PID算法是什么
PID 控制算法是自动化领域应用最广泛的经典控制算法。
PID 是通过**误差(Error)**来调整输出的反馈机制。误差等于"你想要的目标值"减去"目前的实际值"。
P (Proportional) - 比例:解决"当前"的误差
-
原理:输出与误差成正比。误差越大,给的力越大。
-
直观感受:离红线越远,油门踩得越深。
-
缺点 :存在静差。当车非常接近红线时,误差极小,踩油门的力可能不足以克服摩擦力,导致车停在红线前一点点,永远到不了目标点。
I (Integral) - 积分:解决"累积"的误差
-
原理:将过去一段时间的所有误差加起来。
-
直观感受:如果你停在红线前不动了,误差会随时间累积。积分项会发现"我们还没到!",然后慢慢加大油门,直到车刚好停在红线上,消除静差。
-
缺点 :容易导致超调。力给得太猛,车可能会冲过红线。
D (Derivative) - 微分:预测"未来"的误差
-
原理:计算速度。
-
直观感受:如果发现车速极快,正在飞速接近红线,微分项会提前"踩刹车"减速。
-
作用:它起到了阻尼的作用,能有效减少振荡和超调,让系统更稳。
PID的输出到底是什么东西?
PID的输出应该是初始状态跟目标状态(温度,速度,位置等等),输出从本质来讲是"能量的浓度"。 比如你现在想要让从a点到b点,输出的能量可以说是油门踩下的深度(或者电机的转速,或者pwm的占空比无所谓,他们之间是一种线性关系),pid在t时刻的输出是一个数字,这个数字越大就是在告诉你t时刻应该踩深点,电机转快点,pwm的占空比应该再大一些,他们之间可以理解成一种线性映射的转换关系。
专业点来说,PID的输出是一个控制量,是一个无量纲的数值(比如 float 范围 -1.0 到 1.0,或者 int 0 到 255)。它代表了控制器**"想要"执行器(Actuator)施加多大的修正力度**。代表的是**"致动器的做功强度"或"控制信号的幅值"**。例子: 控制温度时,输出是加热功率(类似于能量流率)。

PID 算法优缺点对比表
| 维度 | 优点 (Advantages) | 缺点 (Disadvantages) |
|---|---|---|
| 模型依赖 | 无需数学模型:典型的"黑盒"控制,不需要知道受控对象的物理方程(如 F=ma),通过试凑参数即可。 | 缺乏预见性:因为没有模型,它无法预测未来的状态,只能对已经发生的误差做出反应(滞后性)。 |
| 计算复杂度 | 仅涉及加减乘除 | 难以处理多输入多输出 |
| 工程实现 | 代码实现简单 | 约束处理能力差 |
| 性能表现 | 鲁棒性较好 | 调参往往依赖工程师的经验,对于非线性、时变系统很难达到最优状态。 |
| 适用范围 | 工业界 90% 都在用 PID。 | 不适合精细规划 |
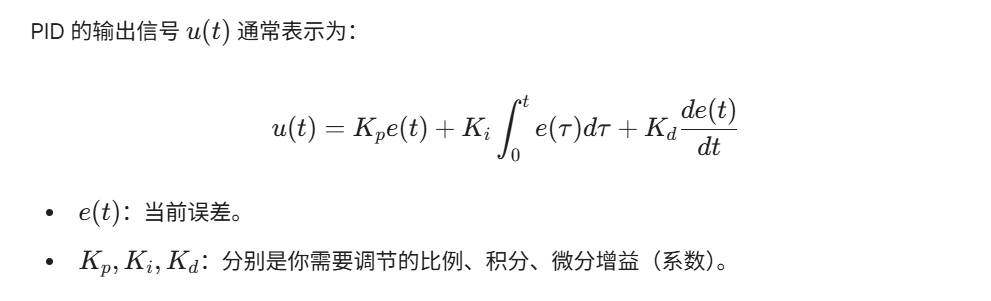
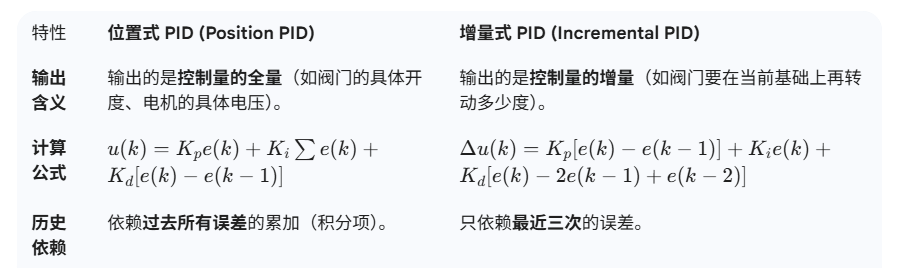
PID公式
如何使用或者部署PID算法:
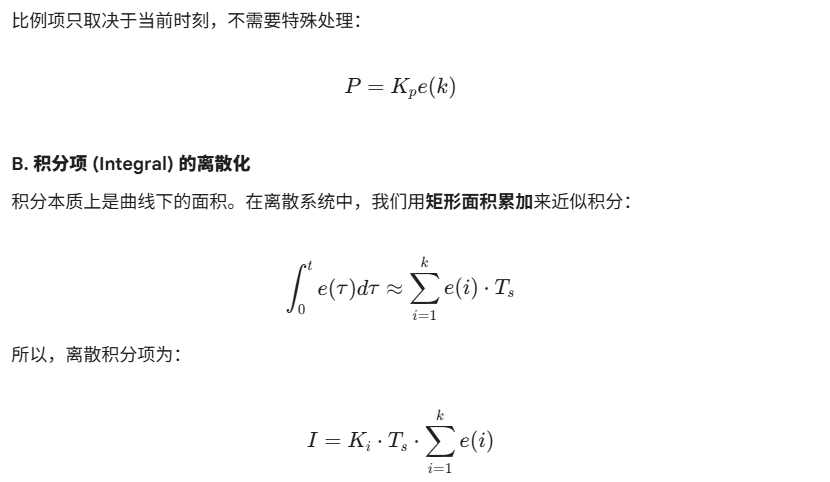
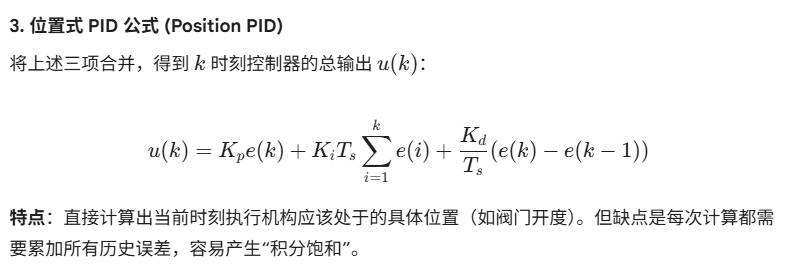
1.将PID公式离散化


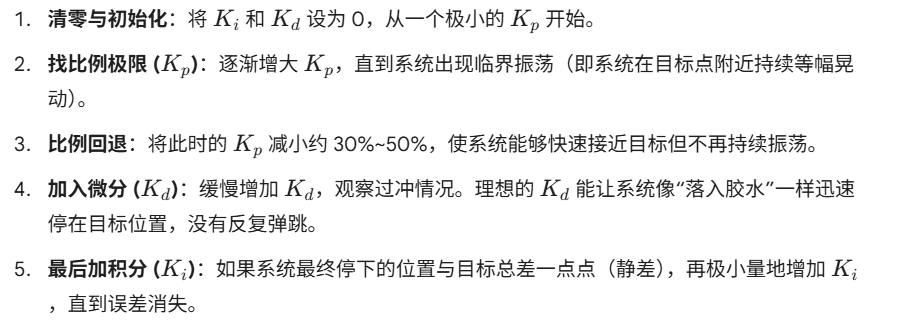
PID调参经验: