方案介绍
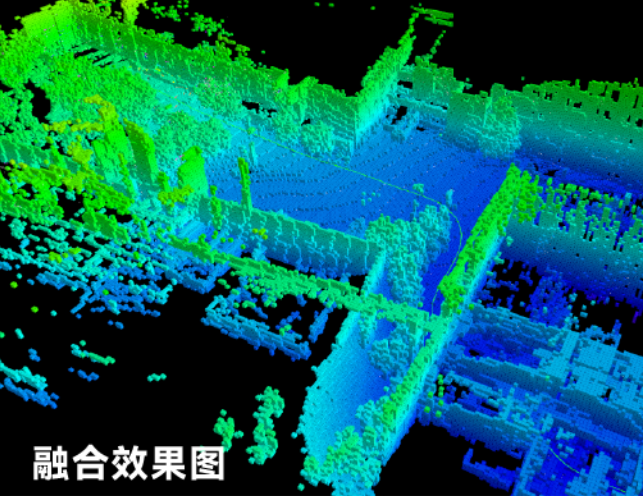
机器人-多路视觉边缘计算方案,依托旗下"利见"系列摄像头高分辨率、低延迟、多接口和宽动态范围等特性,能适应不同光线条件和场景,为机器人提供多维度视觉信息。基于高性能边缘计算平台,实现对多路视觉数据的实时处理和分析,赋予机器人强大的视觉感知和实时决策能力,可广泛应用于智能监控、工业自动化、物流仓储等高精度实时感知领域,为机器人提供"感知-决策-控制"一体化边缘智能支持。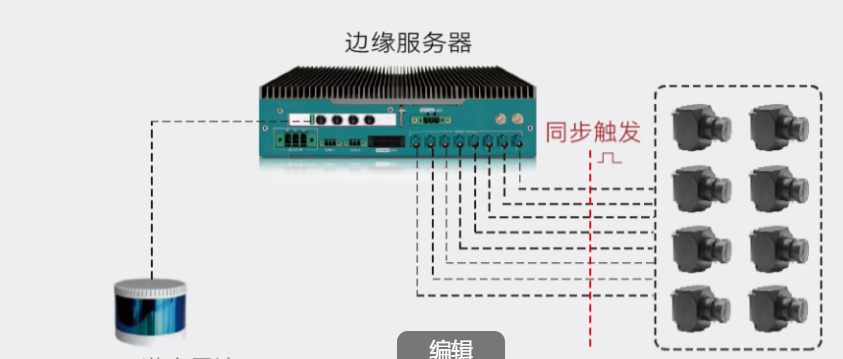
方案优势
高动态视觉
"独有技术",适应强光、弱光等复杂光线环境,确保稳定、精准的视觉输出。
支持>120dB HDR高动态成像
CMOS低光增强
多传感器精准同步
支持外部触发信号同步,多路摄像头可通过硬件触发引脚实现微秒级同步曝光,确保多视角图像采集的时间一致性。
外触发同步
微秒级同步曝光

实时边缘AI计算
依托Jetson AGX Orin™高达275TOPS INT8的AI算力,可实时运行多路视觉的BEV感知模型、3D目标检测等算法,满足机器人动态路径规划需求。
ARM系列平台
AI边缘计算

车规级可靠性
采用宽温抗震设计,保障复杂场景稳定运行。
IP67防护等级
-40°C至85°C的宽温范围
GMSL 2接口