- 不同电梯品牌(三菱、迅达等)的梯控安装技术规范与适配方案
- 梯控设备选型标准,包括读头类型、控制器规格与网络配置要求
- 电梯门禁施工中的安全操作规程与故障应急处理方法
- 梯控系统与机器人调度系统的联调技术要点
- 新型电梯(如无按键触摸屏电梯)的梯控安装创新解决方案
前言 :本文系统梳理了电梯门禁控制系统(梯控)的安装与调试全流程。主要内容包括:1)施工前需停运电梯并确认设备状态;2)门禁兼容性测试要点,重点区分线路类型及品牌差异;3)设备安装四步流程,涵盖读头固定、控制器部署等关键环节;4)调试阶段需复查接线并测试各项功能;5)机器人联调需对接通讯协议并验证安全机制;6)针对三菱、迅达等特殊品牌提出定制解决方案。全文强调标准化操作,要求施工不影响电梯原生功能,并确保机器人召梯成功率≥99.9%,同时提供了设备防护、故障排查等实用建议。
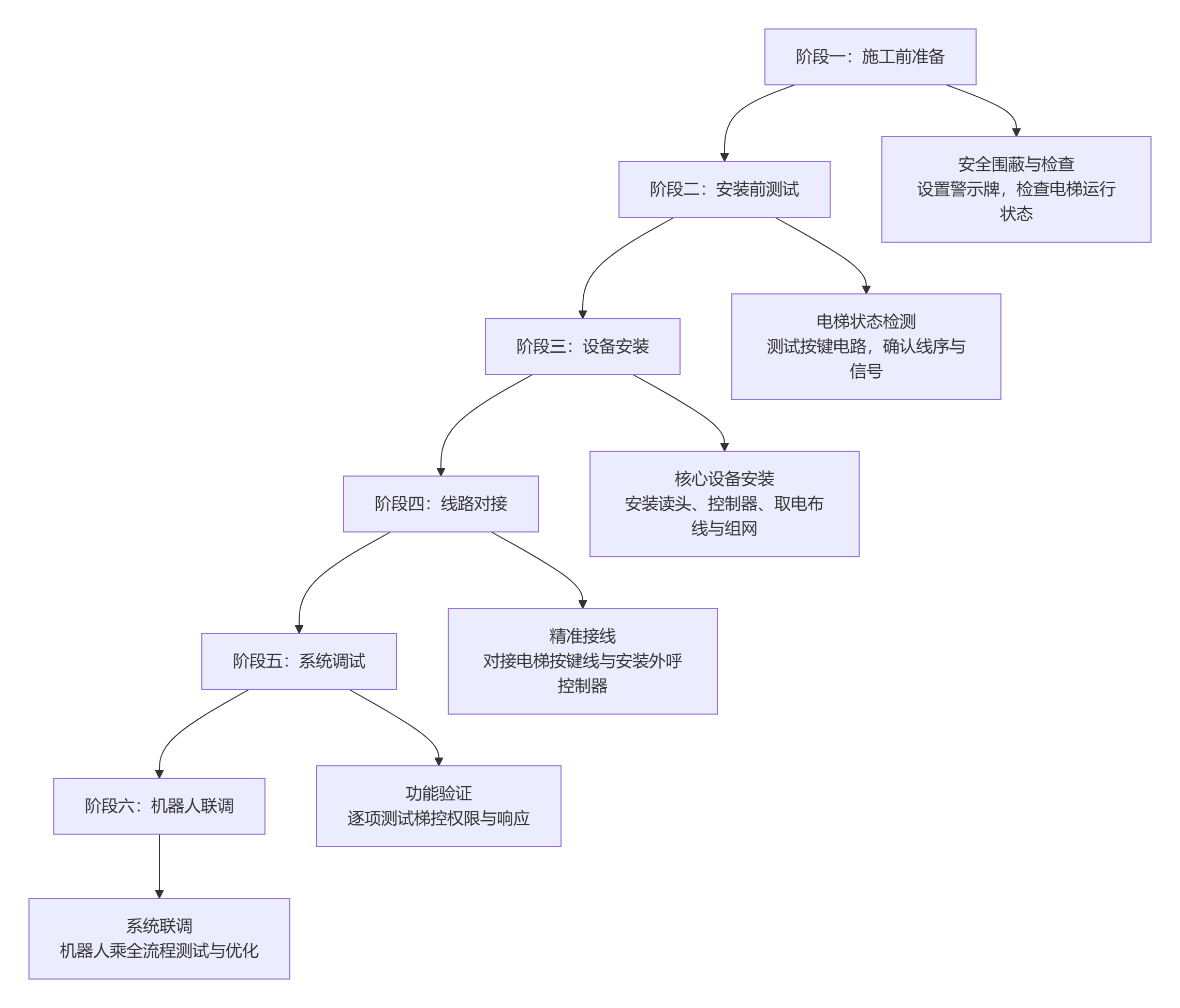
一、施工前准备与安全规范
- 电梯停运与警示
- 正式停用电梯,设置物理隔离栏及"电梯检修"警示牌。
- 查验电梯维保记录,确认设备无故障史。
- 功能预检
- 测试所有楼层按键响应状态(点亮/触发运行)。
- 全程需电梯维保单位人员陪同操作。
-
工具与材料准备:
-
工具:螺丝刀、电钻、锤子、开孔器、万用表(用于电路测试)等。
-
材料:包括电梯门禁读卡器、IC电梯卡、线缆(推荐RVV3×2.5mm²规格的屏蔽线)、保护膜、绝缘胶带等。防护用品如手套和清洁剂也必不可少,以避免安装过程中的污染或损伤。
-
线缆选择需根据设备传输距离和场景确定,例如读卡器与控制器间优先采用RS-485协议,以延长信号传输距离并减少干扰。
-
-
型号选择与差异:
-
明装式读头:适用于普通电梯面板,开孔直径约20mm,安装简便。
-
嵌入式读头:需开88×55mm方孔(玻璃材质建议90×58mm),读头厚度约3cm,美观但安装复杂。
-
人脸识别读头 :推荐安装在轿厢顶部,以避免用户操作不便和环境干扰。
选择型号时,需结合电梯类型和使用场景评估,确保与电梯系统兼容。
-
二、电梯门禁兼容性测试要点
| 测试项目 | 关键注意事项 |
|---|---|
| 按键通电检测 | 确保电梯非节能休眠状态(按键需有电信号) |
| 线路类型识别 | 区分两线制(国产梯常见)或三线制(线序可能分层错乱) |
| 特殊品牌处理 | 三菱、迅达及触摸屏电梯必须提前联系厂商确认方案 |
| 已装梯控干扰 | 避免直接测量,优先获取原线路图纸 |
⚠️ 提示:测量信号线需使用万用表(直流电压档),避免短路。
三、设备安装与布线流程
步骤1:基础操作
- 将电梯降至最低楼层 ,切换至检修模式。
- 由维保人员打开COP(轿厢操作面板)。
步骤2:读头安装
- 明装:直接固定在面板外侧。
- 嵌入式 :
- 面板开孔(必须断电操作)
- 读头与按键面板持平,避免凸出/凹陷。
步骤3:控制器部署
| 项目 | 操作规范 |
|---|---|
| 取电 | 优先从检修盒插座取AC220V,或内部接线(需加装漏电保护) |
| 节能模式规避 | 加装稳压模块防止断电重启 |
| 轿顶设备 | 控制器/无线网桥/状态采集器需防水防震固定 |
步骤4:线路对接
- 按键控制线 :
- 按电梯品牌线路图(务必索取原厂图纸)截取按键线路。
- 使用绝缘端子压接,避免虚接。
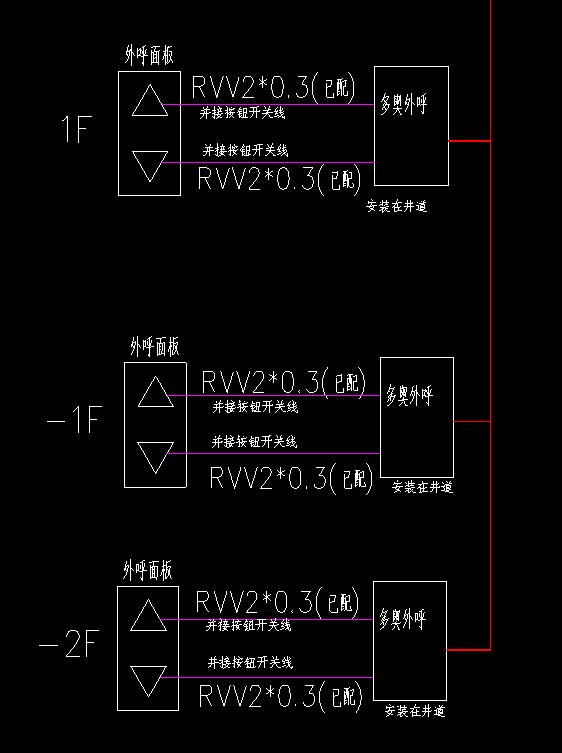
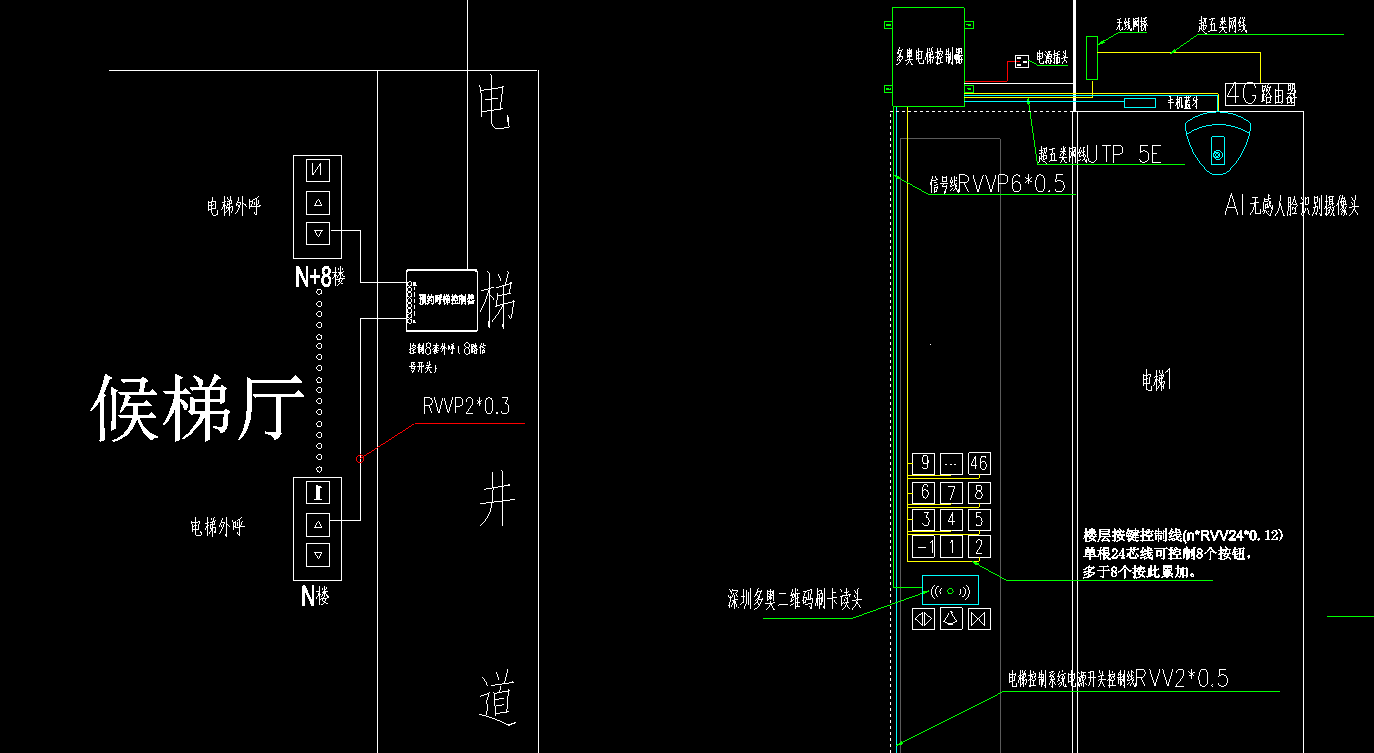
- 外呼控制器:每层电梯厅安装,粘贴对应楼层标签。
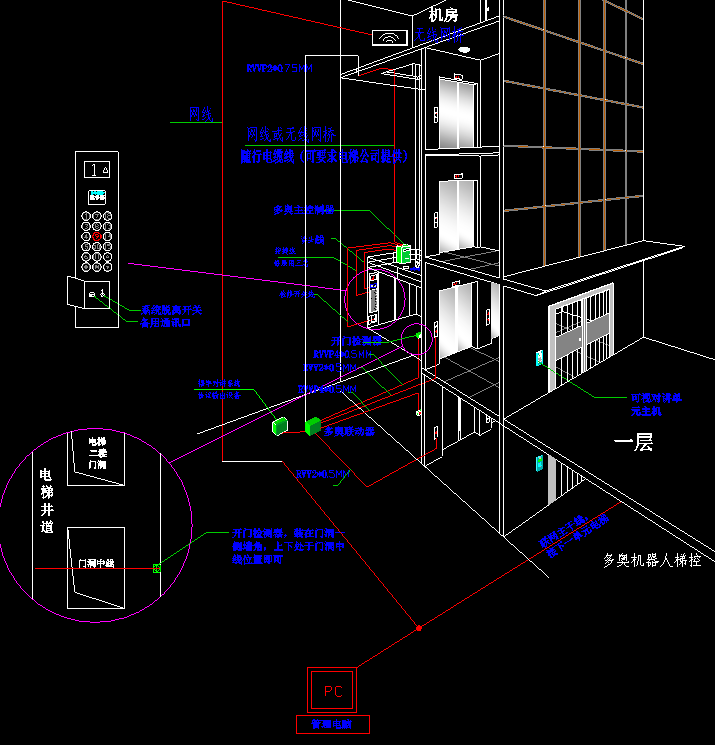
位置选择:
读头应安装在电梯厢内视线范围内,距地面1.2-1.5米的高度,便于用户操作。
远离金属干扰源(距离≥30cm),避免阳光直射或高温环境,以防设备故障或信号衰减。
• 具体安装流程:
-
开孔与固定:使用电钻和开孔器在电梯面板上钻孔(根据读头型号选择孔径),然后将读头固定到位。嵌入式读头需精确对齐孔位,并用螺丝紧固。
-
布线连接:将线缆(如RVV3×2.5)连接到读头和梯控控制器。控制器通常安装在电梯控制柜内,接线时需确保电源分离:主电源使用独立回路,避免与电梯原有系统共用电源线,防止电磁干扰。
-
设备调试:使用万用表测试电路连通性,确认无短路后通电。梯控控制器应与电梯系统隔离连接,避免影响电梯原有功能;通电后需配置软件参数,如卡片授权和识别方式。
-
防护处理:安装后贴上保护膜,防止污损,并用绝缘胶带包裹裸露线头,确保安全。整个过程需穿戴手套,保持环境清洁。
四、调试阶段核心步骤
- 接线复查
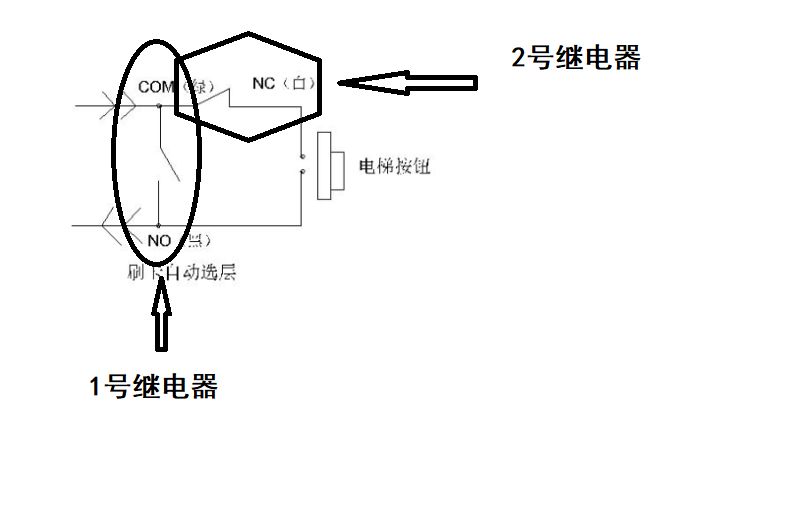
- 核对控制器与电梯按键接口的线序一致性(重点检测常开/常闭信号)。
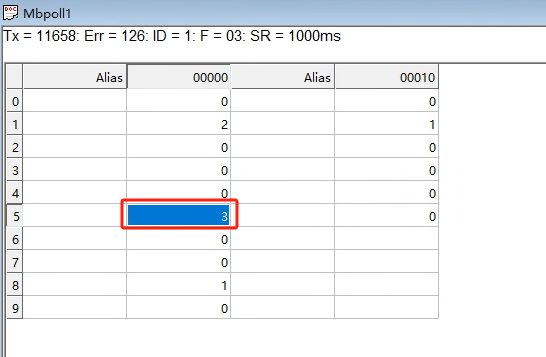
- 梯控功能测试
- 使用多奥Demo程序验证:
- 权限卡(单层卡/通卡)
- 轿厢状态实时读取(开关门/上下行)
- 急停开关联动响应
- 使用多奥Demo程序验证:
- 电梯恢复运行
- 撤除检修模式,重启电梯并观察待机功耗。
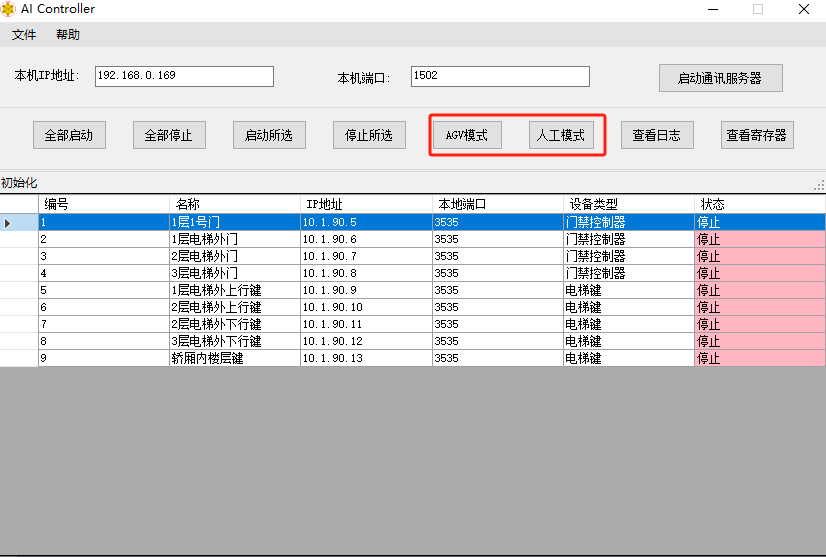
五、机器人(AMR/AGV/机器狗)联调流程
-
通讯协议对接
- 通过TCP/IP或RS485连接机器人调度系统与梯控主机。
-
指令测试
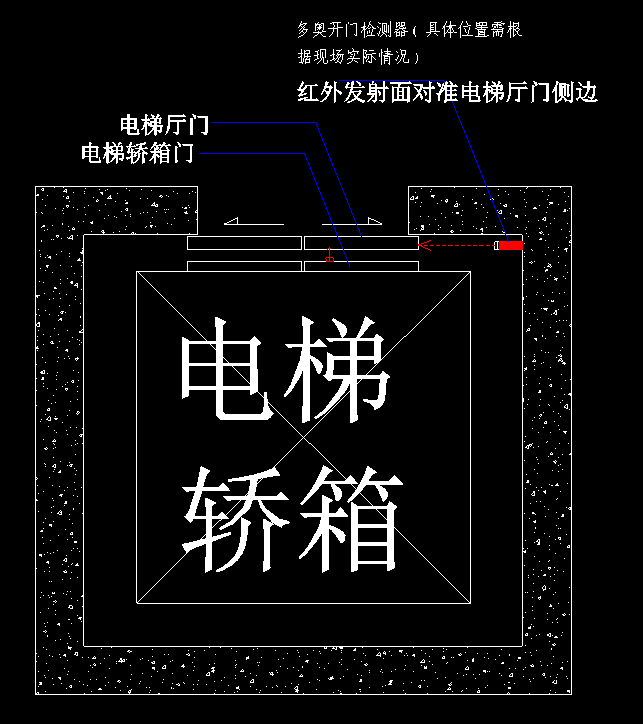
功能 测试项 召梯 机器人发送目标楼层至梯控 开门 电梯到位后自动开门(红外防夹触发) 关门 延时关门指令(默认5-8秒) -
安全验证
- 模拟机器人进出时的门禁互锁(电梯门未关则禁止移动)。
- 撤销警戒线前完成3次连续无故障运行。
电梯调试工作是检验安装质量和确保梯控功能正常运行的重要环节。施工接好线恢复电梯按键面板前,需仔细检查接线情况,对应线头及接口不能接错,确认无误后才能送电调试功能。电梯恢复运行后,要全面检测梯控所有功能,使用多奥demo测试程序进行调试,如调试卡单层、通卡功能,电梯轿厢运行状态读取,开关门及上下行监测等,确保各项功能都能正常、稳定运行。
六、品牌差异特别处理清单
| 电梯类型 | 应对方案 |
|---|---|
| 三菱/迅达 | 定制信号隔离模块,避免强电干扰 |
| 触摸按键电梯 | 加装模拟按键信号发生器 |
| 无按键触摸屏 | 需接入电梯CAN总线解码协议 |
实现机器人自主乘梯的最后一步,也是技术要求最高的一步。
-
协议对接 :确保梯控系统与机器人调度系统之间的通信协议(如MQTT、HTTP API)畅通无阻。通信的低延迟(建议≤5秒心跳)和高可靠性是关键。
-
安全流程联调 :模拟完整的机器人乘梯流程:机器人召梯 -> 电梯到位并开门 -> 人体/货物检测器确认轿厢安全 -> 机器人进入 -> 机器人发送目标楼层 -> 电梯运行 -> 机器人离开。每一步都必须有状态反馈和超时重试机制。
-
异常处理测试:重点测试网络中断、指令超时、电梯故障等异常情况下,系统的应对策略是否安全可靠,确保机器人不会因电梯系统的小故障而"被困"。
终极验收标准
- 电梯原功能零损伤(如消防迫降、无障碍呼叫)。
- 机器人召梯成功率≥99.9%,响应延迟<1.5秒。
- 所有接线均有永久性标签,图纸归档维保部门。
✨ 工程经验提示:轿顶设备线缆需用缠绕管防护,避免与随行电缆摩擦!联调阶段建议使用Wireshark抓包工具排查通讯丢包问题。