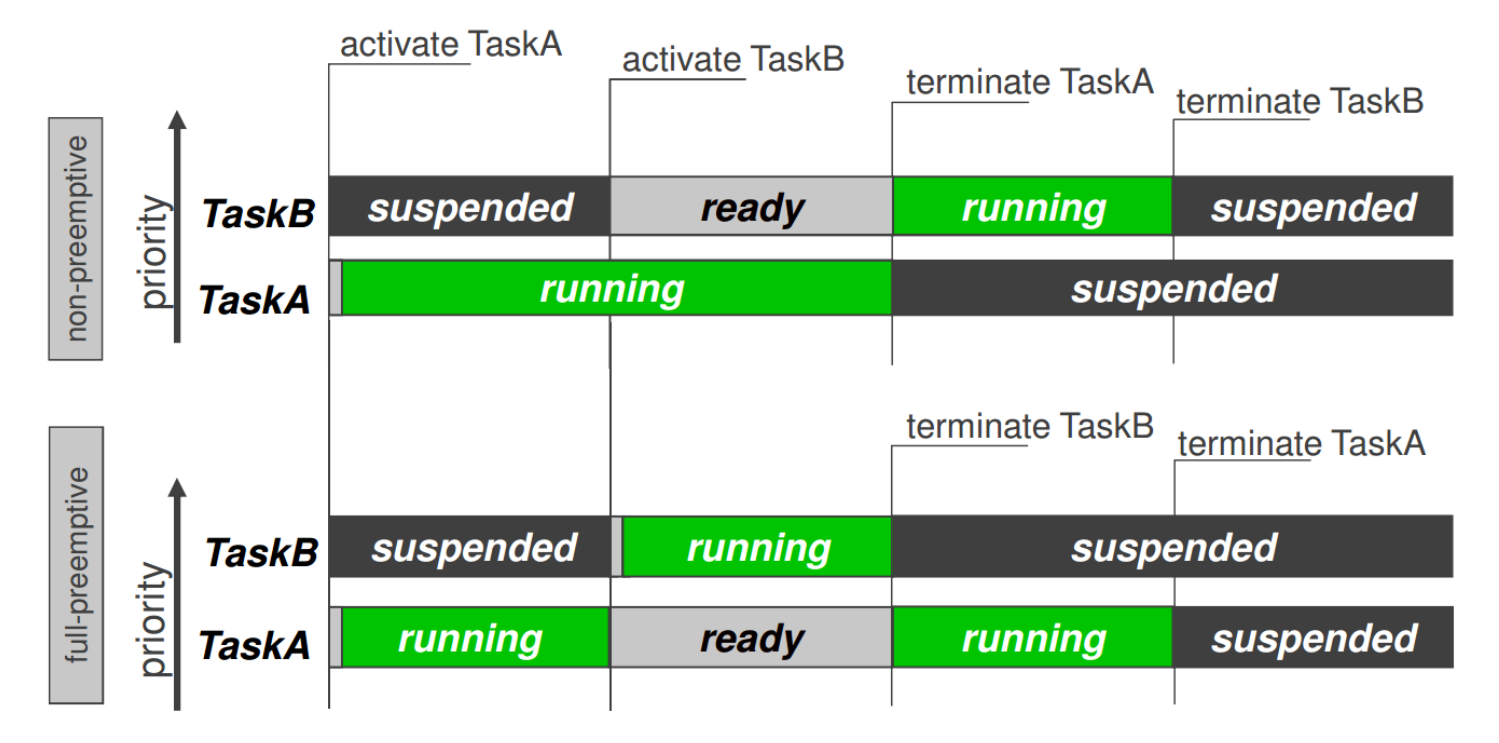
AUTOSAR 操作系统支持的应用范围内的调度策略
• 非抢占式:
所有任务均为非抢占式,即Task切换仅在任务通过等待或终止而释放 CPU 时才会发生
• 全抢占式:
所有任务均为抢占式,即在任何时候具有最高优先级的就绪Task都会被执行
• 混合式:
可以为每个任务单独设置其行为
可以通过调用 Schedule() 明确请求重新调度
调度将作为某些操作系统服务的一部分来执行
• 重新调度点:
-- ActivateTask()(仅适用于抢占式任务)
-- TerminateTask()
-- ChainTask()
-- SetEvent()(仅适用于抢占式任务)
-- WaitEvent()
-- ReleaseResource()(仅适用于抢占式任务)
-- Schedule()
-- IncrementCounter()(仅适用于抢占式任务)
-- 从中断服务程序返回(仅适用于抢占式任务)
任务堆栈
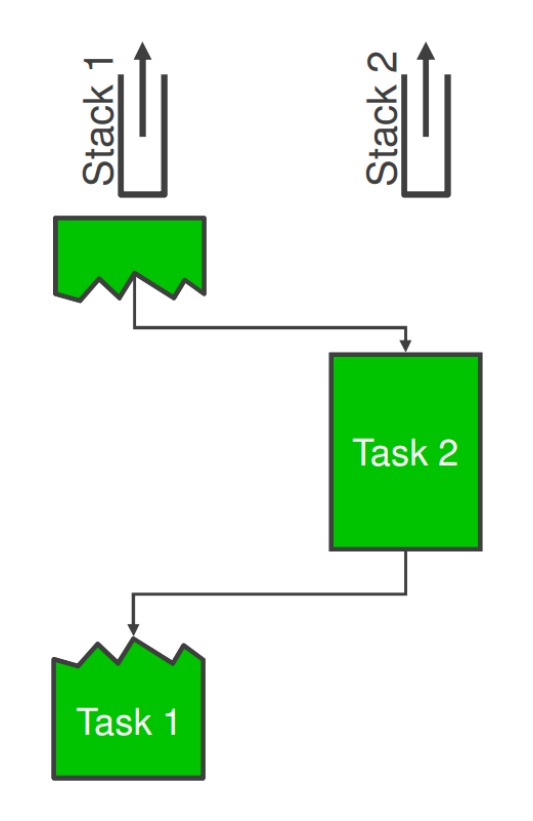
被中断的任务会从其被中断的那一点重新开始执行。
这需要保存相关上下文信息
• 寄存器集(尤其是程序计数器)
• 栈
• 本地变量
• 返回地址
因此,AUTOSAR 操作系统通常会为每个任务单独预留一个栈(→ 内存使用量)
在某些情况下,栈可能会在任务之间共享使用
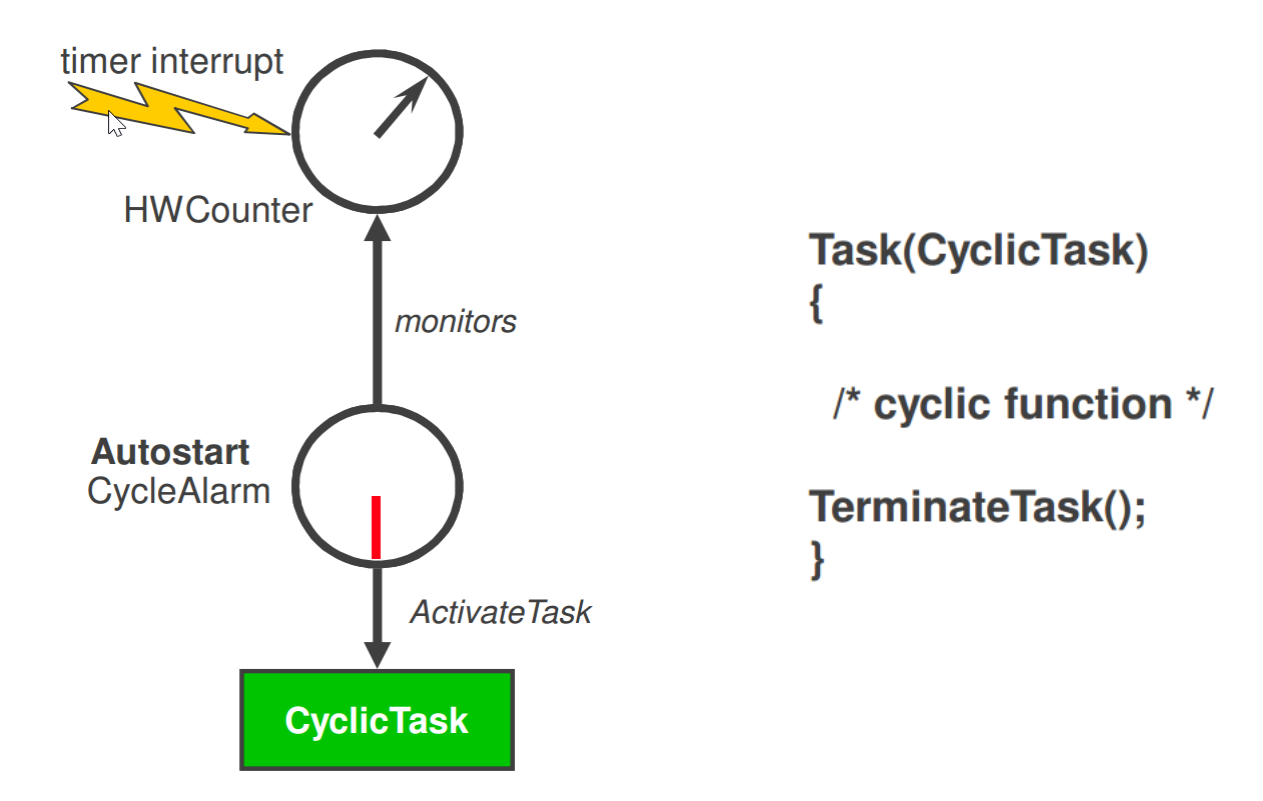
Counters和Alarms
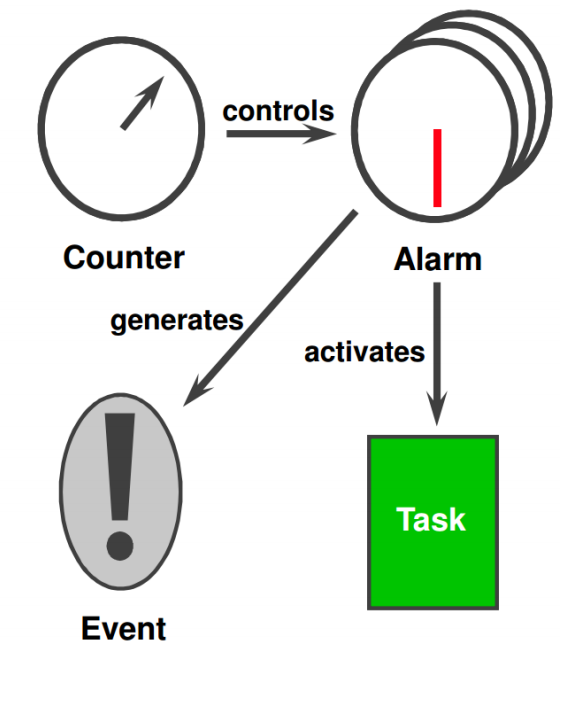
Alarm与一个Counter相关联,并会在达到特定计数值时自动结束。
Alarm到期会导致四种情况之一:
-- 事件的生成
-- 任务的激活
-- 回调函数的执行
-- 软件计数器的递增
举个例子,譬如用Alarm来周期触发basic task
Schedule Table
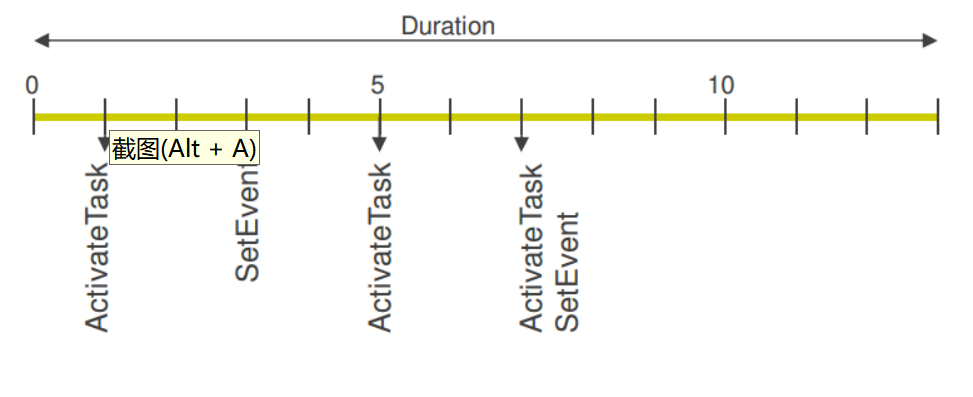
调度表是一组预定义的操作序列(到期点)
• 操作系统会遍历调度表并处理每个到期点
• 到期点上的操作
-- 激活任务(ActivateTask())
-- 设置事件(SetEvent())
• 调度表与一个计数器关联,该计数器提供底层的时间间隔测量
• 调度表可以相对于或绝对基于当前计数器值启动
• 调度表模式
-- 单次触发
-- 周期性触发
Events
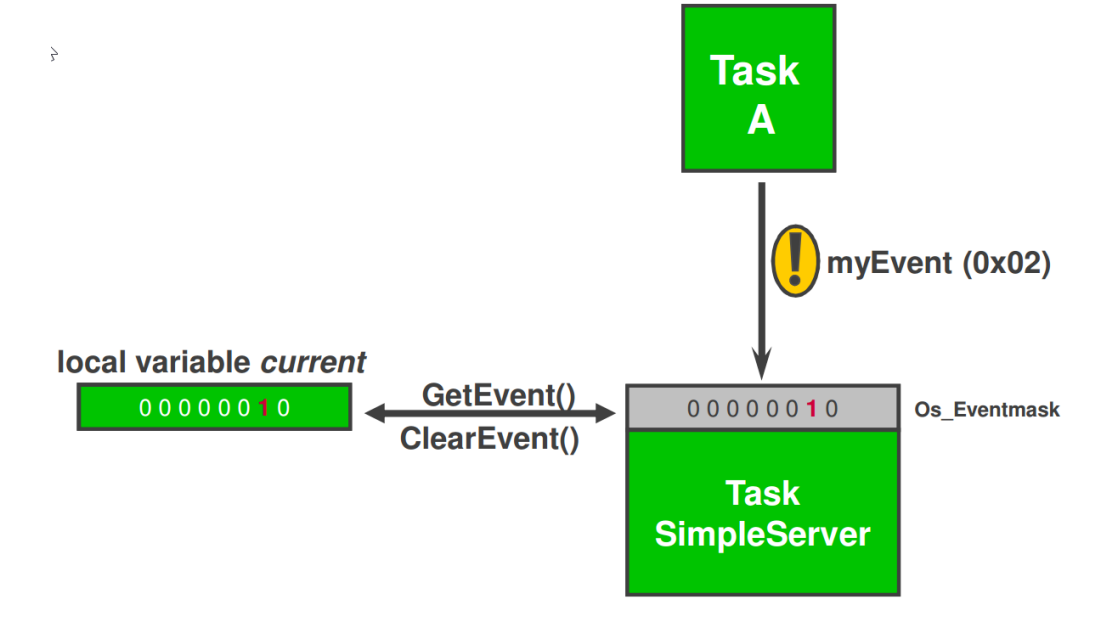
每个扩展任务有 8/16/32 位事件掩码
每个任务最多 32 个事件
Interrupts
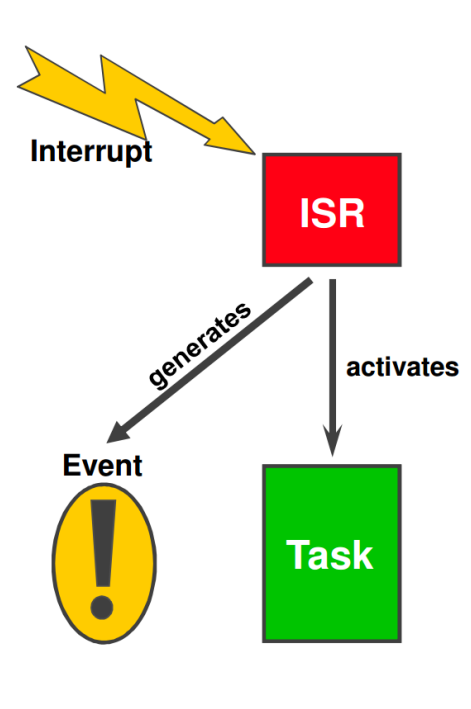
ISR 是由硬件中断请求直接触发的
ISR 的优先级高于所有任务,并会抢占任务
对 AUTOSAR API 函数的调用在 ISR 内部是受限的
ISR 应该小巧且运行速度快
ISR 可以激活任务或触发事件
带有阻塞功能的 ISR 会阻塞整个 AUTOSAR 系统
AUTOSAR 操作系统提供了两种不同的中断服务程序(ISR)类别:
• ISR 类别 1:
-
ISR 不能使用(大多数)操作系统服务
-
ISR 的执行优先级高于操作系统
-
行为类似于常规中断
-
完全绕过操作系统
• ISR 类别 2:
-
ISR 可以使用操作系统服务,例如激活任务等
-
ISR 在调度程序的控制下执行
-
操作系统在进入时会施加一些额外的延迟来设置 ISR 环境,并在退出时移除该环境
所有中断的执行优先级都高于任务的优先级