在移动巡检机器人上实现管道跑冒滴漏的视觉识别,需结合硬件选型、图像采集、算法模型、边缘计算、功能集成五大核心环节,解决移动场景下的 "动态成像不稳定、漏点形态多样、环境干扰复杂" 三大关键问题。以下是具体实现方案的详细拆解:
一、核心目标与识别难点
在设计方案前,需先明确目标与挑战,确保技术路线针对性:
- 核心目标 :识别管道的 3 类典型缺陷 ------①跑(大量流体喷射 / 流淌) 、②冒(气泡 / 雾气溢出) 、③滴漏(间歇性滴落 / 持续性渗漏),并输出漏点位置、类型、严重程度(如滴速、流量估算)。
- 核心难点 :
- 动态干扰:机器人移动导致图像抖动,漏点(如小水滴)易与背景模糊重叠;
- 形态多样:漏点可能是水、油、气等不同形态(液体反光、气体透明、油污暗沉),且受光照(强光 / 阴影)、管道材质(金属反光 / 塑料哑光)影响大;
- 背景复杂:管道周边可能有阀门、支架、线缆等遮挡物,或灰尘、水渍等干扰项,易误识别。
二、第一步:硬件系统选型与部署
移动巡检机器人的硬件是视觉识别的 "眼睛" 和 "载体",需围绕 "清晰采集漏点图像" 和 "适配移动场景" 设计,核心组件包括图像采集模块、运动控制模块、边缘计算模块。
1. 图像采集模块(关键)
需同时满足 "高分辨率捕捉细节""多光谱覆盖不同漏点形态""抗抖动稳定成像" 三大需求,推荐配置如下: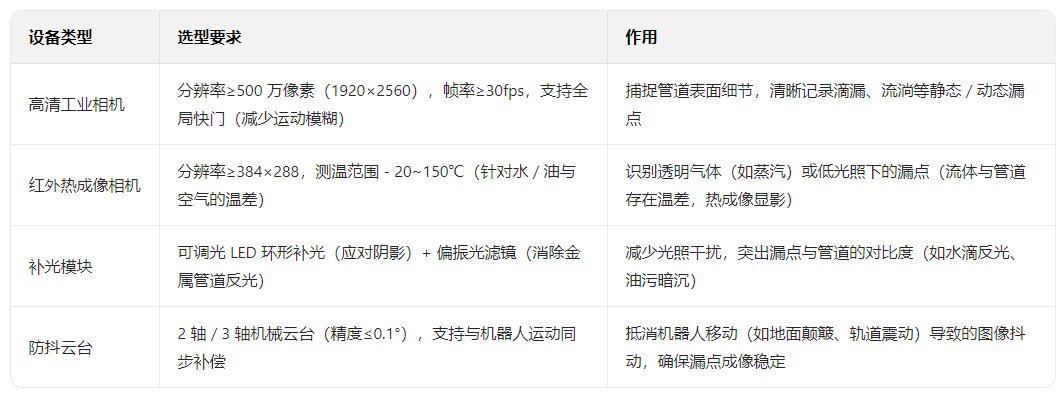
2. 运动控制与定位模块
需让机器人 "精准到达巡检区域" 并 "配合图像采集调整视角",核心组件:
- 移动底盘:根据场景选择(如管道廊道路面→轮式底盘,架空管道→轨道式底盘),支持定速巡航(0.1~0.5m/s,平衡效率与成像清晰度);
- 定位模块:GPS / 北斗(室外开阔场景)+ UWB 超宽带定位(室内 / 管道廊道,精度≤10cm),同步记录漏点的物理坐标(便于后续维修);
- 视觉引导:通过前置相机识别管道法兰、阀门等特征点,自动调整云台角度(确保相机垂直对准管道表面,减少透视变形)。
3. 边缘计算模块
移动机器人无法依赖云端实时处理(延迟高、信号不稳定),需在本地部署边缘计算单元:
- 硬件选型:NVIDIA Jetson AGX Orin(算力 200TOPS,支持多相机并行处理)或华为昇腾 310B(低功耗,适合电池供电机器人);
- 核心功能:实时接收多相机图像数据、运行 AI 识别模型、输出漏点结果(本地存储 + 4G/5G 上传至云端平台),延迟需≤100ms(避免漏点遗漏)。
三、第二步:图像预处理 ------ 提升漏点识别基础
移动场景下采集的原始图像存在抖动、反光、噪声等问题,需通过预处理 "增强漏点特征",为 AI 模型提供高质量输入,核心步骤如下:
-
图像去抖与对齐
- 基于云台的 IMU 惯性传感器数据,通过 "运动补偿算法"(如光流法)修正图像抖动:计算相邻帧的像素偏移量,对模糊帧进行像素重映射,恢复漏点的清晰形态;
- 多相机图像对齐:将 RGB 图像与红外热成像图像通过 "特征点匹配"(如 SIFT 算法)叠加,形成 "RGB + 红外" 融合图像(例如:RGB 识别可见水滴,红外识别透明蒸汽)。
-
干扰抑制与特征增强
- 消除反光:通过偏振光图像的 "偏振角分析",过滤金属管道表面的镜面反射(保留漏点的漫反射特征);
- 对比度增强:对管道区域进行 "区域分割"(用语义分割模型提取管道主体,排除背景的支架、线缆),再通过 "直方图均衡化" 或 "Retinex 算法" 增强漏点与管道的灰度差异(如:水滴呈亮白色,管道呈暗灰色);
- 噪声过滤:用 "高斯滤波" 去除图像噪声,用 "形态学运算"(如开运算)消除小尺寸干扰(如管道表面的灰尘斑点,避免误识别为漏点)。
四、第三步:AI 识别模型 ------ 核心漏点检测算法
1. 模型选型:兼顾精度与速度
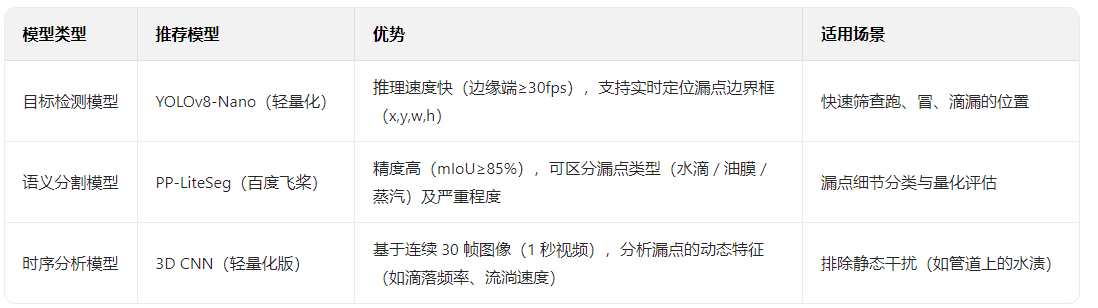
管道跑冒滴漏的识别需结合 "目标检测"(定位漏点位置)与 "语义分割"(区分漏点类型),且模型需适应 "多形态漏点" 和 "复杂环境",推荐采用 "轻量化深度学习模型 + 场景适配训练" 方案。
2. 数据集构建:决定模型泛化能力
AI 模型的精度依赖 "高质量、多场景" 的标注数据集,需覆盖不同管道类型、漏点形态、环境条件:
- 数据采集 :
- 场景覆盖:金属管道 / 塑料管道、水 / 油 / 气介质、强光 / 阴影 / 夜间、干净 / 油污管道表面;
- 漏点类型:人工模拟 "滴漏"(1~5 滴 / 分钟)、"流淌"(0.1~1L/h)、"喷射"(1~5L/h)、"蒸汽冒溢"(压力 0.1~0.5MPa),同步采集 RGB + 红外图像;
- 数据标注 :
- 目标检测标注:用 LabelImg 标注漏点的边界框,标签包括 "滴漏""流淌""喷射""冒溢";
- 语义分割标注:用 LabelMe 标注漏点的像素级区域,额外标注 "漏点面积""滴落频率" 等量化信息;
- 数据增强:通过 "旋转、缩放、亮度调整、添加噪声" 等方式扩充数据集(原始数据 1 万张→增强后 10 万张),避免模型过拟合。
3. 模型训练与优化
- 训练策略:采用 "迁移学习"(基于 COCO 数据集预训练的 YOLOv8 模型),先在通用漏点数据集上训练(学习漏点的通用特征),再用特定场景数据(如某工厂的管道图像)进行 "微调"(适配场景细节);
- 模型优化:通过 "模型剪枝""量化"(将 32 位浮点数模型转为 16 位 / 8 位整数模型)降低计算量,确保在边缘端的实时性(如 YOLOv8-Nano 量化后,推理速度提升 50%,精度损失≤2%);
- 精度验证:用测试集(2 万张图像)验证模型,核心指标需满足:漏点检测率≥95%(不漏检),误检率≤3%(不将灰尘、水渍误判为漏点)。
六、关键性能指标与测试验证
方案落地前需通过实地测试验证,核心指标如下:

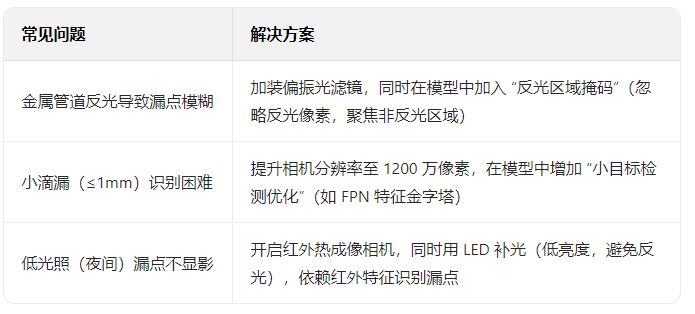
七、常见问题与解决方案
通过以上方案,移动巡检机器人可实现管道跑冒滴漏的 "全自动、高精度、实时化" 识别,替代人工巡检(降低人力成本,避免人员进入高危管道区域),同时为管道维护提供数据化支撑,减少漏点导致的资源浪费与安全隐患。
编辑分享