摘要
业界已开展大量工作,旨在重新审视自动驾驶系统(ADS)开发的验证方法。在行业层面,主流趋势是将适用于车载电子设备的设计 - 验证方法(依据 ISO 26262 标准)扩展到自动驾驶功能(预期功能安全性,SOTIF)。目前,业界普遍认为,现有验证方法无法应对自动驾驶带来的挑战。自动驾驶的核心是一种革命性理念 ------ 系统取代人类主导驾驶过程,这要求在理念和方法上做出变革,并重新考量风险的规模。因此,采用基于多场景的方法具有重要意义:结合事故学数据与专业知识,构建一套具有代表性的仿真测试案例数据集。这正是莫萨尔(MOSAR)场景库的核心目标。
1、引言
新的验证方法仍需考虑现有技术,并整合各类知识以确保测试的良好代表性。由于验证工作需收集数百万公里的行驶数据,汽车行业已达成共识:相较于对全部收集数据进行全面评估,基于相关且具代表性的驾驶场景与事件(结合事故学数据和专业知识)对自动驾驶系统进行验证,能更有效地评估其安全性。
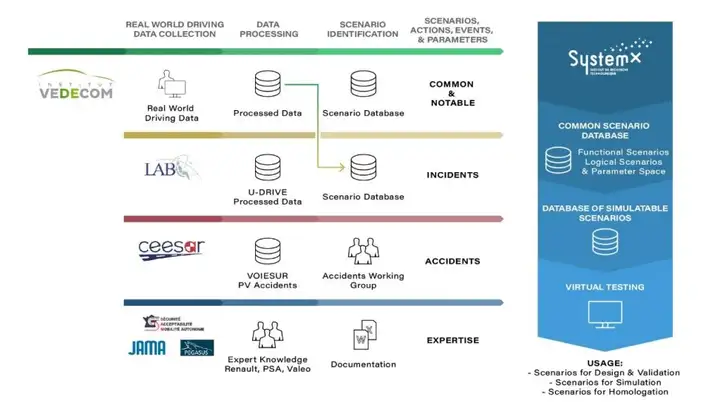
图1、整合数据源与知识,构建用于自动驾驶系统设计与验证的场景库
2、VEDECOM与SystemX的合作
在此背景下,专注于个人化、无碳可持续出行的研究机构 VEDECOM 于 2016 年启动了驾驶数据收集与相关场景提取工作。为此,VEDECOM 设计了一套整合多种异构传感器与车辆仪表的架构。此外,通过构建车辆周边环境模型,可实现场景分类与统计推断。
专注于复杂系统数字工程的研究机构 SystemX 对上述工作进行了补充。为解决自动驾驶安全性与场景标准化问题,SystemX 构建了道路场景库,并开发了莫萨尔(MOSAR)平台 ------ 即 "安全性评估与稳健性分析的方法与工具"。基于 "软件即服务"(SaaS)架构和通用数据模型,场景管理器允许 SystemX 的合作伙伴通过网页界面,在安全共享的场景库中描述其场景。这些场景随后可用于设计、仿真、验证与认证工作。
此项工作是三步法的第一阶段,具体步骤如下:
-
在 L3 级自动驾驶系统投入使用前,收集驾驶场景与数据;
-
在法国汽车协会(PFA)项目框架下,补充来自 L3 级和 L4 级自动驾驶原型系统的场景;
-
当自动驾驶系统正式投放市场后,从量产车辆中获取新场景。
本文旨在介绍这两家研究机构在构建大型驾驶数据集与标准化场景库方面的工作。
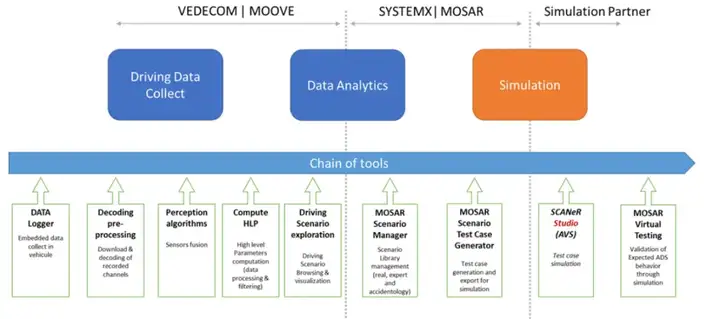
图2、从数据收集到仿真的价值链
3、驾驶场景的收集与提取
基于驾驶情境与环境分析的场景
为应对并安全处理危害情境,人类驾驶员需与环境互动并充分考虑环境因素。这里的环境包括其他道路使用者、道路基础设施及天气条件。要验证自动驾驶系统,需完整还原车辆所处环境,这可通过在开放道路上使用搭载多种传感器的车辆采集数据库来实现。VEDECOM 研究所于 2016 年启动穆夫(MOOVE)项目,目标便是采集并分析此类数据库,以识别和分类显著驾驶情境。
穆夫(MOOVE)数据库的采集
穆夫数据库通过 6 辆雪铁龙 C4 毕加索(C4 Picasso)汽车采集,每辆车均配备相同的数据采集系统。该系统包含 24 种不同传感器,如摄像头、雷达、激光雷达(lidar)、全球导航卫星系统(GNSS)等。这些车辆由专业驾驶员驾驶,驾驶员严格遵守交通规则,其驾驶行为与自动驾驶车辆的要求高度一致。
数据库的采集主要集中在分隔道路上。截至目前,已在西欧 17 个国家记录了超过 100 万公里的行驶数据,对应 1.6 万多小时的记录内容,数据库总容量达 280 太字节(TByte),包含超过 4 万条记录。采集工作重点关注两类主要情境:
· 交通拥堵情境:主要集中在巴黎地区及欧洲其他主要城市,也包括节假日出行高峰时段;
· 畅通高速公路情境:在交通顺畅的背景下,记录了西欧大部分高速公路的行驶数据。
此外,由于采集车辆在至少 3 年内几乎每天都有行驶记录,数据库涵盖了各类驾驶条件。
穆夫(MOOVE)数据建模
VEDECOM 定义了包含 100 个高等级参数(HLP)的分类体系,这些参数涵盖道路场景中的所有物体与参与者。所开发的算法利用这些参数实现以下功能:
· 事件检测(车辆在车道内的移动、变道、超车等);
· 驾驶员行驶路线跟随或应对其他车辆行为的动作检测;
· 道路基础设施组件还原(可行驶道路边界、车道、标线、交通标志等);
· 场景发生的时间序列与气候条件还原。
需注意的是,传感器的技术性能存在局限性。因此,VEDECOM 针对每个参数、事件、动作或时间序列开发了专用算法,以最大限度提升其稳健性(包括预测计算、优化滤波器、单传感器数据融合、多传感器数据融合、轨迹预测等技术)。为验证算法有效性,研究人员通过实地实景视频对信号进行人工标注,以检测算法的误报(假阳性)与漏报(假阴性)情况。
为分析驾驶情境,穆夫项目开发了一种特定方法:利用采集数据中的原始信号,实现场景的自动检测。
穆夫的数据采集方法可从 24 种不同传感器中记录超过 500 个信号。这些原始信号属于低层级信息,与传感器输出直接相关。为构建易于使用的数据库,研究人员建立了一个数据模型,其中包含关于主车(即搭载数据采集系统的车辆)驾驶环境的高层级信息。
这些高等级参数(HLP)的定义独立于数据源,并被划分为 4 个不同层级(见图 3),随后用于检测特定事件。这些事件代表主车环境中来自其他道路使用者、基础设施甚至道路障碍物的约束条件。
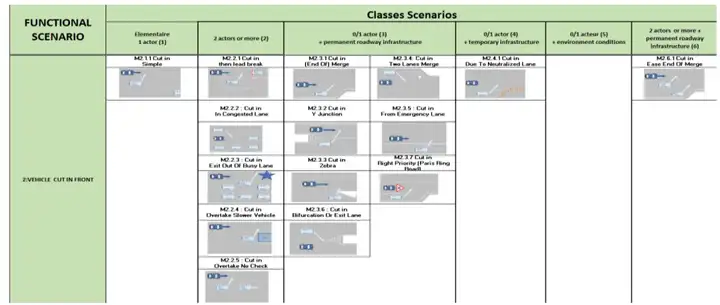
图3、驾驶场景的识别与分类
事件的时间序列构成驾驶场景。通过检测这些时间序列,可实现场景的检测、提取与分析。
驾驶场景的识别与分类
场景的定义基于两个来源:一是来自现有分类体系的预定义常见场景;二是在穆夫数据库中观察到的新的、罕见的 "显著" 场景(Notable)。借助这一定义表(场景示例见图 3),可针对每个场景分析驾驶环境。首先,需识别相关场景并从数据库中提取,这一过程通过根据一组专家规则交叉验证高等级参数(HLP)的特定值来实现。在此步骤中获得的事件可按时间序列关联,进而构建场景。利用这些规则,可在数据库中检测出尽可能多的不同场景实例,随后可对识别出的场景进行统计描述。
4、驾驶场景分析示例
利用上述规则,例如,研究人员检测到了 40 万个不同的 "切入"(cut-in,指其他车辆切入主车行驶车道)场景。这使得研究人员能够分析特定高等级参数(HLP)、事件与动作集合的分布情况。场景的描述(功能层面与逻辑层面)以及表征场景的特定值分布,是穆夫项目的输出成果,同时也是 SystemX 项目中莫萨尔(MOSAR)场景库的输入数据。
场景库
随着 ISO 21448(预期功能安全性,SOTIF)标准的推出,将现有挑战性场景整合到通用数据库中变得至关重要。在此背景下,法国 SystemX 研究所正构建法国自动驾驶场景库,该库采用标准场景数据格式,并基于名为莫萨尔(MOSAR)的特定 "软件即服务" 平台。
场景与标准化:数据格式、标准定义
为给法国汽车行业建立适用于 SAE 3 级及以上自动驾驶系统(ADS)的共享场景目录,研究人员首先统一了相关术语定义。此项工作基于多篇文献(这些文献的观点与德国 PEGASUS 项目的理念相近),同时参考了软件与系统工程领域的规范和标准。部分定义已纳入 ISO 21448(SOTIF)标准,其他定义则拟纳入 ISO 34501、34502、34503、34504 标准(这些标准涉及自动驾驶系统的运行设计域(ODD)与场景标准化)。
场景数据模型的构建以此为基础,同时结合了 SystemX 在 ASAM(汽车及测量系统标准化协会)OPENSCENARIO 讨论中的参与成果。场景描述参数的选择遵循 "最大兼容性" 原则,确保能覆盖不同输入数据库中使用的绝大多数参数。
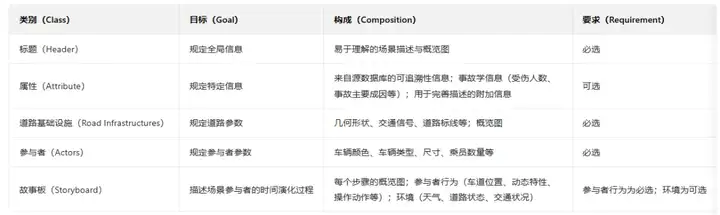
表 1、场景参数范围
场景库中的初始场景
该场景库初期将包含以下场景:
-
来自穆夫(MOOVE)项目的常见场景与显著场景,即从真实驾驶中采集的场景。其中,常见场景是发生频率较高的场景(如切入、切出、车道保持等);显著场景是由穆夫项目的专业驾驶员判定为具有危害性的罕见场景。这类场景总数超过 10 万个。此外,通过检测弗吉尼亚理工交通研究所(VTTI)定义的安全相关事件(SRE)与安全关键事件(SCE),补充了事故场景。
-
事故场景:结合自动驾驶功能的初期开发需求,从 VOIESUR(法国道路事故数据库)中筛选出发生在高速公路和分隔道路上、涉及至少一辆乘用车或商用车的事故作为研究背景。样本中排除了发生在高速公路互通式立交、入口匝道和出口匝道的事故。经加权处理以符合全国统计代表性后,最终包含 258 起原始事故和 2429 起道路事故档案。
莫萨尔(MOSAR)------ 场景管理器
莫萨尔(MOSAR)全称为 "安全性评估与稳健性分析的方法与工具"(Methods and Tools for Safety Assessment and Robustness analysis),是 IRT SystemX 开发的一个平台,支持名为 "场景管理器" 的软件应用。该软件采用 "软件即服务"(SaaS)模式,提供场景管理功能,场景可存储在私有容器、与合作伙伴共享的容器或公共共享容器中。
基于通用数据模型,场景管理器允许 IRT SystemX 的合作伙伴通过网页界面,在安全共享的场景库中描述其场景。这些场景随后可用于设计、仿真、验证与认证工作。
莫萨尔(MOSAR)平台得到了法国汽车制造商协会的支持,并已被国际汽车制造商组织(OICA)收录。
5、结论
本文阐述了从车辆数据采集到场景库构建的完整流程,该场景库旨在收集和整合用于交通拥堵辅助驾驶(SAE 3 级)设计与验证的相关场景。此类场景库对于满足 ISO 21448 安全标准(SOTIF)要求,或在认证过程中通过 SAE 3 级自动驾驶系统审核至关重要。
上述工具、流程与场景库正逐步产业化,以供法国标致雪铁龙(PSA)和雷诺(Renault)等制造商使用,且对汽车行业具有长期价值。由于此项工作规模庞大,仅靠单一地区难以扩展,未来需更多合作。
在近期规划中,该场景库将适配城市及城郊自动驾驶系统,并纳入来自 SAM 项目(法国自动驾驶系统试验项目,始于 2019 年,包含 15 项以上自动驾驶系统试验)中 L3 级和 L4 级自动驾驶系统真实道路测试的相关场景。