在具身智能快速发展的背景下,高校作为人才培养的主阵地,亟需对接产业需求,加强相关专业建设。清华大学、复旦大学等高校已纷纷设立机器人工程、人工智能等专业,推动高素质技术人才培养。在机器人学习实践中,"数据"是核心要素。建设具身智能训练数据采集实训室,能够帮助学生高效获取高质量动作数据,支撑机器人强化学习与智能控制实践,有效衔接教学与产业应用。

*图片来源网络
广州虚拟动力作为动作捕捉领域的技术企业,面向机器人工程、机械工程、具身智能、自动化等专业,提供全链路动捕设备与数据转化培训方案。方案涵盖旗舰惯性动捕套装、专业动捕引擎、一站式数据转化软件、多平台开发插件及仿真案例资源包,助力构建"采集-处理-仿真-迁移"的一体化教学流程,提升学生在机器人智能控制方面的实战能力。
一站式数据转化平台:高效数据处理与修正工具
该平台支持动作数据采集、清洗、修正与重定向映射,可直接输出CSV格式标准数据集,适用于机器人强化学习与二次开发。平台兼容宇树G1机器人,支持动作重定向与人工微调,便于适配多样化应用场景,显著提升数据制备效率。

机器人/灵巧手仿真案例:虚实结合的安全实训
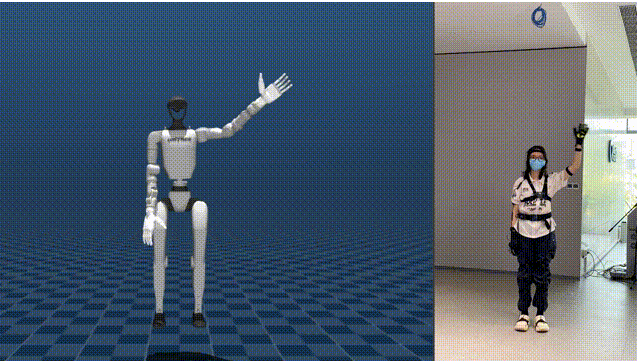
围绕仿真平台的机器人/灵巧手模型,虚拟动力打通了真人动捕数据到仿真平台模型重定向的技术路径,通过穿戴动捕设备学生可直接驱动仿真平台中的机器人模型,直观感受动作数据在机器人模型上的应用效果,通过不断的数据精修与优化调整,最终输出高质量动作数据用于实机迁移,不仅极大地提高了教学安全性、且降低了硬件设备损耗风险,是连接理论知识与工程实践的关键桥梁。
其中支持MuJoCo、RViz、Isaac Sim 仿真平台全身动作数据重定向,机器人模型包括宇树 G1 机器人,包含 23 自由度、29 自由度和 Comp 版本,;灵巧手模型包括宇树三指灵巧手 Dex3-1、因时五指灵巧手 DFQ 和 FTP版本。
针对以上仿真内容,可提供UDP 数据接收SDK、仿真驱动源代码部署、显卡驱动安装及测试MuJoCo 及 Isaac Sim 仿真环境搭建、及机器人及灵巧手仿真模型文件和使用说明服务,帮助学生快速搭建仿真环境进行模型驱动,减轻前期部署工作量,从而专注到人形机器人的训练控制当中。
本实训室方案以数据为核心,贯穿从动作采集到实机控制的全流程,为高校具身智能教学提供安全、高效、完整的实践平台,助力培养具备创新与实战能力的机器人领域专业人才。